Chapter 4 Threads & Concurrency
The process model introduced in Chapter 3 assumed that a process was an executing program with a single thread of control. Virtually all modern operat- ing systems, however, provide features enabling a process to contain multiple threads of control. Identifying opportunities for parallelism through the use of threads is becoming increasingly important for modern multicore systems that provide multiple CPUs.
In this chapter, we introduce many concepts, as well as challenges, associ- ated with multithreaded computer systems, including a discussion of the APIs for the Pthreads, Windows, and Java thread libraries. Additionally, we explore several new features that abstract the concept of creating threads, allowing developers to focus on identifying opportunities for parallelism and letting language features and API frameworks manage the details of thread creation and management. We look at a number of issues related to multithreaded pro- gramming and its effect on the design of operating systems. Finally, we explore how the Windows and Linux operating systems support threads at the kernel level.
Chapter Objectives
- Identify the basic components of a thread, and contrast threads and processes.
- Describe the major benefits and significant challenges of designing multithreaded processes.
- Illustrate different approaches to implicit threading, including thread pools, fork-join, and Grand Central Dispatch.
- Describe how the Windows and Linux operating systems represent threads.
- Design multithreaded applications using the Pthreads, Java, and Windows threading APIs.
4.1 Overview
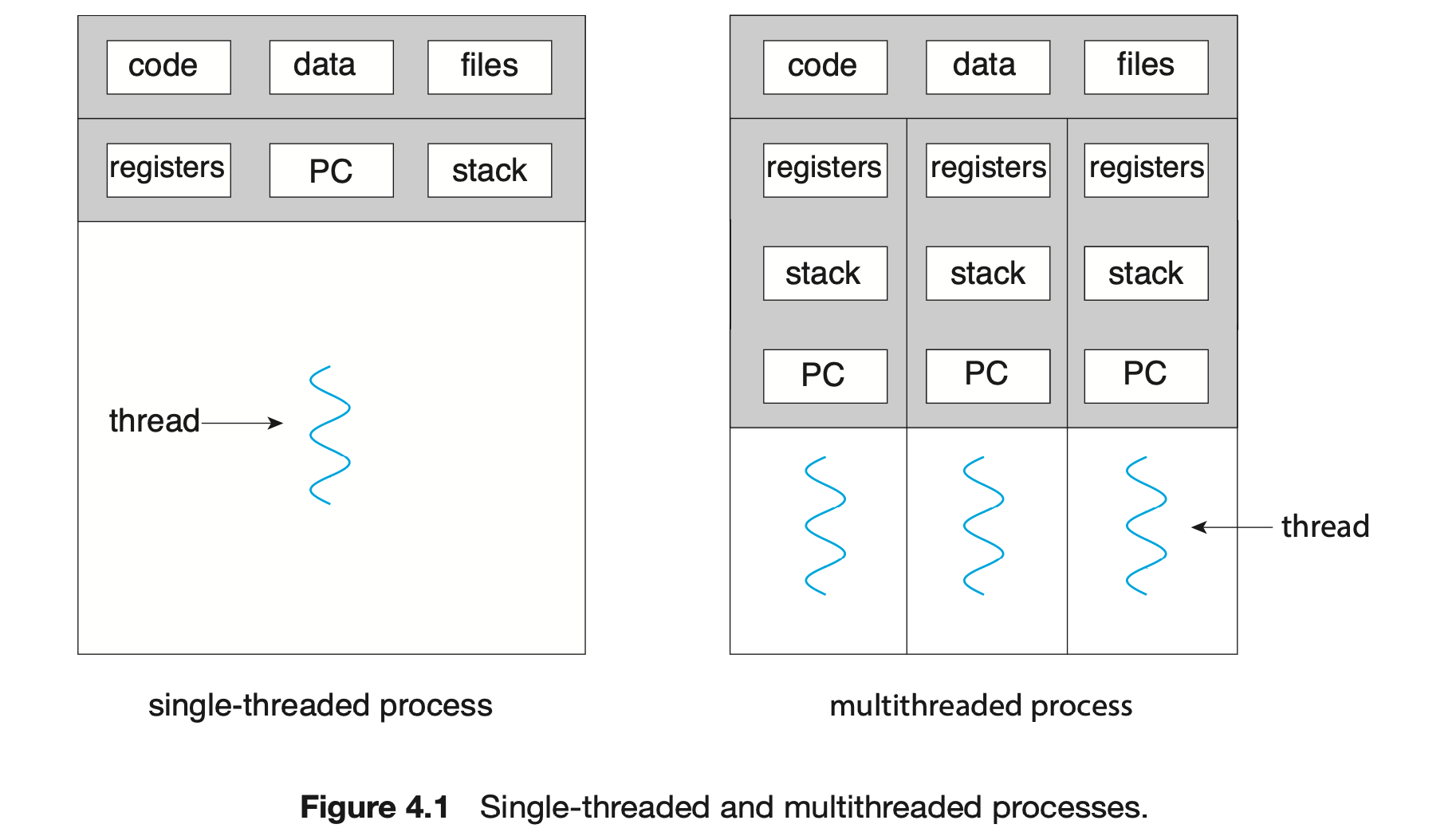
A thread is a basic unit of CPU utilization; it comprises a thread ID, a program counter (PC), a register set, and a stack. It shares with other threads belonging to the same process its code section, data section, and other operating-system resources, such as open files and signals. A traditional process has a single thread of control. If a process has multiple threads of control, it can perform more than one task at a time. Figure 4.1 illustrates the difference between a traditional single-threaded process and a multithreaded process.
4.1.1 Motivation
Most software applications that run on modern computers and mobile devices are multithreaded. An application typically is implemented as a separate process with several threads of control. Below we highlight a few examples of multithreaded applications:
- An application that creates photo thumbnails from a collection of images may use a separate thread to generate a thumbnail from each separate image.
- A web browser might have one thread display images or text while another thread retrieves data from the network.
- A word processor may have a thread for displaying graphics, another thread for responding to keystrokes from the user, and a third thread for performing spelling and grammar checking in the background.
Applications can also be designed to leverage processing capabilities on multicore systems. Such applications can perform several CPU-intensive tasks in parallel across the multiple computing cores.
In certain situations, a single application may be required to perform several similar tasks. For example, a web server accepts client requests for web pages, images, sound, and so forth. A busy web server may have several (perhaps thousands of) clients concurrently accessing it. If the web server ran as a traditional single-threaded process, it would be able to service only one client at a time, and a client might have to wait a very long time for its request to be serviced.
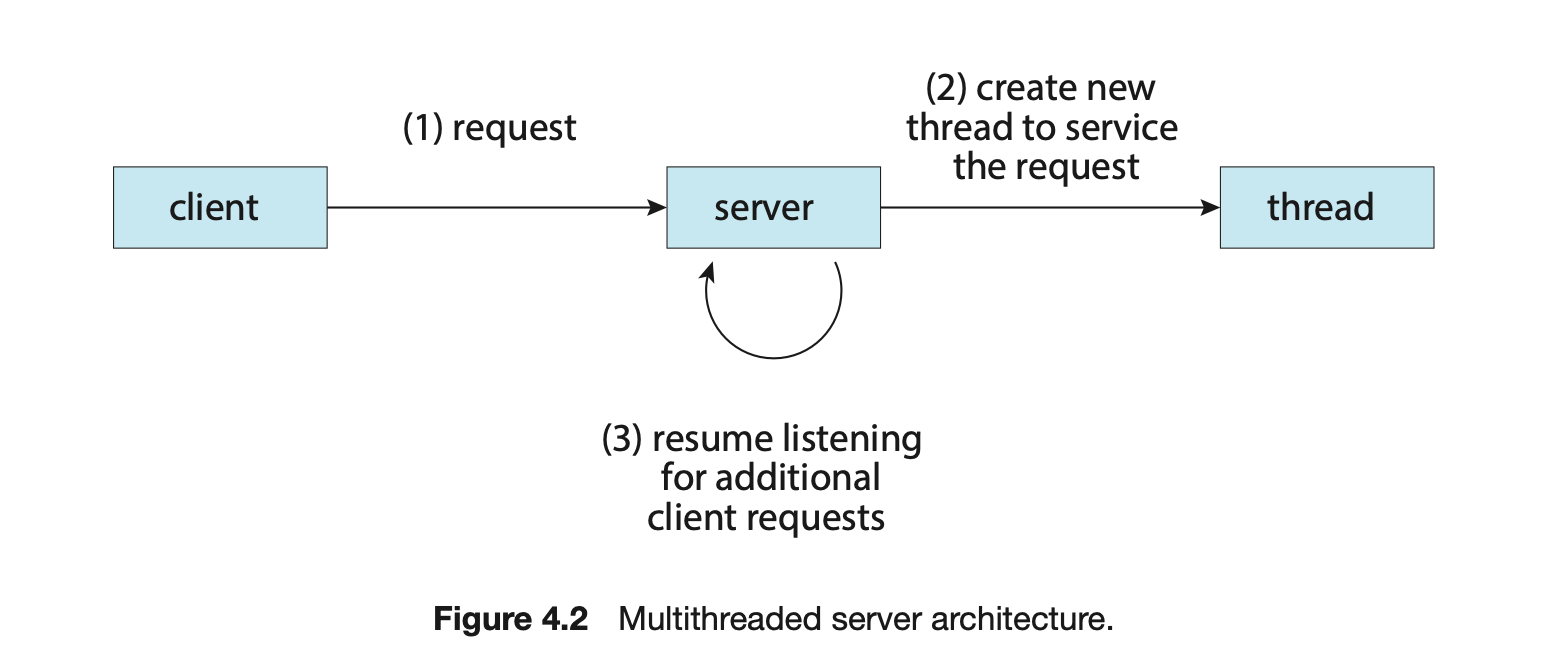
One solution is to have the server run as a single process that accepts requests. When the server receives a request, it creates a separate process to service that request. In fact, this process-creation method was in common use before threads became popular. Process creation is time consuming and resource intensive, however. If the new process will perform the same tasks as the existing process, why incur all that overhead? It is generally more efficient to use one process that contains multiple threads. If the web-server process is multithreaded, the server will create a separate thread that listens for client requests. When a request is made, rather than creating another process, the server creates a new thread to service the request and resumes listening for additional requests. This is illustrated in Figure 4.2.
Most operating system kernels are also typically multithreaded. As an example, during system boot time on Linux systems, several kernel threads are created. Each thread performs a specific task, such as managing devices, memory management, or interrupt handling. The command ps -ef can be used to display the kernel threads on a running Linux system. Examining the output of this command will show the kernel thread kthread (with pid = 2), which serves as the parent of all other kernel threads.
Many applications can also take advantage of multiple threads, including basic sorting, trees, and graph algorithms. In addition, programmers who must solve contemporary CPU-intensive problems in data mining, graphics, and artificial intelligence can leverage the power of modern multicore systems by designing solutions that run in parallel.
4.1.2 Benefits
The benefits of multithreaded programming can be broken down into four major categories:
- Responsiveness. Multithreading an interactive application may allow a program to continue running even if part of it is blocked or is performing a lengthy operation, thereby increasing responsiveness to the user. This quality is especially useful in designing user interfaces. For instance, consider what happens when a user clicks a button that results in the performance of a time-consuming operation. A single-threaded application would be unresponsive to the user until the operation had been completed. In contrast, if the time-consuming operation is performed in a separate, asynchronous thread, the application remains responsive to the user.
- Resource sharing. Processes can share resources only through techniques such as shared memory and message passing. Such techniques must be explicitly arranged by the programmer. However, threads share the memory and the resources of the process to which they belong by default. The benefit of sharing code and data is that it allows an application to have several different threads of activity within the same address space.
- Economy. Allocating memory and resources for process creation is costly. Because threads share the resources of the process to which they belong, it is more economical to create and context-switch threads. Empirically gauging the difference in overhead can be difficult, but in general thread creation consumes less time and memory than process creation. Additionally, context switching is typically faster between threads than between processes.
- Scalability. The benefits of multithreading can be even greater in a multiprocessor architecture, where threads may be running in parallel on different processing cores. A single-threaded process can run on only one processor, regardless how many are available. We explore this issue further in the following section.
4.2 Multicore Programming
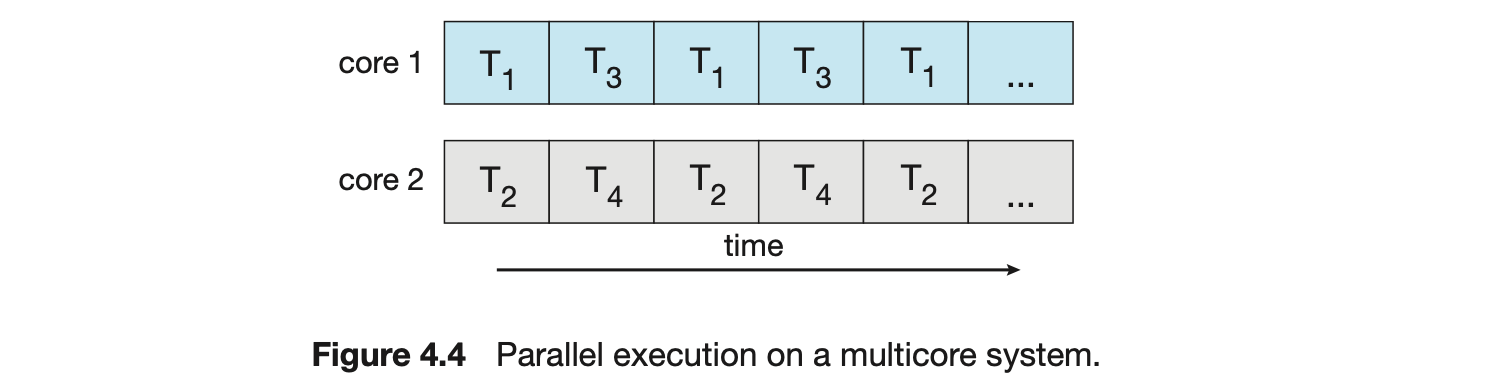
Earlier in the history of computer design, in response to the need for more computing performance, single-CPU systems evolved into multi-CPU systems. A later, yet similar, trend in system design is to place multiple computing cores on a single processing chip where each core appears as a separate CPU to the operating system (Section 1.3.2). We refer to such systems as multicore, and multithreaded programming provides a mechanism for more efficient use of these multiple computing cores and improved concurrency. Consider an application with four threads. On a system with a single computing core, concurrency merely means that the execution of the threads will be interleaved over time (Figure 4.3), because the processing core is capable of executing only one thread at a time. On a system with multiple cores, however, concurrency means that some threads can run in parallel, because the system can assign a separate thread to each core (Figure 4.4).
 Notice the distinction between concurrency and parallelism in this discus- sion. A concurrent system supports more than one task by allowing all the tasks to make progress. In contrast, a parallel system can perform more than one task simultaneously. Thus, it is possible to have concurrency without parallelism. Before the advent of multiprocessor and multicore architectures, most com- puter systems had only a single processor, and CPU schedulers were designed to provide the illusion of parallelism by rapidly switching between processes, thereby allowing each process to make progress. Such processes were running concurrently, but not in parallel.
Notice the distinction between concurrency and parallelism in this discus- sion. A concurrent system supports more than one task by allowing all the tasks to make progress. In contrast, a parallel system can perform more than one task simultaneously. Thus, it is possible to have concurrency without parallelism. Before the advent of multiprocessor and multicore architectures, most com- puter systems had only a single processor, and CPU schedulers were designed to provide the illusion of parallelism by rapidly switching between processes, thereby allowing each process to make progress. Such processes were running concurrently, but not in parallel.
4.2.1 Programming Challenges
The trend toward multicore systems continues to place pressure on system designers and application programmers to make better use of the multiple computing cores. Designers of operating systems must write scheduling algo- rithms that use multiple processing cores to allow the parallel execution shown in Figure 4.4. For application programmers, the challenge is to modify existing programs as well as design new programs that are multithreaded.
In general, five areas present challenges in programming for multicore systems:
-
Identifying tasks. This involves examining applications to find areas that can be divided into separate, concurrent tasks. Ideally, tasks are independent of one another and thus can run in parallel on individual cores.
-
Balance. While identifying tasks that can run in parallel, programmers must also ensure that the tasks perform equal work of equal value. In some instances, a certain task may not contribute as much value to the overall process as other tasks. Using a separate execution core to run that task may not be worth the cost.
Amdahl's Law
Amdahl's Law is a formula that identifies potential performance gains from adding additional computing cores to an application that has both serial (nonparallel) and parallel components. If is the portion of the application that must be performed serially on a system with processing cores, the formula appears as follows:
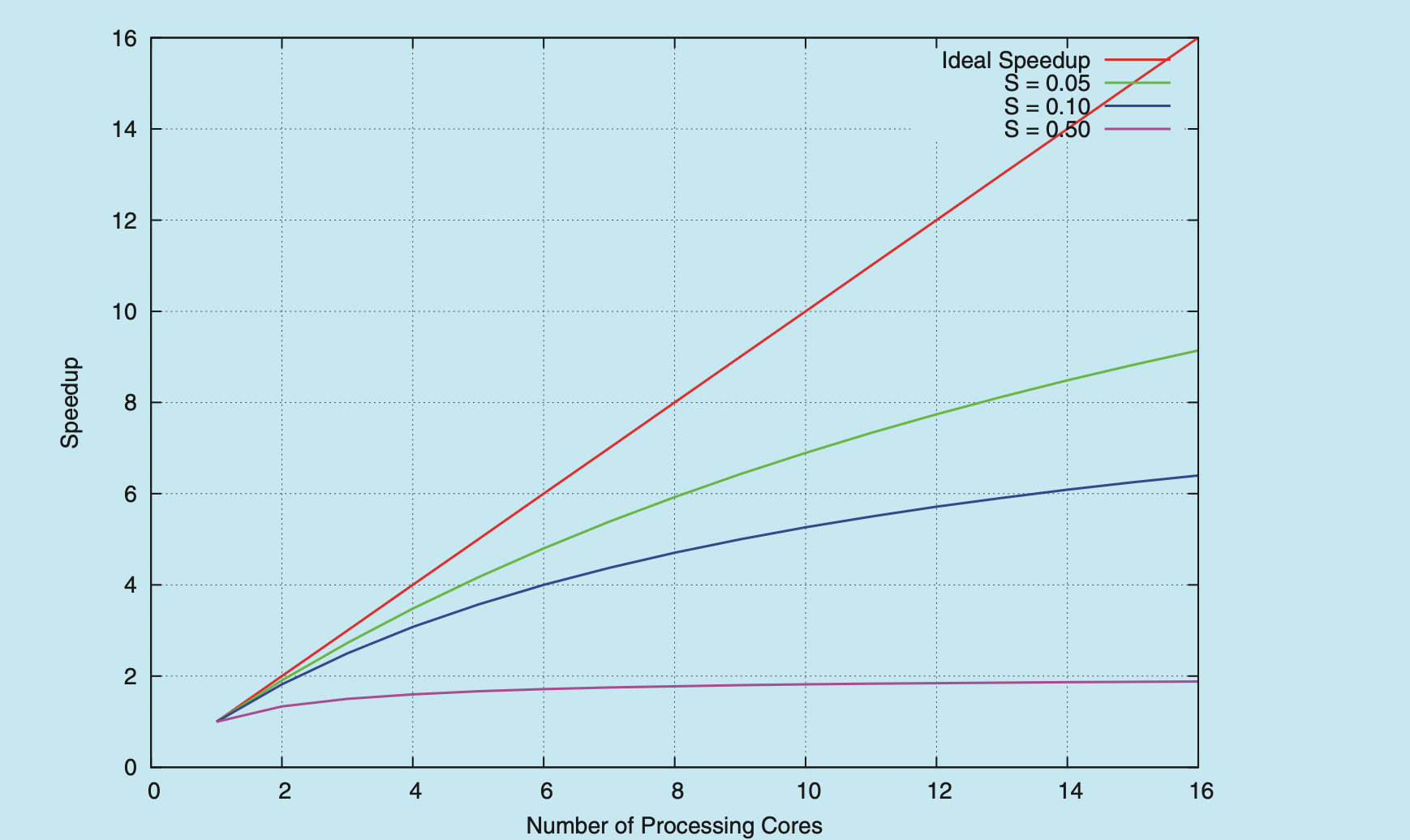
As an example, assume we have an application that is 75 percent parallel and 25 percent serial. If we run this application on a system with two processing cores, we can get a speedup of 1.6 times. If we add two additional cores (for a total of four), the speedup is 2.28 times. Below is a graph illustrating Amdahl's Law in several different scenarios.
One interesting fact about Amdahl’s Law is that as approaches infinity, the speedup converges to . For example, if 50 percent of an application is performed serially, the maximum speedup is 2.0 times, regardless of the number of processing cores we add. This is the fundamental principle behind Amdahl’s Law: the serial portion of an application can have a dispropor- tionate effect on the performance we gain by adding additional computing cores.
-
Data splitting. Just as applications are divided into separate tasks, the data accessed and manipulated by the tasks must be divided to run on separate cores.
-
Data dependency. The data accessed by the tasks must be examined for dependencies between two or more tasks. When one task depends on data from another, programmers must ensure that the execution of the tasks is synchronized to accommodate the data dependency. We examine such strategies in Chapter 6.
- Testing and debugging. When a program is running in parallel on multi- ple cores, many different execution paths are possible. Testing and debug- ging such concurrent programs is inherently more difficult than testing and debugging single-threaded applications.
Because of these challenges, many software developers argue that the advent of multicore systems will require an entirely new approach to designing software systems in the future. (Similarly, many computer science educators believe that software development must be taught with increased emphasis on parallel programming.)
4.2.2 Types of Parallelism
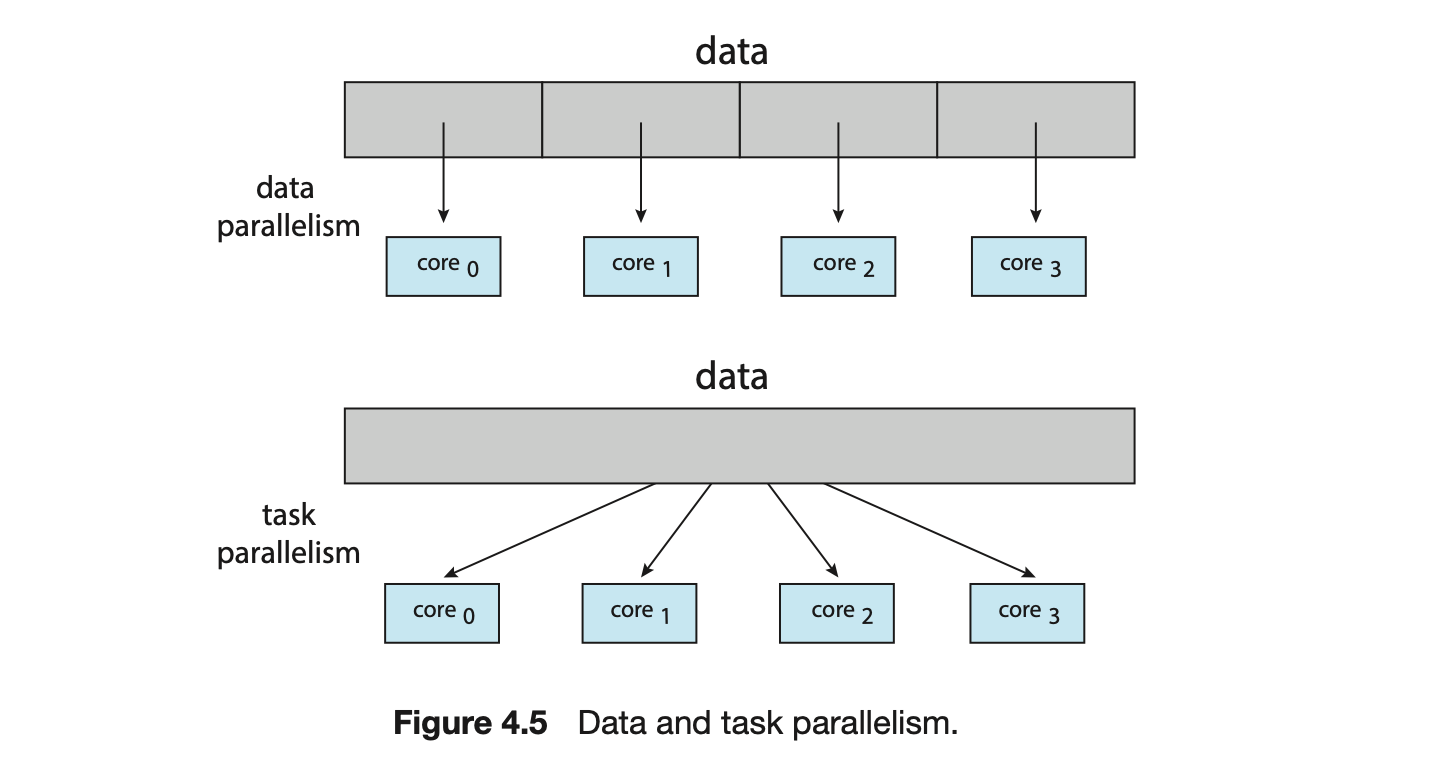
In general, there are two types of parallelism: data parallelism and task parallelism. Data parallelism focuses on distributing subsets of the same data across multiple computing cores and performing the same operation on each core. Consider, for example, summing the contents of an array of size . On a single-core system, one thread would simply sum the elements . On a dual-core system, however, thread , running on core , could sum the elements while thread , running on core , could sum the elements . The two threads would be running in parallel on separate computing cores.
Task parallelism involves distributing not data but tasks (threads) across multiple computing cores. Each thread is performing a unique operation. Different threads may be operating on the same data, or they may be operating on different data. Consider again our example above. In contrast to that situation, an example of task parallelism might involve two threads, each performing a unique statistical operation on the array of elements. The threads again are operating in parallel on separate computing cores, but each is performing a unique operation.
Fundamentally, then, data parallelism involves the distribution of data across multiple cores, and task parallelism involves the distribution of tasks across multiple cores, as shown in Figure 4.5. However, data and task parallelism are not mutually exclusive, and an application may in fact use a hybrid of these two strategies.
4.3 Multithreading Models
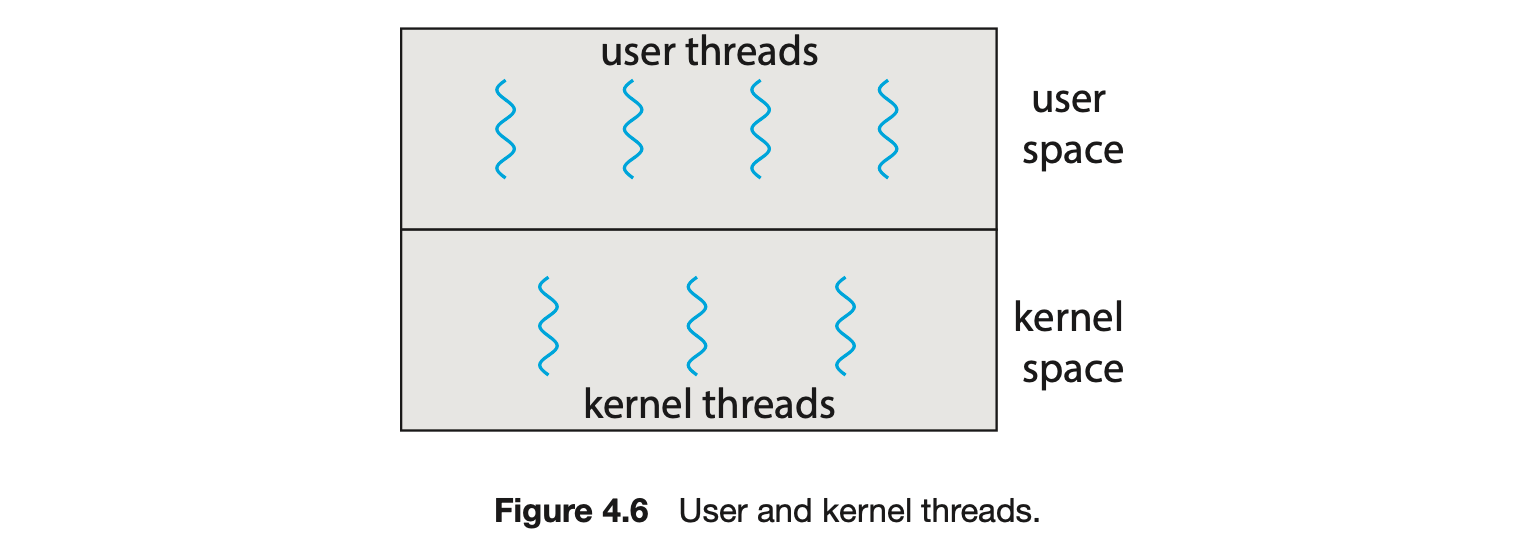
Our discussion so far has treated threads in a generic sense. However, support for threads may be provided either at the user level, for user threads, or by the kernel, for kernel threads. User threads are supported above the kernel and are managed without kernel support, whereas kernel threads are supported and managed directly by the operating system. Virtually all contemporary operating systems--including Windows, Linux, and macOS-- support kernel threads.
Ultimately, a relationship must exist between user threads and kernel threads, as illustrated in Figure 4.6. In this section, we look at three common ways of establishing such a relationship: the many-to-one model, the one-to-one model, and the many-to-many model.
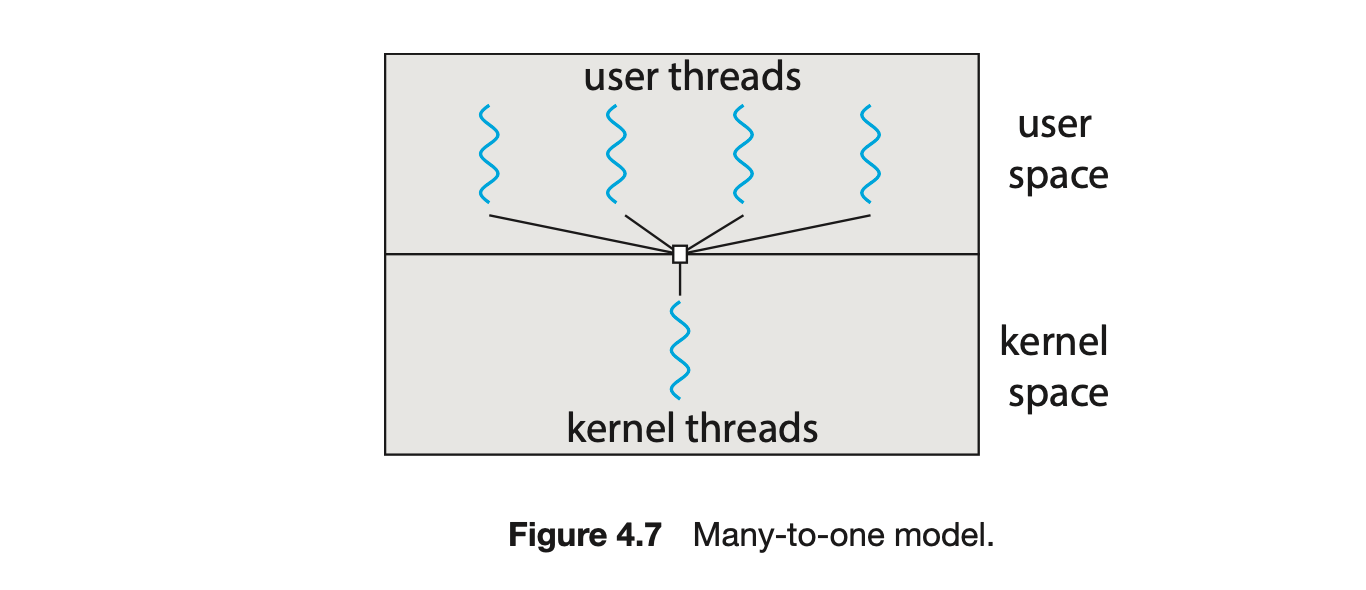
4.3.1 Many-to-One Model
The many-to-one model (Figure 4.7) maps many user-level threads to one kernel thread. Thread management is done by the thread library in user space, so it is efficient (we discuss thread libraries in Section 4.4). However, the entire process will block if a thread makes a blocking system call. Also, because only one thread can access the kernel at a time, multiple threads are unable to run in parallel on multicore systems. Green threads--a thread library available for Solaris systems and adopted in early versions of Java--used the many-to-one model. However, very few systems continue to use the model because of its inability to take advantage of multiple processing cores, which have now become standard on most computer systems.
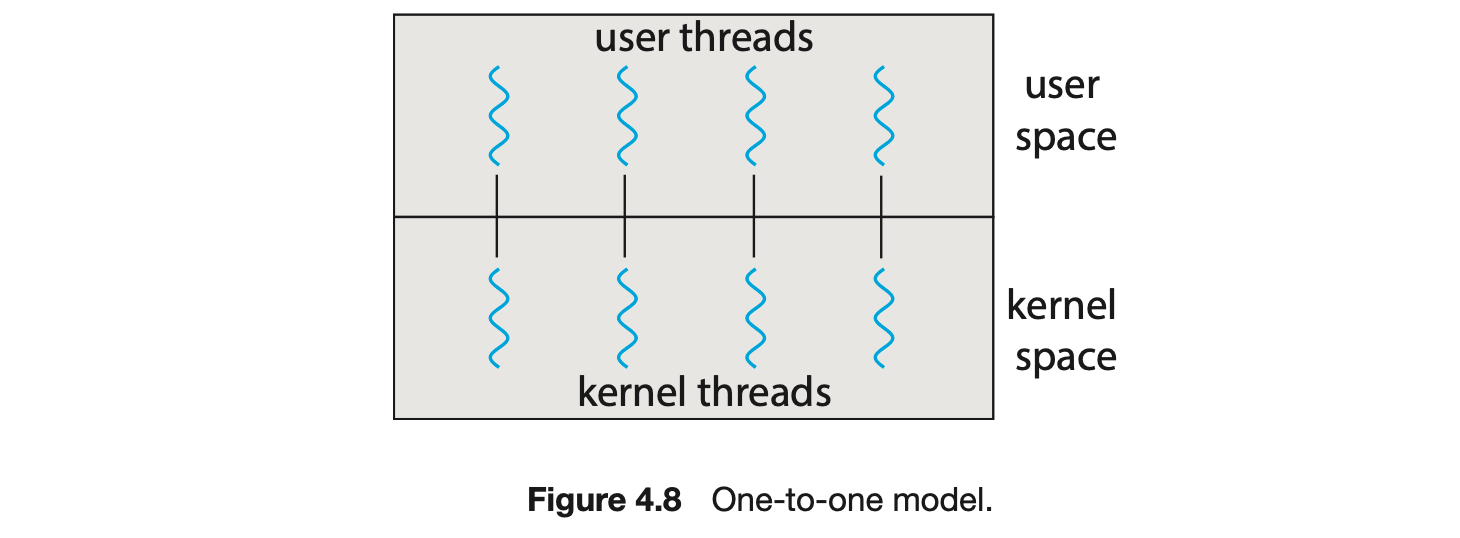
4.3.2 One-to-One Model
The one-to-one model (Figure 4.8) maps each user thread to a kernel thread. It provides more concurrency than the many-to-one model by allowing another thread to run when a thread makes a blocking system call. It also allows multiple threads to run in parallel on multiprocessors. The only drawback to this model is that creating a user thread requires creating the corresponding kernel thread, and a large number of kernel threads may burden the performance of a system. Linux, along with the family of Windows operating systems, implement the one-to-one model.
4.3.3 Many-to-Many Model
The many-to-many model (Figure 4.9) multiplexes many user-level threads to a smaller or equal number of kernel threads. The number of kernel threads may be specific to either a particular application or a particular machine (an application may be allocated more kernel threads on a system with eight processing cores than a system with four cores).
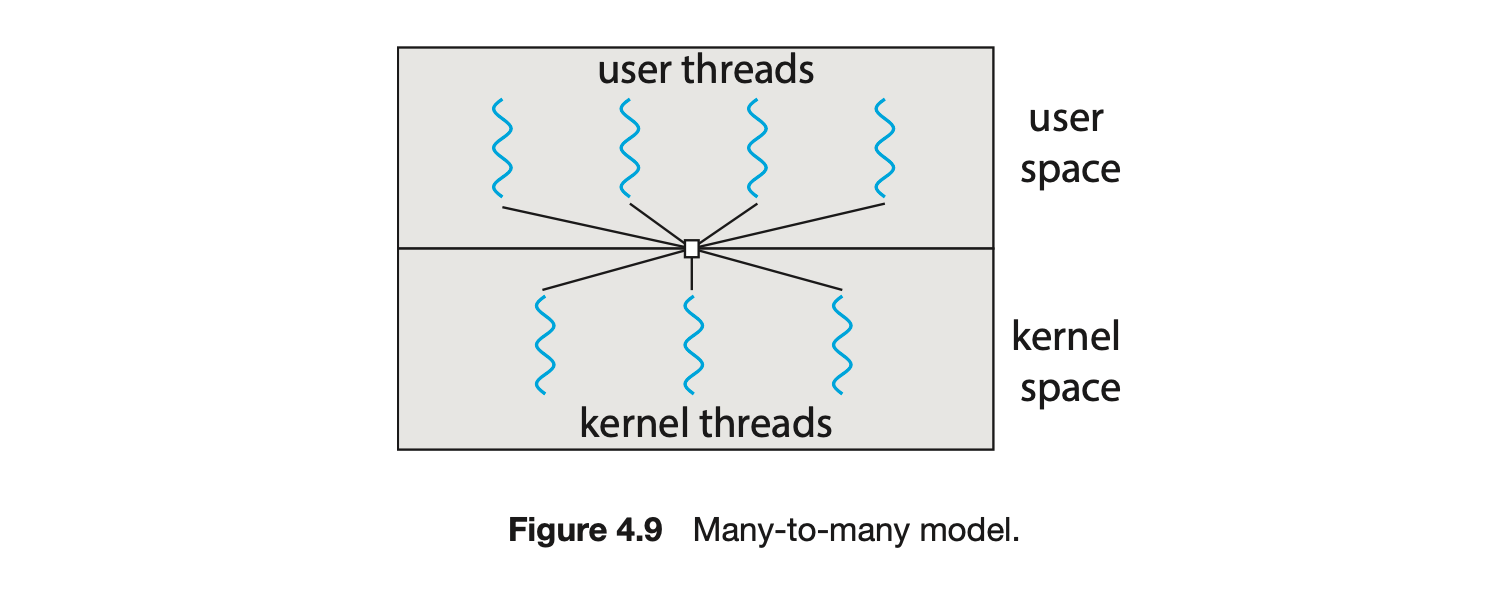
Let's consider the effect of this design on concurrency. Whereas the many-to-one model allows the developer to create as many user threads as she wishes, it does not result in parallelism, because the kernel can schedule only one kernel thread at a time. The one-to-one model allows greater concurrency, but the developer has to be careful not to create too many threads within an application. (In fact, on some systems, she may be limited in the number of threads she can create.) The many-to-many model suffers from neither of these shortcomings: developers can create as many user threads as necessary, and the corresponding kernel threads can run in parallel on a multiprocessor. Also, when a thread performs a blocking system call, the kernel can schedule another thread for execution.
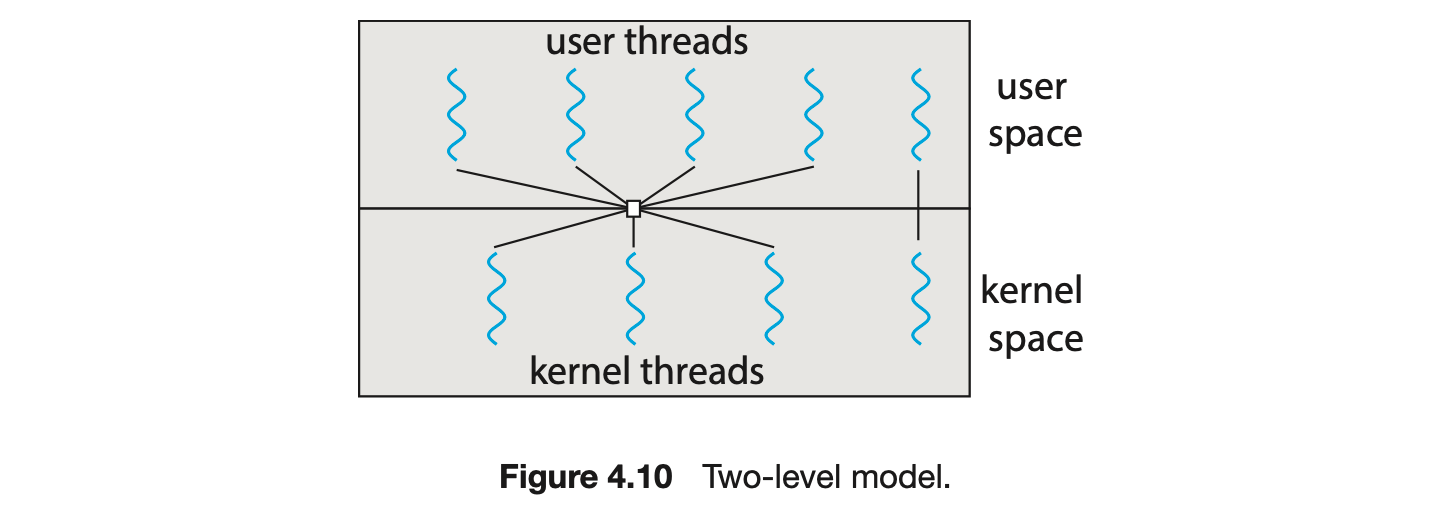
One variation on the many-to-many model still multiplexes many user-level threads to a smaller or equal number of kernel threads but also allows a user-level thread to be bound to a kernel thread. This variation is sometimes referred to as the two-level model (Figure 4.10).
Although the many-to-many model appears to be the most flexible of the models discussed, in practice it is difficult to implement. In addition, with an increasing number of processing cores appearing on most systems, limiting the number of kernel threads has become less important. As a result, most operating systems now use the one-to-one model. However, as we shall see in Section 4.5, some contemporary concurrency libraries have developers identify tasks that are then mapped to threads using the many-to-many model.
4.4 Thread Libraries
A thread library provides the programmer with an API for creating and managing threads. There are two primary ways of implementing a thread library. The first approach is to provide a library entirely in user space with no kernel support. All code and data structures for the library exist in user space. This means that invoking a function in the library results in a local function call in user space and not a system call.
The second approach is to implement a kernel-level library supported directly by the operating system. In this case, code and data structures for the library exist in kernel space. Invoking a function in the API for the library typically results in a system call to the kernel.
Three main thread libraries are in use today: POSIX Pthreads, Windows, and Java. Pthreads, the threads extension of the POSIX standard, may be provided as either a user-level or a kernel-level library. The Windows thread library is a kernel-level library available on Windows systems. The Java thread API allows threads to be created and managed directly in Java programs. However, because in most instances the JVM is running on top of a host operating system, the Java thread API is generally implemented using a thread library available on the host system. This means that on Windows systems, Java threads are typically implemented using the Windows API; UNIX, Linux, and macOS systems typically use Pthreads.
For POSIX and Windows threading, any data declared globally -- that is, declared outside of any function-- are shared among all threads belonging to the same process. Because Java has no equivalent notion of global data, access to shared data must be explicitly arranged between threads.
In the remainder of this section, we describe basic thread creation using these three thread libraries. As an illustrative example, we design a multithreaded program that performs the summation of a non-negative integer in a separate thread using the well-known summation function:

For example, if were 5, this function would represent the summation of integers from 1 to 5, which is 15. Each of the three programs will be run with the upper bounds of the summation entered on the command line. Thus, if the user enters 8, the summation of the integer values from 1 to 8 will be output.
Before we proceed with our examples of thread creation, we introduce two general strategies for creating multiple threads: asynchronous threading and synchronous threading. With asynchronous threading, once the parent creates a child thread, the parent resumes its execution, so that the parent and child execute concurrently and independently of one another. Because the threads are independent, there is typically little data sharing between them. Asynchronous threading is the strategy used in the multithreaded server illustrated in Figure 4.2 and is also commonly used for designing responsive user interfaces.
Synchronous threading occurs when the parent thread creates one or more children and then must wait for all of its children to terminate before it resumes. Here, the threads created by the parent perform work concurrently, but the parent cannot continue until this work has been completed. Once each thread has finished its work, it terminates and joins with its parent. Only after all of the children have joined can the parent resume execution. Typically, synchronous threading involves significant data sharing among threads. For example, the parent thread may combine the results calculated by its various children. All of the following examples use synchronous threading.
4.4.1 Pthreads
Pthreads refers to the POSIX standard (IEEE 1003.1c) defining an API for thread creation and synchronization. This is a specification for thread behavior, not an implementation. Operating-system designers may implement the specificationin any way they wish. Numerous systems implement the Pthreads specification; most are UNIX-type systems, including Linux and macOS. Although Windows doesn't support Pthreads natively, some third-party implementations for Windows are available.
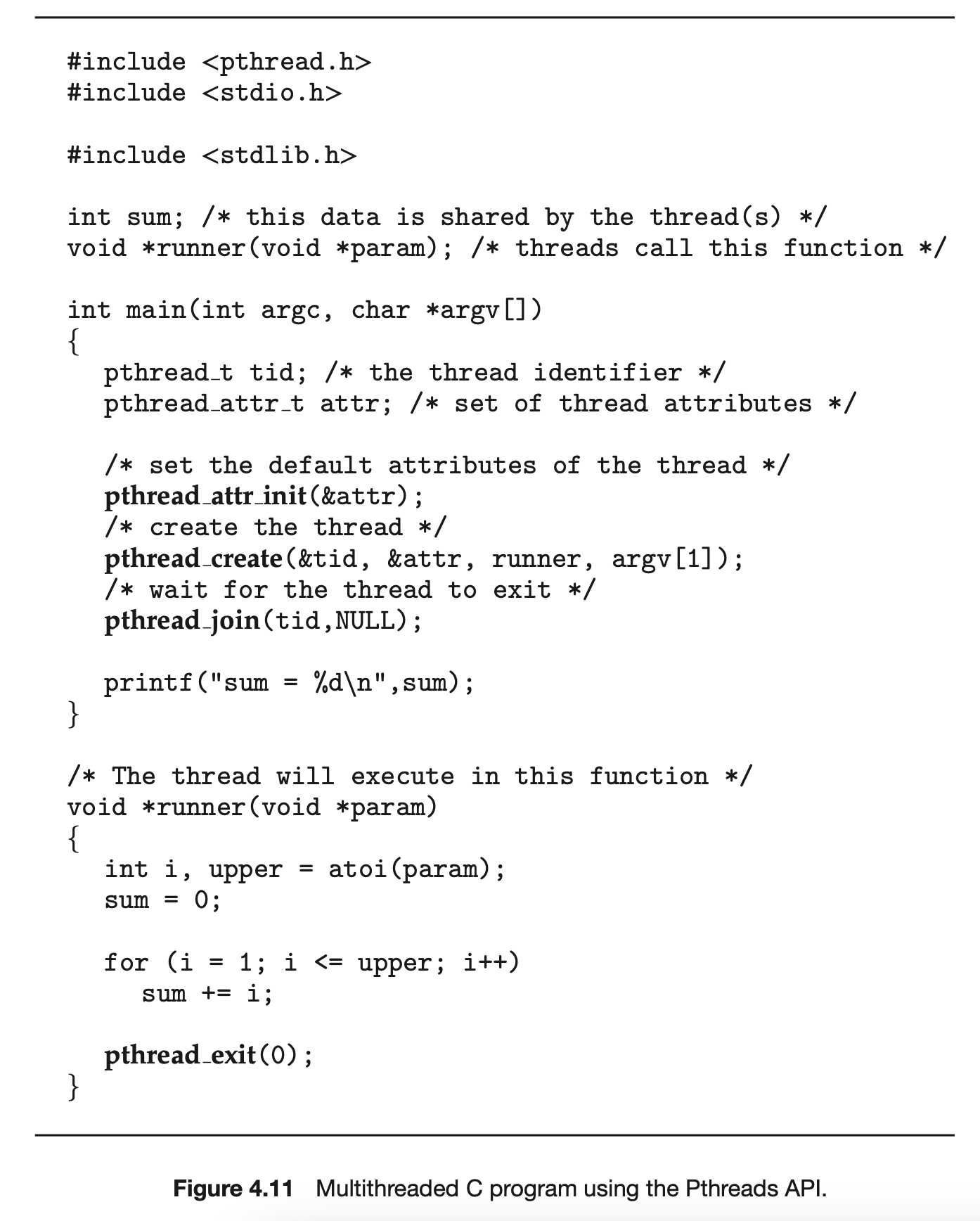
The C program shown in Figure 4.11 demonstrates the basic Pthreads API for constructing a multithreaded program that calculates the summation of a non-negative integer in a separate thread. In a Pthreads program, separate threads begin execution in a specified function. In Figure 4.11, this is the runner() function. When this program begins, a single thread of control begins in main(). After some initialization, main() creates a second thread that begins control in the runner() function. Both threads share the global data sum.
Let's look more closely at this program. All Pthreads programs must include the pthread.h header file. The statement pthread_t tid declares the identifier for the thread we will create. Each thread has a set of attributes, including stack size and scheduling information. The pthread_attr_t attr declaration represents the attributes for the thread. We set the attributes in the function call pthread_attr_init(&attr). Because we did not explicitly set any attributes, we use the default attributes provided. (In Chapter 5, we discuss some of the scheduling attributes provided by the Pthreads API.) A separate thread is created with the pthread_create() function call. In addition to passing the thread identifier and the attributes for the thread, we also pass the name of the function where the new thread will begin execution--in this case, the runner() function. Last, we pass the integer parameter that was provided on the command line, argv[1].
At this point, the program has two threads: the initial (or parent) thread in main() and the summation (or child) thread performing the summation operation in the runner() function. This program follows the thread create/join strategy, whereby after creating the summation thread, the parent thread will wait for it to terminate by calling the pthread_join() function. The summation thread will terminate when it calls the function pthread_exit(). Once the summation thread has returned, the parent thread will output the value of the shared data sum.
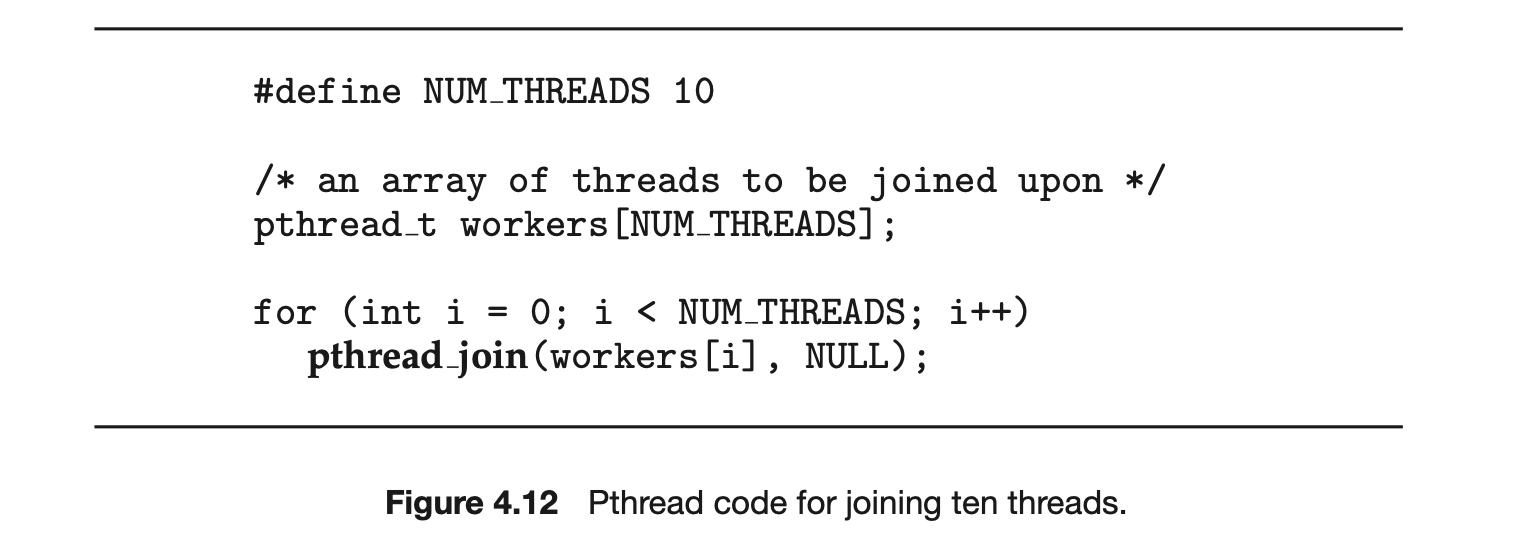
This example program creates only a single thread. With the growing dominance of multicore systems, writing programs containing several threads has become increasingly common. A simple method for waiting on several threads using the pthread_join() function is to enclose the operation within a simple for loop. For example, you can join on ten threads using the Pthread code shown in Figure 4.12.
4.4.2 Windows Threads
The technique for creating threads using the Windows thread library is similar to the Pthreads technique in several ways. We illustrate the Windows thread API in the C program shown in Figure 4.13. Notice that we must include the windows.h header file when using the Windows API.
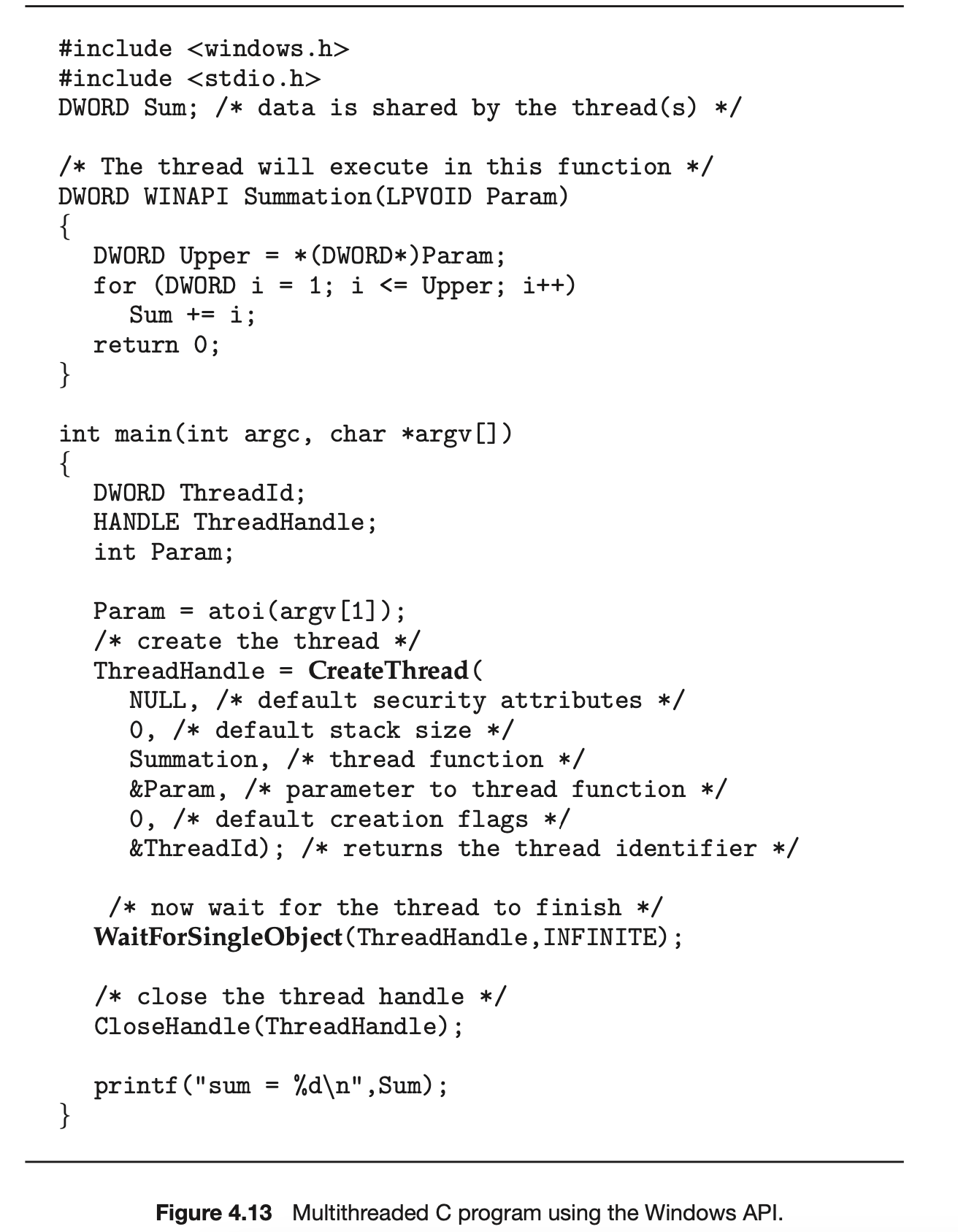
Just as in the Pthreads version shown in Figure 4.11, data shared by the separate threads--in this case, Sum--are declared globally (the DWORD data type is an unsigned 32-bit integer). We also define the Summation() function that is to be performed in a separate thread. This function is passed a pointer to a void, which Windows defines as LPVOID. The thread performing this function sets the global data Sum to the value of the summation from 0 to the parameter passed to Summation().
Threads are created in the Windows API using the CreateThread() function, and--just as in Pthreads--a set of attributes for the thread is passed to this function. These attributes include security information, the size of the stack, and a flag that can be set to indicate if the thread is to start in a suspended state. In this program, we use the default values for these attributes. (The default values do not initially set the thread to a suspended state and instead make it eligible to be run by the CPU scheduler.) Once the summation thread is created, the parent must wait for it to complete before outputting the value of Sum, as the value is set by the summation thread. Recall that the Pthread program (Figure 4.11) had the parent thread wait for the summation thread using the pthread_join() statement. We perform the equivalent of this in the Windows API using the WaitForSingleObject() function, which causes the creating thread to block until the summation thread has exited.
In situations that require waiting for multiple threads to complete, the WaitForMultipleObjects() function is used. This function is passed four parameters:
- The number of objects to wait for
- A pointer to the array of objects
- A flag indicating whether all objects have been signaled
- A timeout duration (or INFINITE)
For example, if THandles is an array of thread HANDLE objects of size N, the parent thread can wait for all its child threads to complete with this statement:

4.4.3 Java Threads
Threads are the fundamental model of program execution in a Java program, and the Java language and its API provide a rich set of features for the creation and management of threads. All Java programs comprise at least a single thread of control--even a simple Java program consisting of only a main() method runs as a single thread in the JVM. Java threads are available on any system that provides a JVM including Windows, Linux, and macOS. The Java thread API is available for Android applications as well.
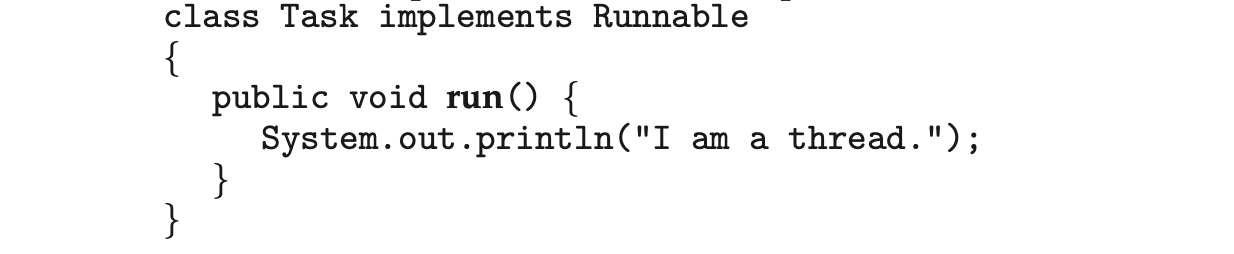
There are two techniques for explicitly creating threads in a Java program. One approach is to create a new class that is derived from the Thread class and to override its run() method. An alternative--and more commonly used --technique is to define a class that implements the Runnable interface. This interface defines a single abstract method with the signature public void run(). The code in the run() method of a class that implements Runnable is what executes in a separate thread. An example is shown below:
LAMBDA EXPRESSIONS IN JAVA Beginning with Version 1.8 of the language, Java introduced Lambda expressions, which allow a much cleaner syntax for creating threads. Rather than defining a separate class that implements Runnable, a Lambda expression can be used instead:
Runnable task = () -> {
System.out.println("I am a thread.");
};
Thread worker = new Thread(task);
worker.start();
Lambda expressions--as well as similar functions known as closures--are a prominent feature of functional programming languages and have been available in several nonfunctional languages as well including Python, C++, and C#. As we shall see in later examples in this chapter, Lambda expressions often provide a simple syntax for developing parallel applications.
Thread creation in Java involves creating a Thread object and passing it an instance of a class that implements Runnable, followed by invoking the start() method on the Thread object. This appears in the following example:
Thread worker = new Thread(new Task());
worker.start();
Invoking the start() method for the new Thread object does two things:
- It allocates memory and initializes a new thread in the JVM.
- It calls the run() method, making the thread eligible to be run by the JVM. (Note again that we never call the run() method directly. Rather, we call the start() method, and it calls the run() method on our behalf.)
Recall that the parent threads in the Pthreads and Windows libraries use pthread_join() and WaitForSingleObject() (respectively) to wait for the summation threads to finish before proceeding. The join() method in Java provides similar functionality. (Notice that join() can throw an InterruptedException, which we choose to ignore.)
try {
worker.join();
}
catch (InterruptedException ie) { }
If the parent must wait for several threads to finish, the join() method can be enclosed in a for loop similar to that shown for Pthreads in Figure 4.12.
4.4.3.1 Java Executor Framework
Java has supported thread creation using the approach we have described thus far since its origins. However, beginning with Version 1.5 and its API, Java introduced several new concurrency features that provide developers with much greater control over thread creation and communication. These tools are available in the java.util.concurrent package.
Rather than explicitly creating Thread objects, thread creation is instead organized around the Executor interface:
 Classes implementing this interface must define the execute() method, which is passed a Runnable object. For Java developers, this means using the Executor rather than creating a separate Thread object and invoking its start() method. The Executor is used as follows:
Classes implementing this interface must define the execute() method, which is passed a Runnable object. For Java developers, this means using the Executor rather than creating a separate Thread object and invoking its start() method. The Executor is used as follows:

The Executor framework is based on the producer-consumer model; tasks implementing the Runnable interface are produced, and the threads that execute these tasks consume them. The advantage of this approach is that it not only divides thread creation from execution but also provides a mechanism for communication between concurrent tasks.
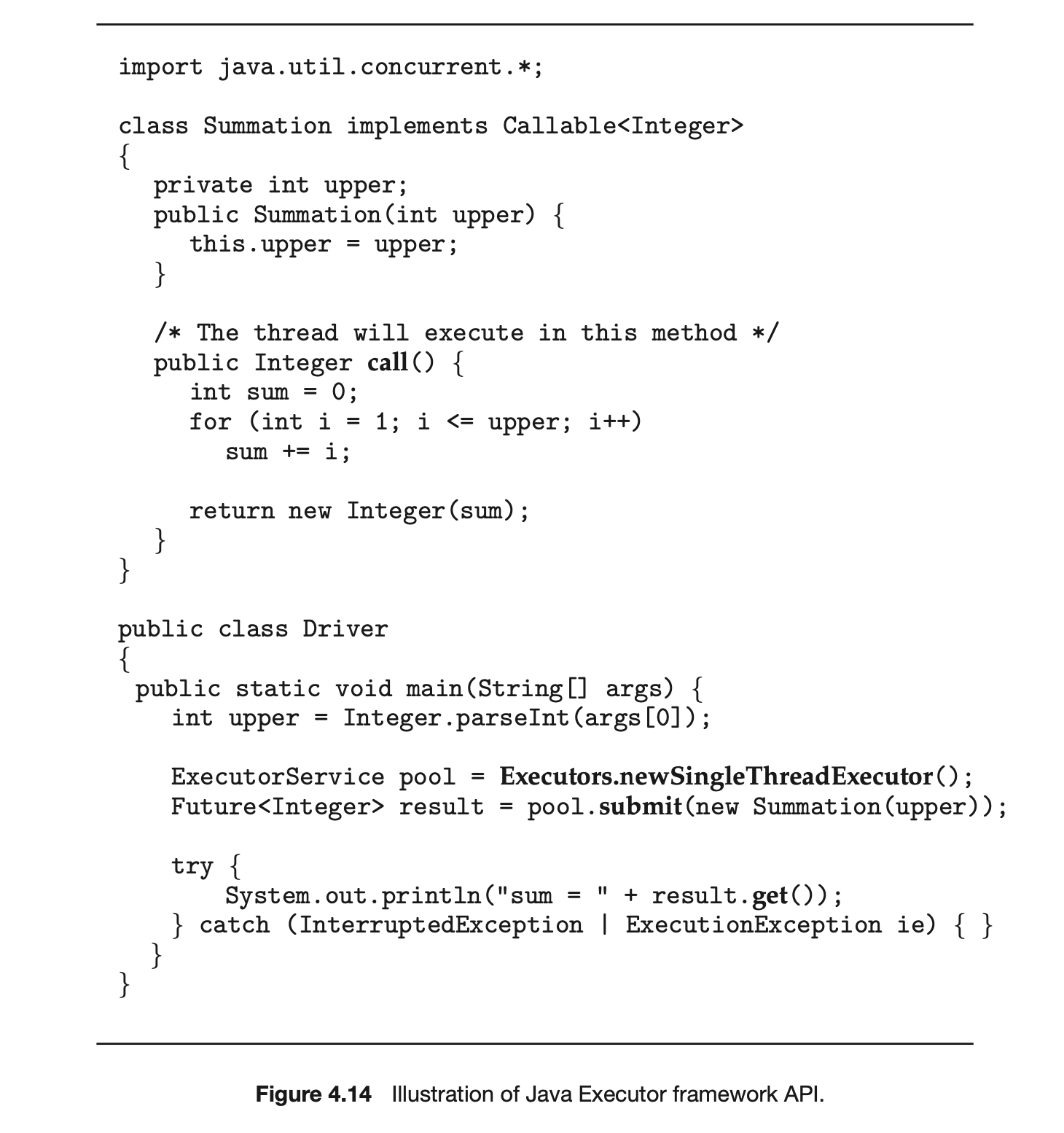
Data sharing between threads belonging to the same process occurs easily in Windows and Pthreads, since shared data are simply declared globally. As a pure object-oriented language, Java has no such notion of global data. We can pass parameters to a class that implements Runnable, but Java threads cannot return results. To address this need, the java.util.concurrent package additionally defines the Callable interface, which behaves similarly to Runnable except that a result can be returned. Results returned from Callable tasks are known as Future objects. A result can be retrieved from the get() method defined in the Future interface. The program shown in Figure 4.14 illustrates the summation program using these Java features.
The Summation class implements the Callable interface, which specifies the method V call()--it is the code in this call() method that is executed in a separate thread. To execute this code, we create a newSingleThreadEx-ecutor object (provided as a static method in the Executors class), which is of type ExecutorService, and pass it a Callable task using its submit() method. (The primary difference between the execute() and submit() methods is that the former returns no result, whereas the latter returns a result as a Future.) Once we submit the callable task to the thread, we wait for its result by calling the get() method of the Future object it returns.
It is quite easy to notice at first that this model of thread creation appears more complicated than simply creating a thread and joining on its termination. However, incurring this modest degree of complication confers benefits. As we have seen, using Callable and Future allows for threads to return results.
 Additionally, this approach separates the creation of threads from the results they produce: rather than waiting for a thread to terminate before retrieving results, the parent instead only waits for the results to become available. Finally, as we shall see in Section 4.5.1, this framework can be combined with other features to create robust tools for managing a large number of threads.
Additionally, this approach separates the creation of threads from the results they produce: rather than waiting for a thread to terminate before retrieving results, the parent instead only waits for the results to become available. Finally, as we shall see in Section 4.5.1, this framework can be combined with other features to create robust tools for managing a large number of threads.
4.5 Implicit Threading
With the continued growth of multicore processing, applications containing hundreds--or even thousands--of threads are looming on the horizon. Designing such applications is not a trivial undertaking: programmers must address not only the challenges outlined in Section 4.2 but additional difficulties as well. These difficulties, which relate to program correctness, are covered in Chapter 6 and Chapter 8.
THE JVM AND THE HOST OPERATING SYSTEM
The JVM is typically implemented on top of a host operating system (see Figure 18.10). This setup allows the JVM to hide the implementation details of the underlying operating system and to provide a consistent, abstract environment that allows Java programs to operate on any platform that supports a JVM. The specification for the JVM does not indicate how Java threads are to be mapped to the underlying operating system, instead leaving that decision to the particular implementation of the JVM. For example, the Windows operating system uses the one-to-one model; therefore, each Java thread for a JVM running on Windows maps to a kernel thread. In addition, there may be a relationship between the Java thread library and the thread library on the host operating system. For example, implementations of a JVM for the Windows family of operating systems might use the Windows API when creating Java threads; Linux and macOS systems might use the Pthreads API.
One way to address these difficulties and better support the design of concurrent and parallel applications is to transfer the creation and management of threading from application developers to compilers and run-time libraries. This strategy, termed implicit threading, is an increasingly popular trend. In this section, we explore four alternative approaches to designing applications that can take advantage of multicore processors through implicit threading. As we shall see, these strategies generally require application developers to identify tasks--not threads--that can run in parallel. A task is usually written as a function, which the run-time library then maps to a separate thread, typically using the many-to-many model (Section 4.3.3). The advantage of this approach is that developers only need to identify parallel tasks, and the libraries determine the specific details of thread creation and management.
4.5.1 Thread Pools
In Section 4.1, we described a multithreaded web server. In this situation, whenever the server receives a request, it creates a separate thread to service the request. Whereas creating a separate thread is certainly superior to creating a separate process, a multithreaded server nonetheless has potential problems. The first issue concerns the amount of time required to create the thread, together with the fact that the thread will be discarded once it has completed its work. The second issue is more troublesome. If we allow each concurrent request to be serviced in a new thread, we have not placed a bound on the number of threads concurrently active in the system. Unlimited threads could exhaust system resources, such as CPU time or memory. One solution to this problem is to use a thread pool.
Android Thread Pools
In Section 3.8.2.1, we covered RPCs in the Android operating system. You may recall from that section that Android uses the Android Interface Definition Language (AIDL), a tool that specifies the remote interface that clients interact with on the server. AIDL also provides a thread pool. A remote service using the thread pool can handle multiple concurrent requests, servicing each request using a separate thread from the pool.
The general idea behind a thread pool is to create a number of threads at start-up and place them into a pool, where they sit and wait for work. When a server receives a request, rather than creating a thread, it instead submits the request to the thread pool and resumes waiting for additional requests. If there is an available thread in the pool, it is awakened, and the request is serviced immediately. If the pool contains no available thread, the task is queued until one becomes free. Once a thread completes its service, it returns to the pool and awaits more work. Thread pools work well when the tasks submitted to the pool can be executed asynchronously.
Thread pools offer these benefits:
- Servicing a request with an existing thread is often faster than waiting to create a thread.
- A thread pool limits the number of threads that exist at any one point. This is particularly important on systems that cannot support a large number of concurrent threads.
- Separating the task to be performed from the mechanics of creating the task allows us to use different strategies for running the task. For example, the task could be scheduled to execute after a time delay or to execute periodically.
The number of threads in the pool can be set heuristically based on factors such as the number of CPUs in the system, the amount of physical memory, and the expected number of concurrent client requests. More sophisticated thread-pool architectures can dynamically adjust the number of threads in the pool according to usage patterns. Such architectures provide the further benefit of having a smaller pool--thereby consuming less memory--when the load on the system is low. We discuss one such architecture, Apple's Grand Central Dispatch, later in this section.
The Windows API provides several functions related to thread pools. Using the thread pool API is similar to creating a thread with the Thread_Create() function, as described in Section 4.4.2. Here, a function that is to run as a separate thread is defined. Such a function may appear as follows:

A pointer to PoolFunction() is passed to one of the functions in the thread pool API, and a thread from the pool executes this function. One such member in the thread pool API is the QueueUserWorkItem() function, which is passed three parameters:
- LPTHREAD_START_ROUTINE Function--a pointer to the function that is to run as a separate thread
- PVOID Param--the parameter passed to Function
- ULONG Flags--flags indicating how the thread pool is to create and manage execution of the thread
An example of invoking a function is the following:
 This causes a thread from the thread pool to invoke PoolFunction() on behalf of the programmer. In this instance, we pass no parameters to PoolFunction(). Because we specify 0 as a flag, we provide the thread pool with no special instructions for thread creation.
This causes a thread from the thread pool to invoke PoolFunction() on behalf of the programmer. In this instance, we pass no parameters to PoolFunction(). Because we specify 0 as a flag, we provide the thread pool with no special instructions for thread creation.
Other members in the Windows thread pool API include utilities that invoke functions at periodic intervals or when an asynchronous I/O request completes.
4.5.1.1 Java Thread Pools
The java.util.concurrent package includes an API for several varieties of thread-pool architectures. Here, we focus on the following three models:
- Single thread executor--newSingleThreadExecutor()--creates a pool of size 1.
- Fixed thread executor--newFixedThreadPool(ints size)--creates a thread pool with a specified number of threads.
- Cached thread executor--newCachedThreadPool()--creates an unbounded thread pool, reusing threads in many instances.
We have, in fact, already seen the use of a Java thread pool in Section 4.4.3, where we created a newSingleThreadExecutor in the program example shown in Figure 4.14. In that section, we noted that the Java executor framework can be used to construct more robust threading tools. We now describe how it can be used to create thread pools.
A thread pool is created using one of the factory methods in the Executors class:
- static ExecutorService newSingleThreadExecutor()
- static ExecutorService newFixedThreadPool(ints size)
- static ExecutorService newCachedThreadPool()
Each of these factory methods creates and returns an object instance that implements the ExecutorService interface. ExecutorService extends the Execufor interface, allowing us to invoke the execute() method on this object. In addition, ExecutorService provides methods for managing termination of the thread pool.
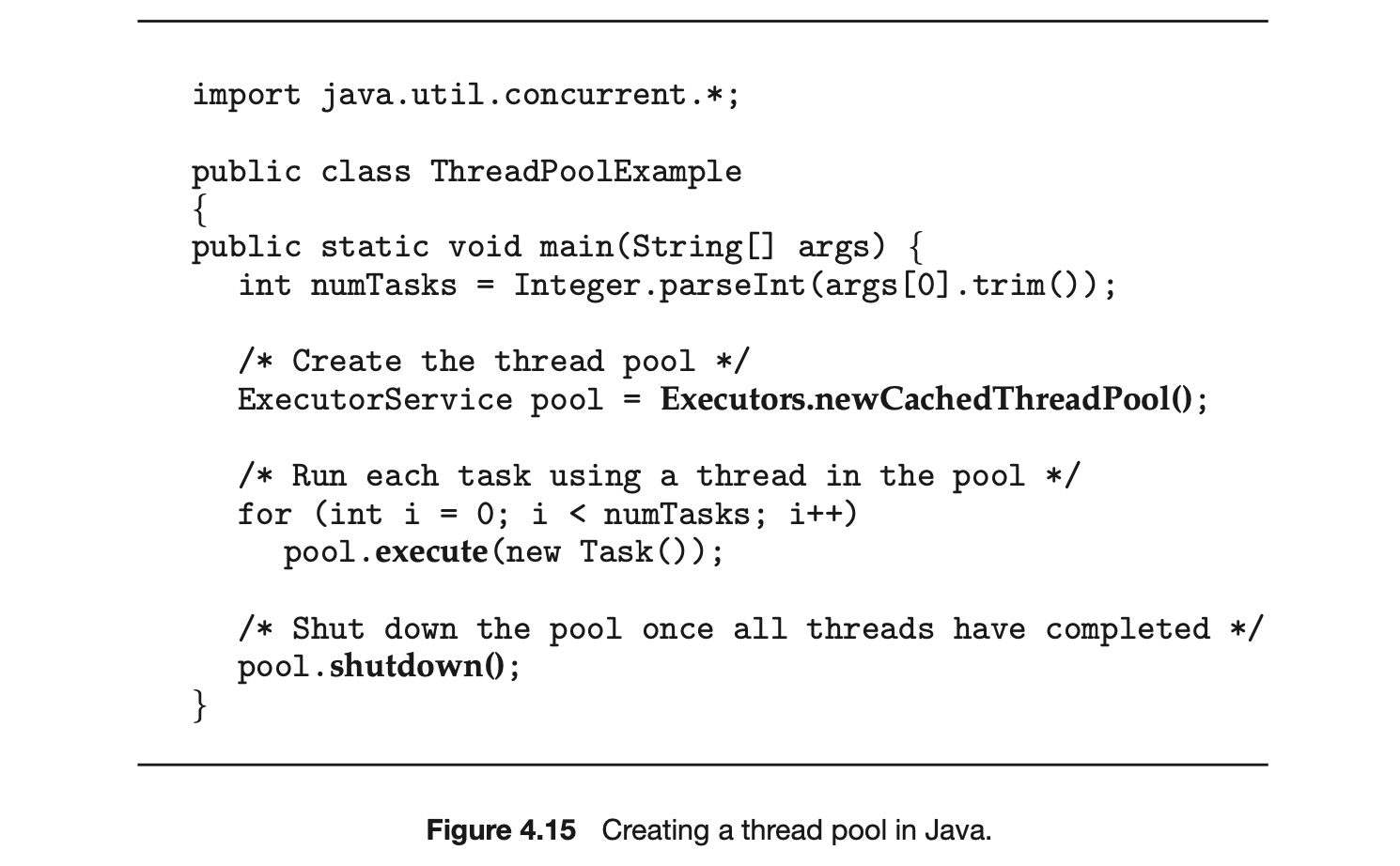
The example shown in Figure 4.15 creates a cached thread pool and submits tasks to be executed by a thread in the pool using the execute() method. When the shutdown() method is invoked, the thread pool rejects additional tasks and shuts down once all existing tasks have completed execution.
4.5.2 Fork Join
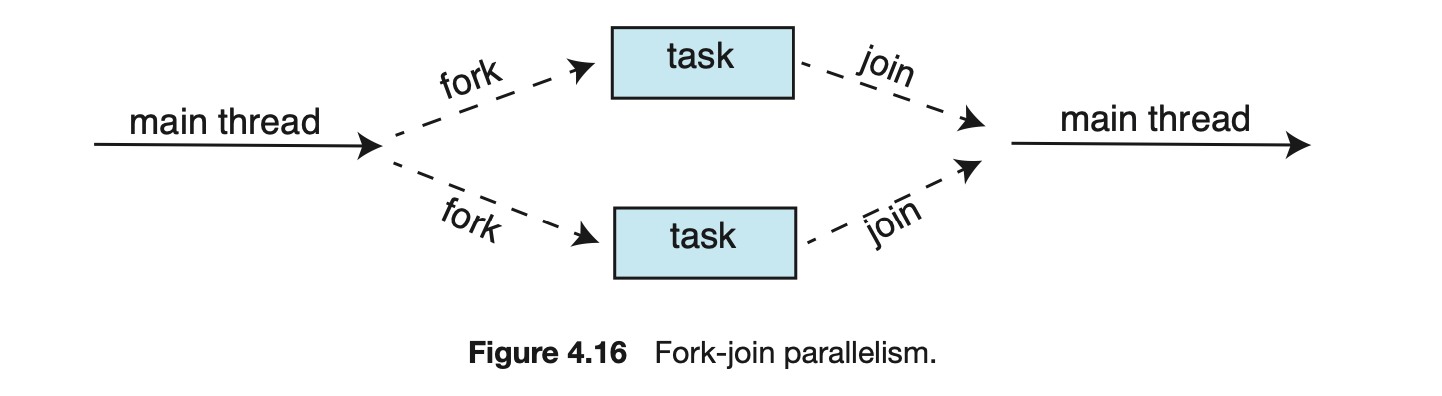
The strategy for thread creation covered in Section 4.4 is often known as the fork-join model. Recall that with this method, the main parent thread creates (forks) one or more child threads and then waits for the children to terminate and join with it, at which point it can retrieve and combine their results. This synchronous model is often characterized as explicit thread creation, but it is also an excellent candidate for implicit threading. In the latter situation, threads are not constructed directly during the fork stage; rather, parallel tasks are designated. This model is illustrated in Figure 4.16. A library manages the number of threads that are created and is also responsible for assigning tasks to threads. In some ways, this fork-join model is a synchronous version of thread pools in which a library determines the actual number of threads to create--for example, by using the heuristics described in Section 4.5.1.
4.5.2.1 Fork Join in Java
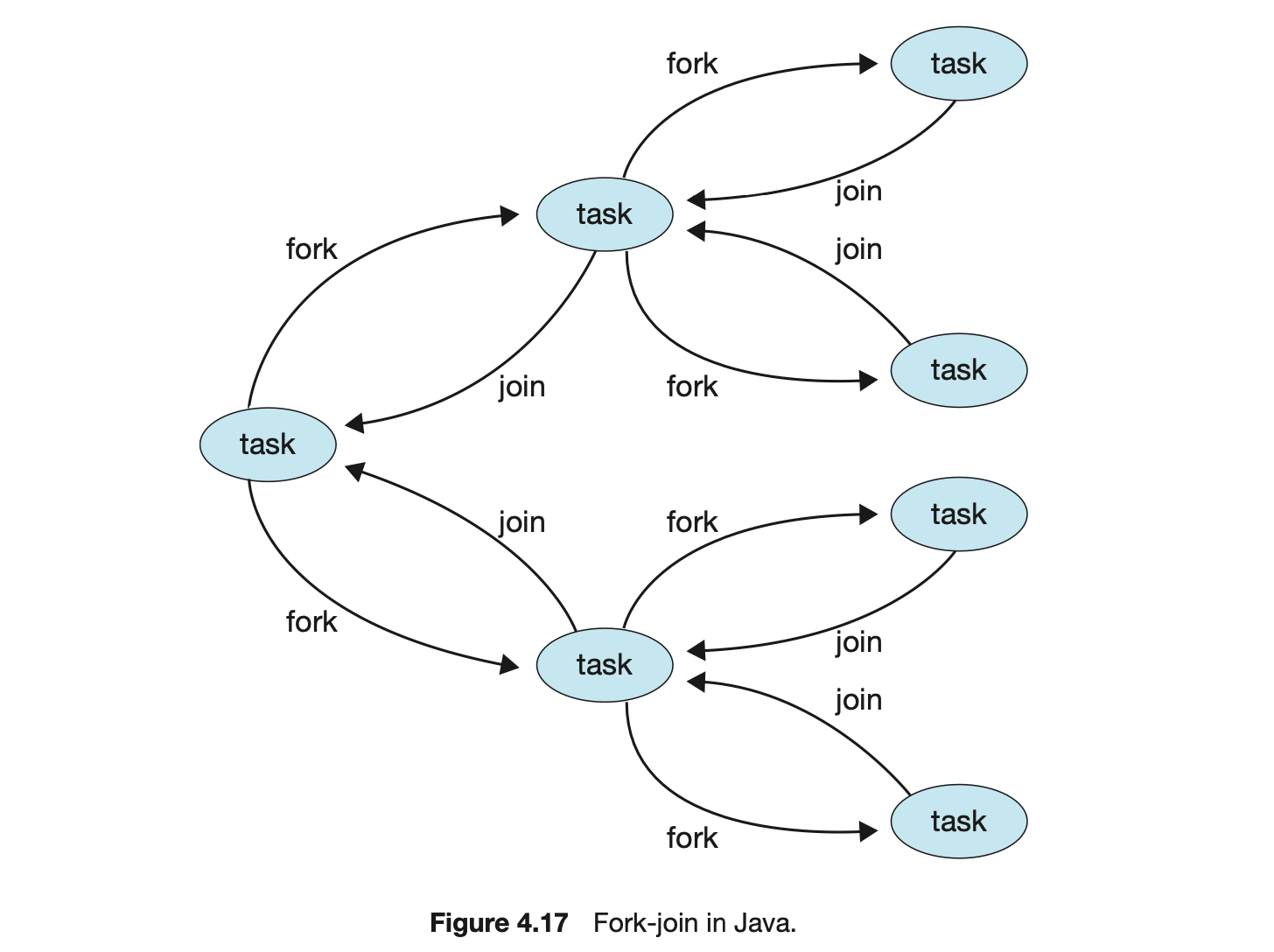
Java introduced a fork-join library in Version 1.7 of the API that is designed to be used with recursive divide-and-conquer algorithms such as Quicksort and Mergesort. When implementing divide-and-conquer algorithms using this library, separate tasks are forked during the divide step and assigned smaller subsets of the original problem. Algorithms must be designed so that these separate tasks can execute concurrently. At some point, the size of the problem assigned to a task is small enough that it can be solved directly and requires creating no additional tasks. The general recursive algorithm behind Java's fork-join model is shown below:
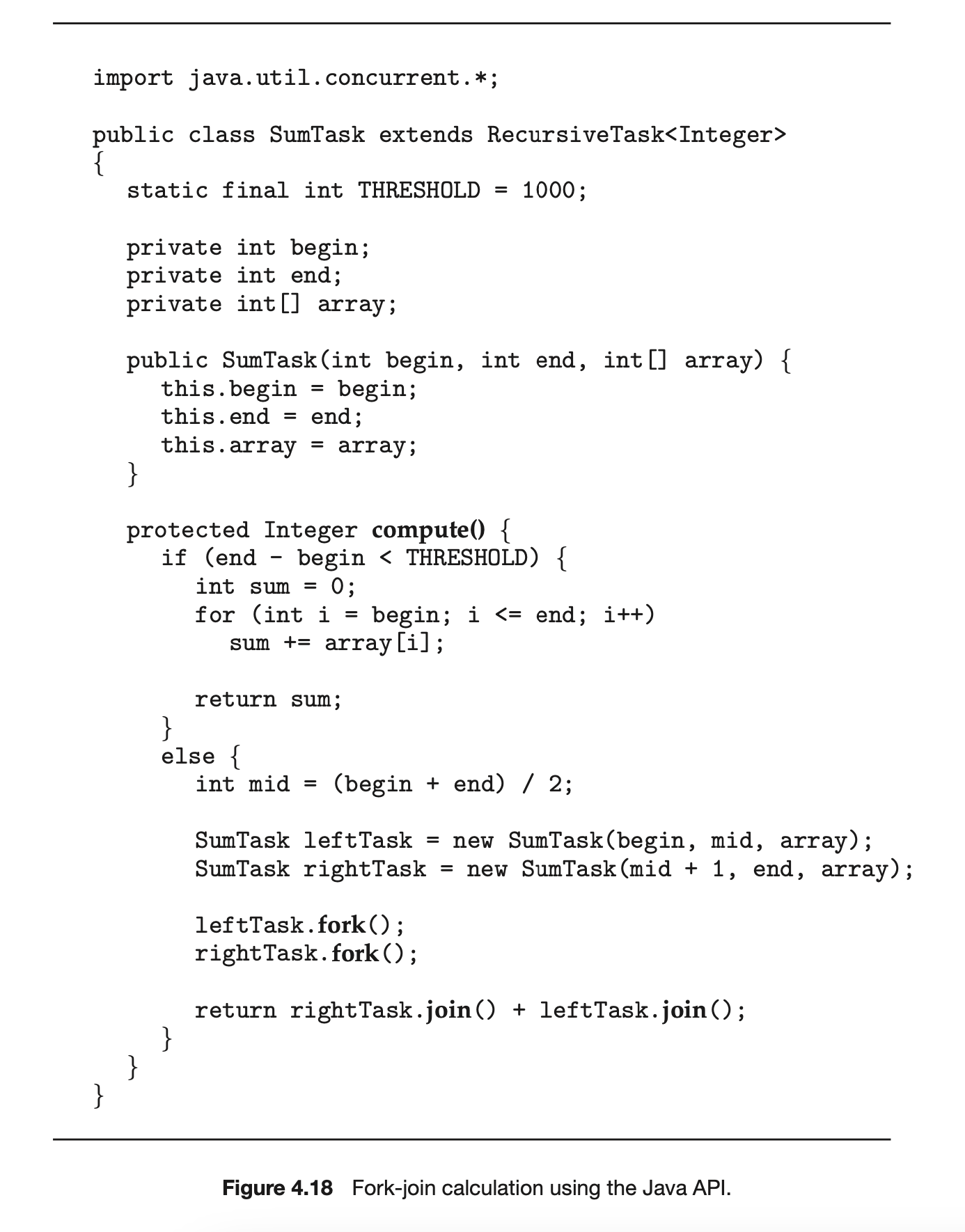
We now illustrate Java's fork-join strategy by designing a divide-and-conquer algorithm that sums all elements in an array of integers. In Version 1.7 of the API Java introduced a new thread pool--the ForkJoinPool--that can be assigned tasks that inherit the abstract base class ForkJoinTask (which for now we will assume is the SumTask class). The following creates a ForkJoinPool object and submits the initial task via its invoke() method:

Upon completion, the initial call to invoke() returns the summation of array.
The class SumTask--shown in Figure 4.18--implements a divide-and-conquer algorithm that sums the contents of the array using fork-join. New tasks are created using the fork() method, and the compute() method specifies the computation that is performed by each task. The method compute() is invoked until it can directly calculate the sum of the subset it is assigned. The call to join() blocks until the task completes, upon which join() returns the results calculated in compute().
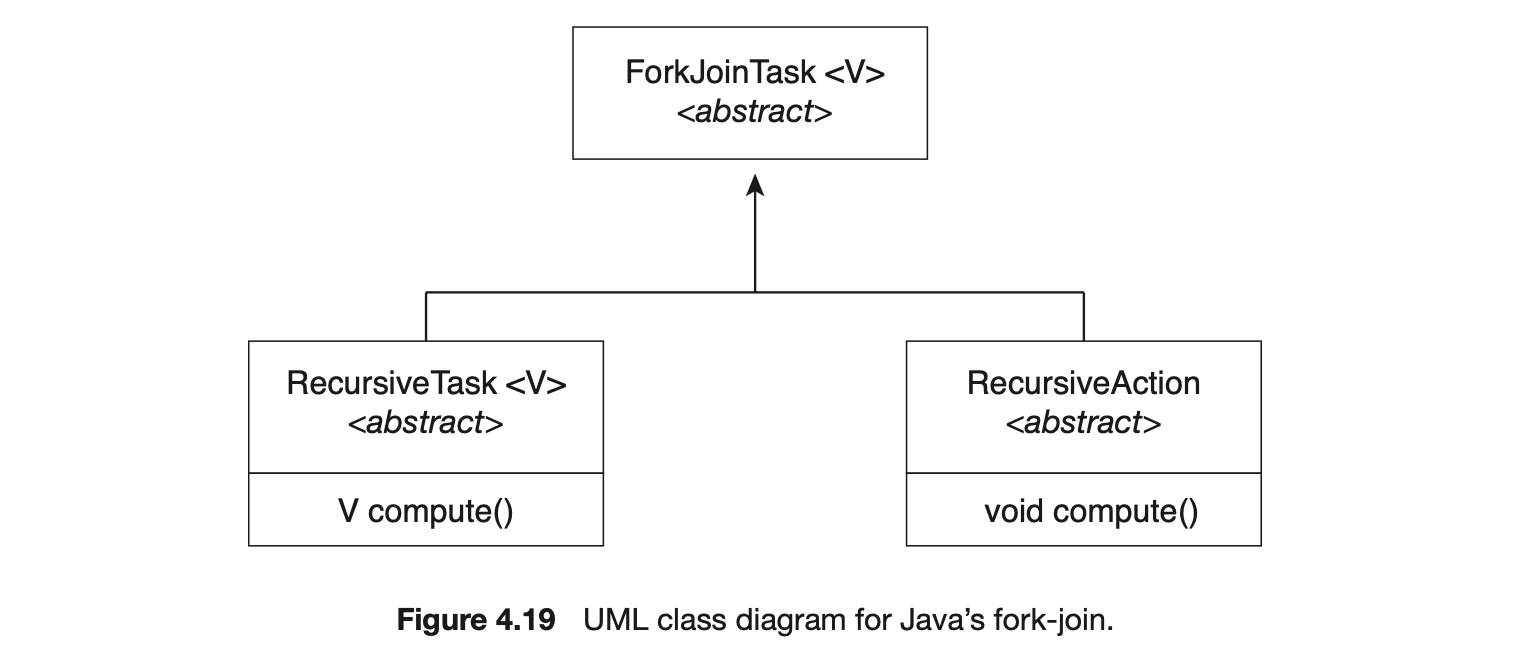
Notice that SumTask in Figure 4.18 extends RecursiveTask. The Java fork-join strategy is organized around the abstract base class ForkJoinTask, and the RecursiveTask and RecursiveAction classes extend this class. The fundamental difference between these two classes is that RecursiveTask returns a result (via the return value specified in compute()), and RecursiveAction does not return a result. The relationship between the three classes is illustrated in the UML class diagram in Figure 4.19.
An important issue to consider is determining when the problem is "small enough" to be solved directly and no longer requires creating additional tasks. In SumTask, this occurs when the number of elements being summed is less than the value THRESHOLD, which in Figure 4.18 we have arbitrarily set to 1,000. In practice, determining when a problem can be solved directly requires careful timing trials, as the value can vary according to implementation.
What is interesting in Java's fork-join model is the management of tasks wherein the library constructs a pool of worker threads and balances the load of tasks among the available workers. In some situations, there are thousands of tasks, yet only a handful of threads performing the work (for example, a separate thread for each CPU). Additionally, each thread in a ForkJoinPool maintains a queue of tasks that it has forked, and if a thread's queue is empty, it can steal a task from another thread's queue using a work stealing algorithm, thus balancing the workload of tasks among all threads.
4.5.3 OpenMP
OpenMP is a set of compiler directives as well as an API for programs written in C, C++, or FORTRAN that provides support for parallel programming in shared-memory environments. OpenMP identifies parallel regions as blocks of code that may run in parallel. Application developers insert compiler directives into their code at parallel regions, and these directives instruct the OpenMP run time library to execute the region in parallel. The following C program illustrates a compiler directive above the parallel region containing the printf() statement:
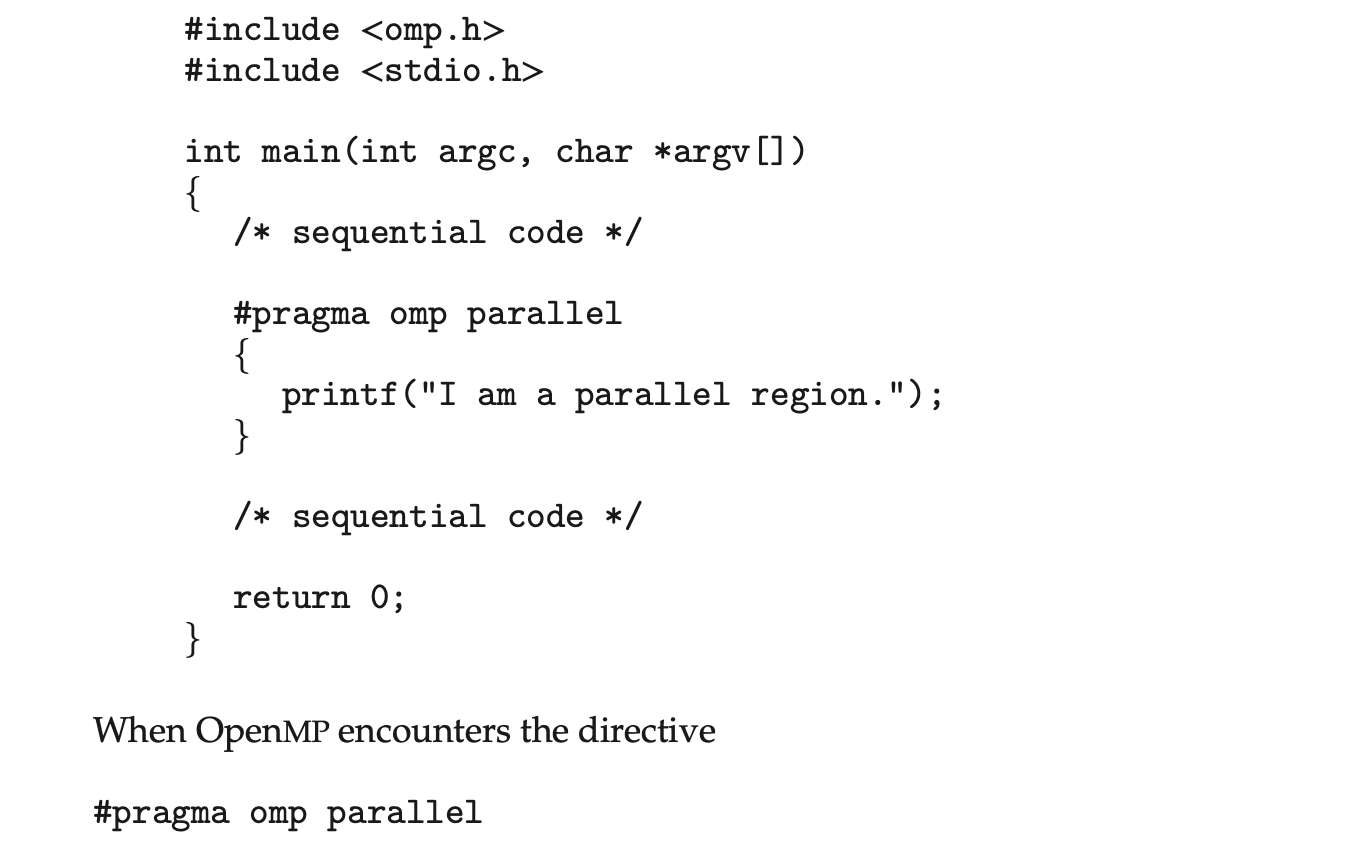
it creates as many threads as there are processing cores in the system. Thus, for a dual-core system, two threads are created; for a quad-core system, four are created; and so forth. All the threads then simultaneously execute the parallel region. As each thread exits the parallel region, it is terminated.
OpenMP provides several additional directives for running code regions in parallel, including parallelizing loops. For example, assume we have two arrays, a and b, of size N. We wish to sum their contents and place the results in array c. We can have this task run in parallel by using the following code segment, which contains the compiler directive for parallelizing for loops:
 OpenMP divides the work contained in the for loop among the threads it has created in response to the directive
OpenMP divides the work contained in the for loop among the threads it has created in response to the directive
 In addition to providing directives for parallelization, OpenMP allows developers to choose among several levels of parallelism. For example, they can set the number of threads manually. It also allows developers to identify whether data are shared between threads or are private to a thread. OpenMP is available on several open-source and commercial compilers for Linux, Windows, and macOS systems. We encourage readers interested in learning more about OpenMP to consult the bibliography at the end of the chapter.
In addition to providing directives for parallelization, OpenMP allows developers to choose among several levels of parallelism. For example, they can set the number of threads manually. It also allows developers to identify whether data are shared between threads or are private to a thread. OpenMP is available on several open-source and commercial compilers for Linux, Windows, and macOS systems. We encourage readers interested in learning more about OpenMP to consult the bibliography at the end of the chapter.
4.5.4 Grand Central Dispatch
Grand Central Dispatch (GCD) is a technology developed by Apple for its macOS and iOS operating systems. It is a combination of a run-time library, an API, and language extensions that allow developers to identify sections of code (tasks) to run in parallel. Like OpenMP, GCD manages most of the details of threading.
GCD schedules tasks for run-time execution by placing them on a dispatch queue. When it removes a task from a queue, it assigns the task to an available thread from a pool of threads that it manages. GCD identifies two types of dispatch queues: serial and concurrent.
Tasks placed on a serial queue are removed in FIFO order. Once a task has been removed from the queue, it must complete execution before another task is removed. Each process has its own serial queue (known as its main queue), and developers can create additional serial queues that are local to a particular process. (This is why serial queues are also known as private dispatch queues.) Serial queues are useful for ensuring the sequential execution of several tasks.
Tasks placed on a concurrent queue are also removed in FIFO order, but several tasks may be removed at a time, thus allowing multiple tasks to execute in parallel. There are several system-wide concurrent queues (also known as global dispatch queues), which are divided into four primary quality-of-service classes:
- QOS_CLASS_USER_INTERACTIVE--The user-interactive class represents tasks that interact with the user, such as the user interface and event handling, to ensure a responsive user interface. Completing a task belonging to this class should require only a small amount of work.
- QOS_CLASS_USER_INITIATED--The user-initiated class is similar to the user-interactive class in that tasks are associated with a responsive user interface; however, user-initiated tasks may require longer processingtimes. Opening a file or a URL is a user-initiated task, for example. Tasks belonging to this class must be completed for the user to continue interacting with the system, but they do not need to be serviced as quickly as tasks in the user-interactive queue.
- QOS_CLASS_UTILITY --The utility class represents tasks that require a longer time to complete but do not demand immediate results. This class includes work such as importing data.
- QOS_CLASS_BACKGROUND --Tasks belonging to the background class are not visible to the user and are not time sensitive. Examples include indexing a mailbox system and performing backups.
Tasks submitted to dispatch queues may be expressed in one of two different ways:
- For the C, C++, and Objective-C languages, GCD identifies a language extension known as a block, which is simply a self-contained unit of work. A block is specified by a caret'inserted in front of a pair of braces { }. Code within the braces identifies the unit of work to be performed. A simple example of a block is shown below:

- For the Swift programming language, a task is defined using a closure, which is similar to a block in that it expresses a self-contained unit of functionality. Syntactically, a Swift closure is written in the same way as a block, minus the leading caret. The following Swift code segment illustrates obtaining a concurrent queue for the user-initiated class and submitting a task to the queue using the dispatch_async() function:
 Internally, GCD's thread pool is composed of POSIX threads. GCD actively manages the pool, allowing the number of threads to grow and shrink according to application demand and system capacity. GCD is implemented by the libdispatch library, which Apple has released under the Apache Commons license. It has since been ported to the FreeBSD operating system.
Internally, GCD's thread pool is composed of POSIX threads. GCD actively manages the pool, allowing the number of threads to grow and shrink according to application demand and system capacity. GCD is implemented by the libdispatch library, which Apple has released under the Apache Commons license. It has since been ported to the FreeBSD operating system.
4.5.5 Intel Thread Building Blocks
Intel threading building blocks (TBB) is a template library that supports designing parallel applications in C++. As this is a library, it requires no special compiler or language support. Developers specify tasks that can run in par allel, and the TBB task scheduler maps these tasks onto underlying threads. Furthermore, the task scheduler provides load balancing and is cache aware, meaning that it will give precedence to tasks that likely have their data stored in cache memory and thus will execute more quickly. TBB provides a rich set of features, including templates for parallel loop structures, atomic operations, and mutual exclusion locking. In addition, it provides concurrent data structures, including a hash map, queue, and vector, which can serve as equivalent thread-safe versions of the C++ standard template library data structures.
Let's use parallel for loops as an example. Initially, assume there is a function named apply(float value) that performs an operation on the parameter value. If we had an array v of size n containing float values, we could use the following serial for loop to pass each value in v to the apply() function:

A developer could manually apply data parallelism (Section 4.2.2) on a multicore system by assigning different regions of the array v to each processing core; however, this ties the technique for achieving parallelism closely to the physical hardware, and the algorithm would have to be modified and recompiled for the number of processing cores on each specific architecture.
Alternatively, a developer could use TBB, which provides a parallel_for template that expects two values:
 where range refers to the range of elements that will be iterated (known as the iteration space) and body specifies an operation that will be performed on a subrange of elements.
where range refers to the range of elements that will be iterated (known as the iteration space) and body specifies an operation that will be performed on a subrange of elements.
We can now rewrite the above serial for loop using the TBB parallel_for template as follows:
 The first two parameters specify that the iteration space is from 0 to (which corresponds to the number of elements in the array v). The second parameter is a C++ lambda function that requires a bit of explanation. The expression
The first two parameters specify that the iteration space is from 0 to (which corresponds to the number of elements in the array v). The second parameter is a C++ lambda function that requires a bit of explanation. The expression [=](size_t i) is the parameter i, which assumes each of the values over the iteration space (in this case from 0 to n - 1). Each value of i is used to identify which array element in v is to be passed as a parameter to the apply(v[i]) function.
The TBB library will divide the loop iterations into separate "chunks" and create a number of tasks that operate on those chunks. (The parallel_for function allows developers to manually specify the size of the chunks if they wish to.) TBB will also create a number of threads and assign tasks to available threads. This is quite similar to the fork-join library in Java. The advantage of this approach is that it requires only that developers identify what operations can run in parallel (by specifying a parallel_for loop), and the library man ages the details involved in dividing the work into separate tasks that run in parallel. Intel TBB has both commercial and open-source versions that run on Windows, Linux, and macOS. Refer to the bibliography for further details on how to develop parallel applications using TBB.
4.6 Threading Issues
In this section, we discuss some of the issues to consider in designing multithreaded programs.
4.6.1 The fork() and exec() System Calls
In Chapter 3, we described how the fork() system call is used to create a separate, duplicate process. The semantics of the fork() and exec() system calls change in a multithreaded program.
If one thread in a program calls fork(), does the new process duplicate all threads, or is the new process single-threaded? Some UNIX systems have chosen to have two versions of fork(), one that duplicates all threads and another that duplicates only the thread that invoked the fork() system call.
The exec() system call typically works in the same way as described in Chapter 3. That is, if a thread invokes the exec() system call, the program specified in the parameter to exec() will replace the entire process--including all threads.
Which of the two versions of fork() to use depends on the application. If exec() is called immediately after forking, then duplicating all threads is unnecessary, as the program specified in the parameters to exec() will replace the process. In this instance, duplicating only the calling thread is appropriate. If, however, the separate process does not call exec() after forking, the separate process should duplicate all threads.
4.6.2 Signal Handling
A signal is used in UNIX systems to notify a process that a particular event has occurred. A signal may be received either synchronously or asynchronously, depending on the source of and the reason for the event being signaled. All signals, whether synchronous or asynchronous, follow the same pattern:
- A signal is generated by the occurrence of a particular event.
- The signal is delivered to a process.
- Once delivered, the signal must be handled.
Examples of synchronous signals include illegal memory access and division by 0. If a running program performs either of these actions, a signal is generated. Synchronous signals are delivered to the same process that performed the operation that caused the signal (that is the reason they are considered synchronous).
When a signal is generated by an event external to a running process, that process receives the signal asynchronously. Examples of such signals include terminating a process with specific keystrokes (such as <control><C>) and having a timer expire. Typically, an asynchronous signal is sent to another process.
A signal may be handled by one of two possible handlers:
- A default signal handler
- A user-defined signal handler
Every signal has a default signal handler that the kernel runs when handling that signal. This default action can be overridden by a user-define signal handler that is called to handle the signal. Signals are handled in different ways. Some signals may be ignored, while others (for example, an illegal memory access) are handled by terminating the program.
Handling signals in single-threaded programs is straightforward: signals are always delivered to a process. However, delivering signals is more complicated in multithreaded programs, where a process may have several threads. Where, then, should a signal be delivered?
In general, the following options exist:
- Deliver the signal to the thread to which the signal applies.
- Deliver the signal to every thread in the process.
- Deliver the signal to certain threads in the process.
- Assign a specific thread to receive all signals for the process.
The method for delivering a signal depends on the type of signal generated. For example, synchronous signals need to be delivered to the thread causing the signal and not to other threads in the process. However, the situation with asynchronous signals is not as clear. Some asynchronous signals--such as a signal that terminates a process (<control><C>, for example)--should be sent to all threads.
The standard UNIX function for delivering a signal is

This function specifies the process (pid) to which a particular signal (signal) is to be delivered. Most multithreaded versions of UNIX allow a thread to specify which signals it will accept and which it will block. Therefore, in some cases, an asynchronous signal may be delivered only to those threads that are not blocking it. However, because signals need to be handled only once, a signal is typically delivered only to the first thread found that is not blocking it. POSIX Pthreads provides the following function, which allows a signal to be delivered to a specified thread (tid):
 Although Windows does not explicitly provide support for signals, it allows us to emulate them using asynchronous procedure calls (APCs). The APC facility enables a user thread to specify a function that is to be called when the user thread receives notification of a particular event. As indicatedby its name, an APC is roughly equivalent to an asynchronous signal in UNIX. However, whereas UNIX must contend with how to deal with signals in a multithreaded environment, the APC facility is more straightforward, since an APC is delivered to a particular thread rather than a process.
Although Windows does not explicitly provide support for signals, it allows us to emulate them using asynchronous procedure calls (APCs). The APC facility enables a user thread to specify a function that is to be called when the user thread receives notification of a particular event. As indicatedby its name, an APC is roughly equivalent to an asynchronous signal in UNIX. However, whereas UNIX must contend with how to deal with signals in a multithreaded environment, the APC facility is more straightforward, since an APC is delivered to a particular thread rather than a process.
4.6.3 Thread Cancellation
Thread cancellation involves terminating a thread before it has completed. For example, if multiple threads are concurrently searching through a database and one thread returns the result, the remaining threads might be canceled. Another situation might occur when a user presses a button on a web browser that stops a web page from loading any further. Often, a web page loads using several threads--each image is loaded in a separate thread. When a user presses the stop button on the browser, all threads loading the page are canceled.
A thread that is to be canceled is often referred to as the target thread. Cancellation of a target thread may occur in two different scenarios:
- Asynchronous cancellation. One thread immediately terminates the target thread.
- Deferred cancellation. The target thread periodically checks whether it should terminate, allowing it an opportunity to terminate itself in an orderly fashion.
The difficulty with cancellation occurs in situations where resources have been allocated to a canceled thread or where a thread is canceled while in the midst of updating data it is sharing with other threads. This becomes especially troublesome with asynchronous cancellation. Often, the operating system will reclaim system resources from a canceled thread but will not reclaim all resources. Therefore, canceling a thread asynchronously may not free a necessary system-wide resource.
With deferred cancellation, in contrast, one thread indicates that a target thread is to be canceled, but cancellation occurs only after the target thread has checked a flag to determine whether or not it should be canceled. The thread can perform this check at a point at which it can be canceled safely.
In Pthreads, thread cancellation is initiated using the pthread_cancel() function. The identifier of the target thread is passed as a parameter to the function. The following code illustrates creating--and then canceling--a thread:
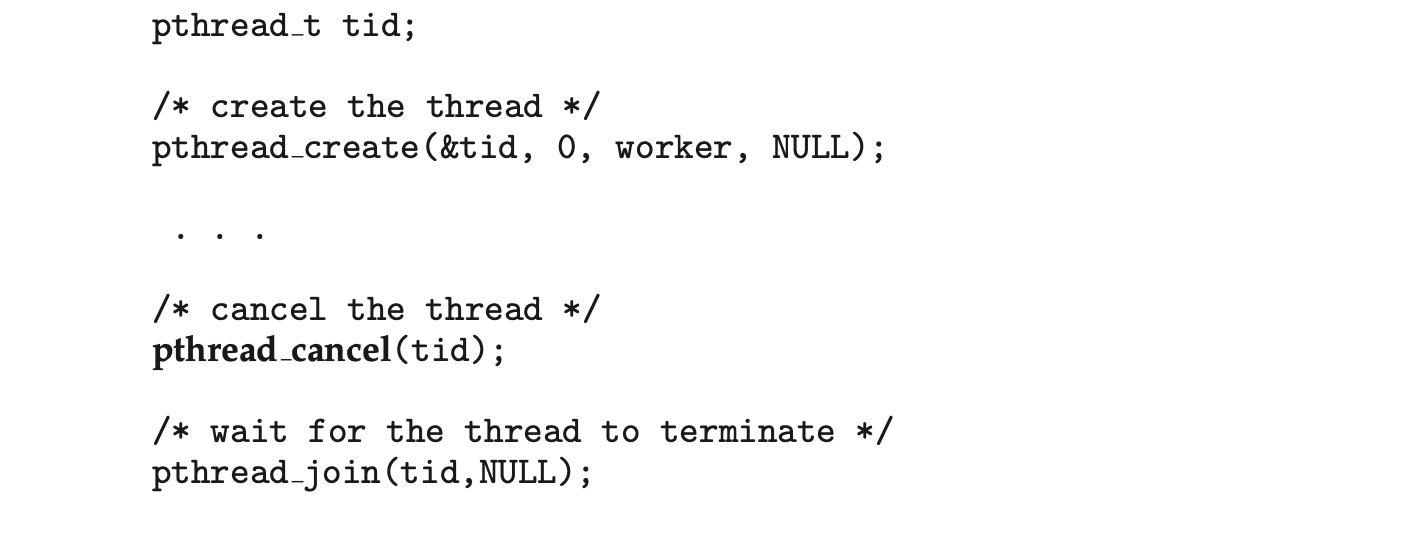
Invoking pthread_cancel()indicates only a request to cancel the target thread, however; actual cancellation depends on how the target thread is set up to handle the request. When the target thread is finally canceled, the call to pthread_join() in the canceling thread returns. Pthreads supports three cancellation modes. Each mode is defined as a state and a type, as illustrated in the table below. A thread may set its cancellation state and type using an API.

As the table illustrates, Pthreads allows threads to disable or enable cancellation. Obviously, a thread cannot be canceled if cancellation is disabled. However, cancellation requests remain pending, so the thread can later enable cancellation and respond to the request.
The default cancellation type is deferred cancellation. However, cancellation occurs only when a thread reaches a cancellation point. Most of the blocking system calls in the POSIX and standard C library are defined as cancellation points, and these are listed when invoking the command man pthreads on a Linux system. For example, the read() system call is a cancellation point that allows cancelling a thread that is blocked while awaiting input from read().
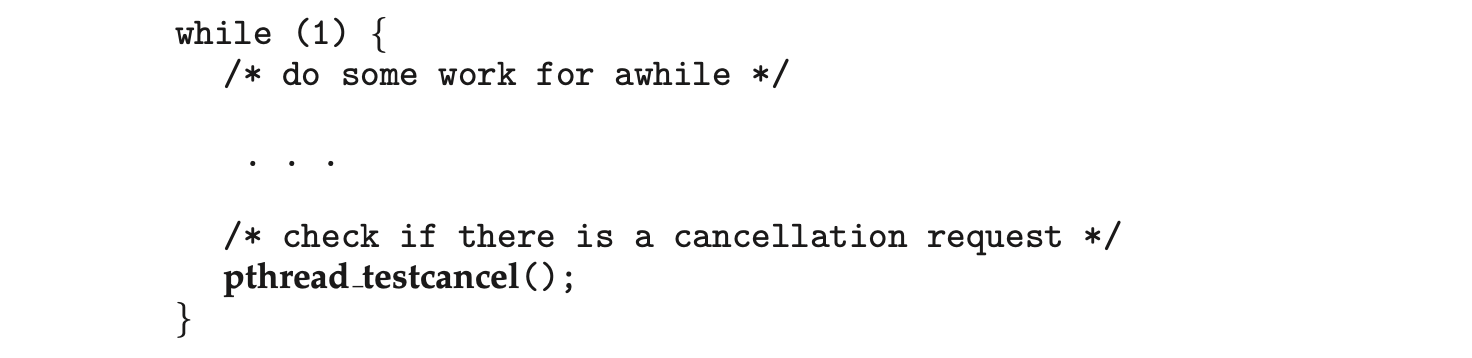
One technique for establishing a cancellation point is to invoke the pthread_testcancel() function. If a cancellation request is found to be pending, the call to pthread_testcancel() will not return, and the thread will terminate; otherwise, the call to the function will return, and the thread will continue to run. Additionally, Pthreads allows a function known as a cleanup handler to be invoked if a thread is canceled. This function allows any resources a thread may have acquired to be released before the thread is terminated.
The following code illustrates how a thread may respond to a cancellation request using deferred cancellation:
 Because of the issues described earlier, asynchronous cancellation is not recommended in Pthreads documentation. Thus, we do not cover it here. An interesting note is that on Linux systems, thread cancellation using the Pthreads API is handled through signals (Section 4.6.2).
Because of the issues described earlier, asynchronous cancellation is not recommended in Pthreads documentation. Thus, we do not cover it here. An interesting note is that on Linux systems, thread cancellation using the Pthreads API is handled through signals (Section 4.6.2).
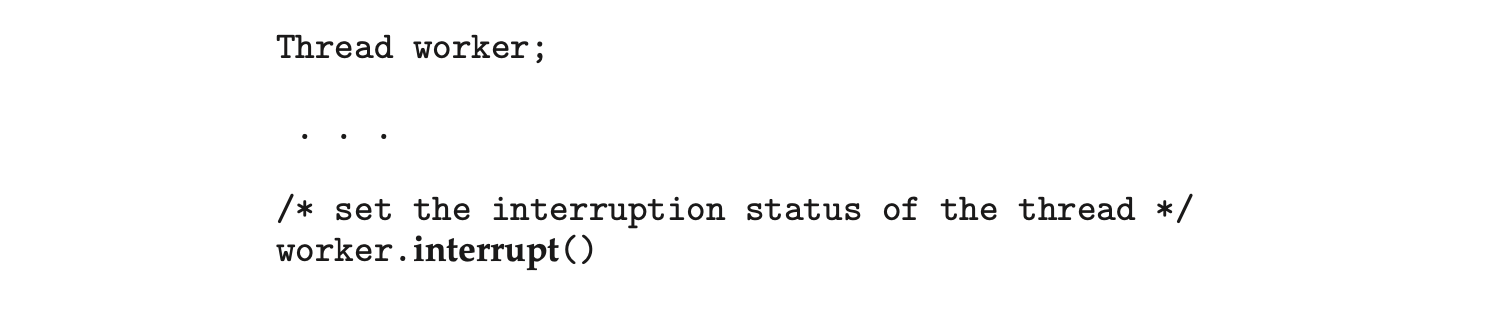
Thread cancellation in Java uses a policy similar to deferred cancellation in Pthreads. To cancel a Java thread, you invoke the interrupt() method, which sets the interruption status of the target thread to true:
 A thread can check its interruption status by invoking the isInterrupted() method, which returns a boolean value of a thread’s interruption status:
A thread can check its interruption status by invoking the isInterrupted() method, which returns a boolean value of a thread’s interruption status:

4.6.4 Thread-Local Storage
Threads belonging to a process share the data of the process. Indeed, this data sharing provides one of the benefits of multithreaded programming. However, in some circumstances, each thread might need its own copy of certain data. We will call such data thread-local storage (or TLS). For example, in a transaction-processing system, we might service each transaction in a separate thread. Furthermore, each transaction might be assigned a unique identifier. To associate each thread with its unique transaction identifier, we could use thread-local storage.
It is easy to confuse TLS with local variables. However, local variables are visible only during a single function invocation, whereas TLS data are visible across function invocations. Additionally, when the developer has no control over the thread creation process--for example, when using an implicit technique such as a thread pool--then an alternative approach is necessary.
In some ways, TLS is similar to static data; the difference is that TLS data are unique to each thread. (In fact, TLS is usually declared as static.) Most thread libraries and compilers provide support for TLS. For example, Java provides a ThreadLocal<T> class with set() and get() methods for ThreadLocal<T> objects. Pthreads includes the type pthread_key_t, which provides a key that is specific to each thread. This key can then be used to access TLS data. Microsoft's C# language simply requires adding the storage attribute [ThreadStatic] to declare thread-local data. The gcc compiler provides the storage class keyword __thread for declaring TLS data. For example, if we wished to assign a unique identifier for each thread, we would declare it as follows:

4.6.5 Scheduler Activations
A final issue to be considered with multithreaded programs concerns communication between the kernel and the thread library, which may be requiredby the many-to-many and two-level models discussed in Section 4.3.3. Such coordination allows the number of kernel threads to be dynamically adjusted to help ensure the best performance.
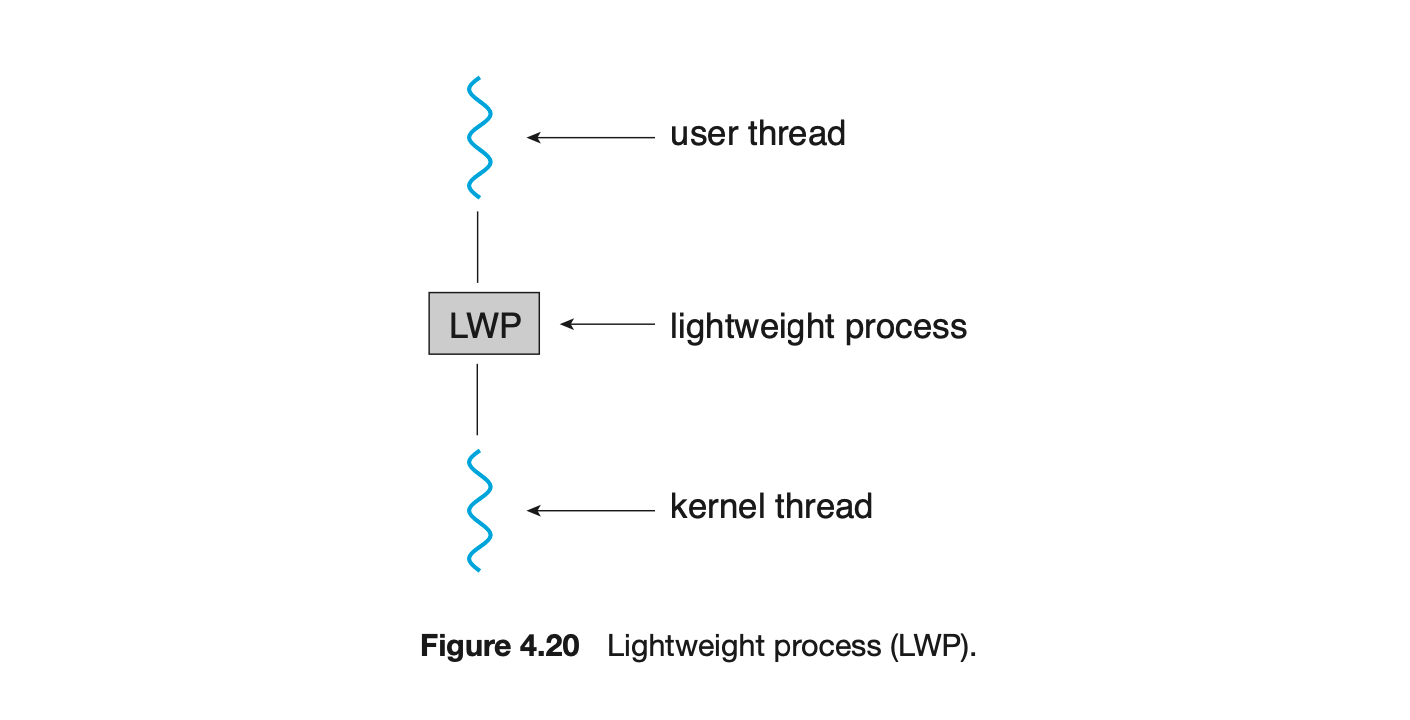
Many systems implementing either the many-to-many or the two-level model place an intermediate data structure between the user and kernel threads. This data structure--typically known as a lightweight process, or LWP--is shown in Figure 4.20. To the user-thread library, the LWP appears to be a virtual processor on which the application can schedule a user thread to run. Each LWP is attached to a kernel thread, and it is kernel threads that the operating system schedules to run on physical processors. If a kernel thread blocks (such as while waiting for an I/O operation to complete), the LWP blocks as well. Up the chain, the user-level thread attached to the LWP also blocks.
An application may require any number of LWPs to run efficiently. Consider a CPU-bound application running on a single processor. In this scenario, only one thread can run at a time, so one LWP is sufficient. An application that is I/O-intensive may require multiple LWPs to execute, however. Typically, an LWP is required for each concurrent blocking system call. Suppose, for example, that five different file-read requests occur simultaneously. Five LWPs are needed, because all could be waiting for I/O completion in the kernel. If a process has only four LWPs, then the fifth request must wait for one of the LWPs to return from the kernel.
One scheme for communication between the user-thread library and the kernel is known as scheduler activation. It works as follows: The kernel provides an application with a set of virtual processors (LWPs), and the application can schedule user threads onto an available virtual processor. Furthermore, the kernel must inform an application about certain events. This procedure is known as an upcall. Upcalls are handled by the thread library with an upcall handler, and upcall handlers must run on a virtual processor.
 One event that triggers an upcall occurs when an application thread is about to block. In this scenario, the kernel makes an upcall to the application informing it that a thread is about to block and identifying the specific thread. The kernel then allocates a new virtual processor to the application. The application runs an upcall handler on this new virtual processor, which saves the state of the blocking thread and relinquishes the virtual processor on which the blocking thread is running. The upcall handler then schedules another thread that is eligible to run on the new virtual processor. When the event that the blocking thread was waiting for occurs, the kernel makes another upcall to the thread library informing it that the previously blocked thread is now eligible to run. The upcall handler for this event also requires a virtual processor, and the kernel may allocate a new virtual processor or preempt one of the user threads and run the upcall handler on its virtual processor. After marking the unblocked thread as eligible to run, the application schedules an eligible thread to run on an available virtual processor.
One event that triggers an upcall occurs when an application thread is about to block. In this scenario, the kernel makes an upcall to the application informing it that a thread is about to block and identifying the specific thread. The kernel then allocates a new virtual processor to the application. The application runs an upcall handler on this new virtual processor, which saves the state of the blocking thread and relinquishes the virtual processor on which the blocking thread is running. The upcall handler then schedules another thread that is eligible to run on the new virtual processor. When the event that the blocking thread was waiting for occurs, the kernel makes another upcall to the thread library informing it that the previously blocked thread is now eligible to run. The upcall handler for this event also requires a virtual processor, and the kernel may allocate a new virtual processor or preempt one of the user threads and run the upcall handler on its virtual processor. After marking the unblocked thread as eligible to run, the application schedules an eligible thread to run on an available virtual processor.
4.7 Operating-System Examples
At this point, we have examined a number of concepts and issues related to threads. We conclude the chapter by exploring how threads are implemented in Windows and Linux systems.
4.7.1 Windows Threads
A Windows application runs as a separate process, and each process may contain one or more threads. The Windows API for creating threads is covered in Section 4.4.2. Additionally, Windows uses the one-to-one mapping described in Section 4.3.2, where each user-level thread maps to an associated kernel thread.
The general components of a thread include:
- A thread id uniquely identifying the thread
- A register set representing the status of the processor
- A program counter
- A user stack, employed when the thread is running in user mode, and a kernel stack, employed when the thread is running in kernel mode
- A private storage area used by various run-time libraries and dynamic link libraries (DLLs)
The register set, stacks, and private storage area are known as the context of the thread.
The primary data structures of a thread include:
- ETHREAD--executive thread block
- KTHREAD--kernel thread block
- TEB--thread environment block
The key components of the ETHREAD include a pointer to the process to which the thread belongs and the address of the routine in which the thread starts control. The ETHREAD also contains a pointer to the corresponding KTHREAD.
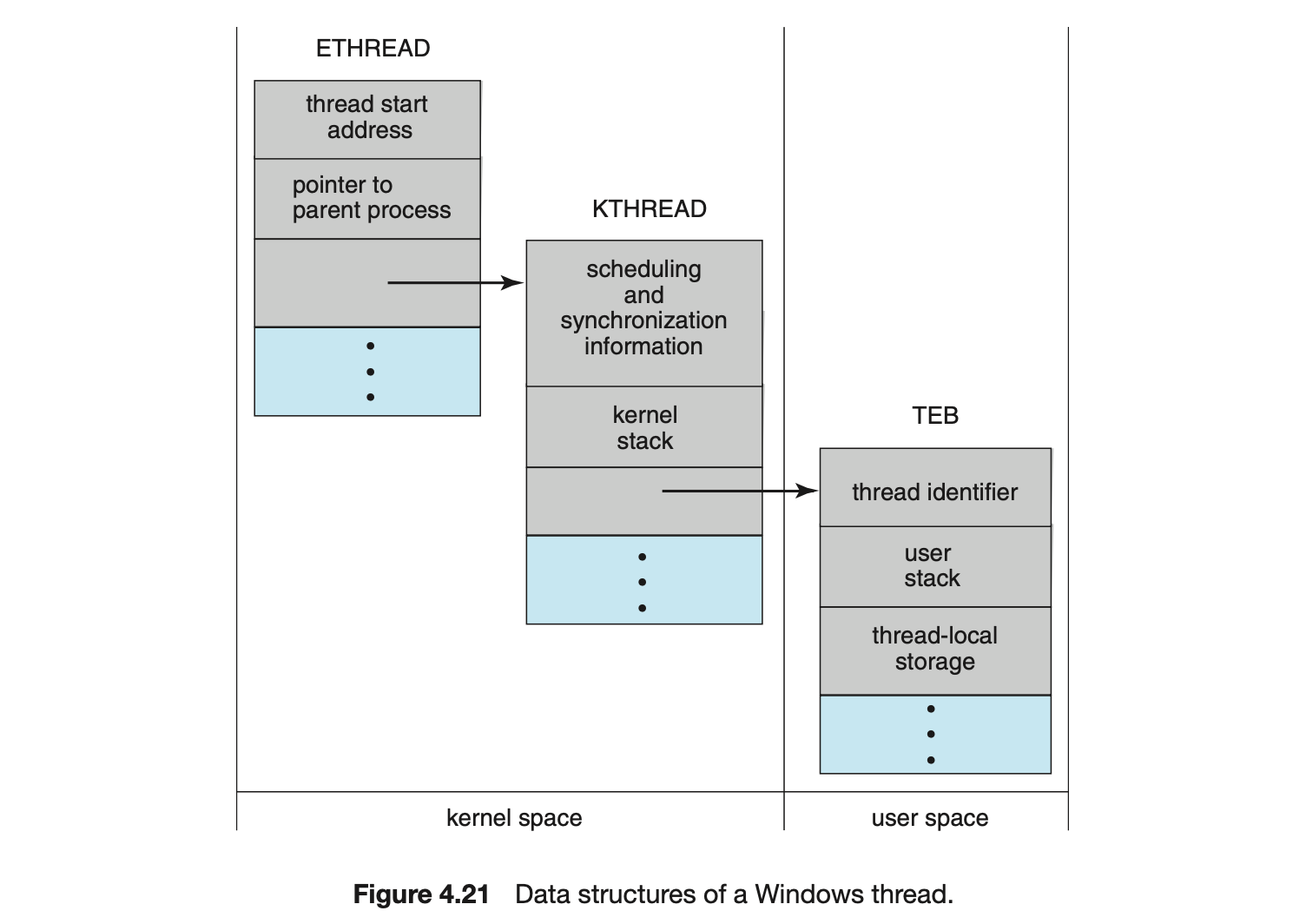
The KTHREAD includes scheduling and synchronization information for the thread. In addition, the KTHREAD includes the kernel stack (used when the thread is running in kernel mode) and a pointer to the TEB.
The ETHREAD and the KTHREAD exist entirely in kernel space; this means that only the kernel can access them. The TEB is a user-space data structure that is accessed when the thread is running in user mode. Among other fields, the TEB contains the thread identifier, a user-mode stack, and an array for thread-local storage. The structure of a Windows thread is illustrated in Figure 4.21.
4.7.2 Linux Threads
Linux provides the fork() system call with the traditional functionality of duplicating a process, as described in Chapter 3. Linux also provides the ability to create threads using the clone() system call. However, Linux does not distinguish between processes and threads. In fact, Linux uses the term task --rather than process or thread-- when referring to a flow of control within a program.
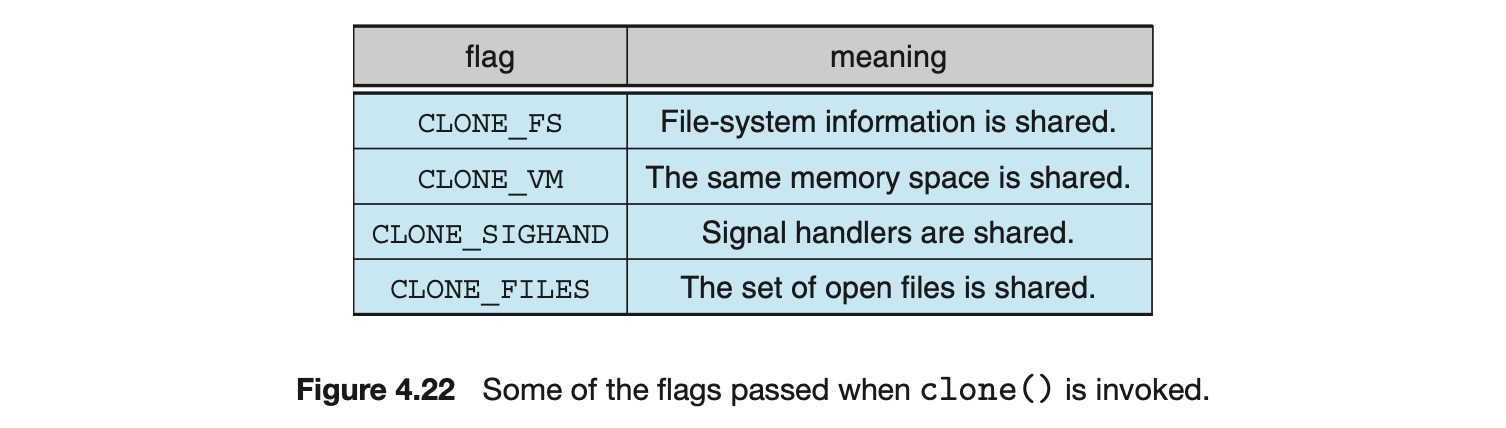
When clone() is invoked, it is passed a set of flags that determine how much sharing is to take place between the parent and child tasks. Some of these flags are listed in Figure 4.22. For example, suppose that clone() is passed the flags CLONE_FS, CLONE_VM, CLONE_SIGHAND, and CLONE_FILES. The parent and child tasks will then share the same file-system information (such as the current working directory), the same memory space, the same signal handlers, and the same set of open files. Using clone() in this fashion is equivalent to creating a thread as described in this chapter, since the parent task shares most of its resources with its child task. However, if none of these flags is set when clone() is invoked, no sharing takes place, resulting in functionality similar to that provided by the fork() system call.
The varying level of sharing is possible because of the way a task is represented in the Linux kernel. A unique kernel data structure (specifically, struct task_struct) exists for each task in the system. This data structure, instead of storing data for the task, contains pointers to other data structures where these data are stored--for example, data structures that represent the list of open files, signal-handling information, and virtual memory. When fork() is invoked, a new task is created, along with a copy of all the associated data structures of the parent process. A new task is also created when the clone() system call is made. However, rather than copying all data structures, the new task points to the data structures of the parent task, depending on the set of flags passed to clone().
Finally, the flexibility of the clone() system call can be extended to the concept of containers, a virtualization topic which was introduced in Chapter 1. Recall from that chapter that a container is a virtualization technique provided by the operating system that allows creating multiple Linux systems (containers) under a single Linux kernel that run in isolation to one another. Just as certain flags passed to clone() can distinguish between creating a task that behaves more like a process or a thread based upon the amount of sharing between the parent and child tasks, there are other flags that can be passed to clone() that allow a Linux container to be created. Containers will be covered more fully in Chapter 18.
4.8 Summary
- A thread represents a basic unit of CPU utilization, and threads belonging to the same process share many of the process resources, including code and data.
- There are four primary benefits to multithreaded applications: (1) responsiveness, (2) resource sharing, (3) economy, and (4) scalability.
- Concurrency exists when multiple threads are making progress, whereas parallelism exists when multiple threads are making progress simulta-neously. On a system with a single CPU, only concurrency is possible; parallelism requires a multicore system that provides multiple CPUs.
- There are several challenges in designing multithreaded applications. They include dividing and balancing the work, dividing the data between the different threads, and identifying any data dependencies. Finally, multithreaded programs are especially challenging to test and debug.
- Data parallelism distributes subsets of the same data across different computing cores and performs the same operation on each core. Task parallelism distributes not data but tasks across multiple cores. Each task is running a unique operation.
- User applications create user-level threads, which must ultimately be mapped to kernel threads to execute on a CPU. The many-to-one model maps many user-level threads to one kernel thread. Other approaches include the one-to-one and many-to-many models.
- A thread library provides an API for creating and managing threads. Three common thread libraries include Windows, Pthreads, and Java threading. Windows is for the Windows system only, while Pthreads is available for POSIX-compatible systems such as UNIX, Linux, and macOS. Java threads will run on any system that supports a Java virtual machine.
- Implicit threading involves identifying tasks--not threads--and allowing languages or API frameworks to create and manage threads. There are several approaches to implicit threading, including thread pools, fork-join frameworks, and Grand Central Dispatch. Implicit threading is becoming an increasingly common technique for programmers to use in developing concurrent and parallel applications.
- Threads may be terminated using either asynchronous or deferred cancellation. Asynchronous cancellation stops a thread immediately, even if it is in the middle of performing an update. Deferred cancellation informs a thread that it should terminate but allows the thread to terminate in an orderly fashion. In most circumstances, deferred cancellation is preferred to asynchronous termination.
- Unlike many other operating systems, Linux does not distinguish between processes and threads; instead, it refers to each as a task. The Linux clone() system call can be used to create tasks that behave either more like processes or more like threads.
Practice Exercises
4.1 Provide three programming examples in which multithreading provides better performance than a single-threaded solution.
4.2 Using Amdahl's Law, calculate the speedup gain of an application that has a 60 percent parallel component for (a) two processing cores and (b) four processing cores.
4.3 Does the multithreaded web server described in Section 4.1 exhibit task or data parallelism?
4.4 What are two differences between user-level threads and kernel-level threads? Under what circumstances is one type better than the other?
4.5 Describe the actions taken by a kernel to context-switch between kernel-level threads.
4.6 What resources are used when a thread is created? How do they differ from those used when a process is created?
4.7 Assume that an operating system maps user-level threads to the kernel using the many-to-many model and that the mapping is done through LWPs. Furthermore, the system allows developers to create real-time threads for use in real-time systems. Is it necessary to bind a real-time thread to an LWP? Explain.
Further Reading
[Vahalia (1996)] covers threading in several versions of UNIX. [McDougall and Mauro (2007)] describes developments in threading the Solaris kernel. [Russinovich et al. (2017)] discuss threading in the Windows operating system family. [Mauerer (2008)] and [Love (2010)] explain how Linux handles threading, and [Levin (2013)] covers threads in macOS and iOS. [Herlihy and Shavit (2012)] covers parallelism issues on multicore systems. [Aubanel (2017)] covers parallelism of several different algorithms.
Bibliography
-
[Aubanel (2017)] E. Aubanel, Elements of Parallel Computing, CRC Press (2017).
-
[Herlihy and Shavit (2012)] M. Herlihy and N. Shavit, The Art of Multiprocessor Programming, Revised First Edition, Morgan Kaufmann Publishers Inc. (2012).
-
[Levin (2013)] J. Levin, Mac OS X and iOS Internals to the Apple's Core, Wiley (2013).
-
[Love (2010)] R. Love, Linux Kernel Development, Third Edition, Developer's Library (2010).
-
[Mauerer (2008)] W. Mauerer, Professional Linux Kernel Architecture, John Wiley and Sons (2008).
-
[McDougall and Mauro (2007)] R. McDougall and J. Mauro, Solaris Internals, Second Edition, Prentice Hall (2007).
-
[Russinovich et al. (2017)] M. Russinovich, D. A. Solomon, and A. Ionescu, Windows InternalsPart 1, Seventh Edition, Microsoft Press (2017).
-
[Vahalia (1996)] U. Vahalia, Unix Internals: The New Frontiers, Prentice Hall (1996).
Chapter 4 Exercises
4.8 Provide two programming examples in which multithreading does not provide better performance than a single-threaded solution. 4.9 Under what circumstances does a multithreaded solution using multiple kernel threads provide better performance than a single-threaded solution on a single-processor system? 4.10 Which of the following components of program state are shared across threads in a multithreaded process?
- Register values
- Heap memory
- Global variables
- Stack memory
4.11 Can a multithreaded solution using multiple user-level threads achieve better performance on a multiprocessor system than on a single-processor system? Explain. 4.12 In Chapter 3, we discussed Google's Chrome browser and its practice of opening each new tab in a separate process. Would the same benefits have been achieved if, instead, Chrome had been designed to open each new tab in a separate thread? Explain. 4.13 Is it possible to have concurrency but not parallelism? Explain. 4.14 Using Amdahl's Law, calculate the speedup gain for the following applications:
- 40 percent parallel with (a) eight processing cores and (b) sixteen processing cores
- 67 percent parallel with (a) two processing cores and (b) four processing cores
- 90 percent parallel with (a) four processing cores and (b) eight processing cores
4.15 Determine if the following problems exhibit task or data parallelism:
- Using a separate thread to generate a thumbnail for each photo in a collection
- Transposing a matrix in parallel
- A networked application where one thread reads from the network and another writes to the network
- The fork-join array summation application described in Section 4.5.2
- The Grand Central Dispatch system
4.16 A system with two dual-core processors has four processors available for scheduling. A CPU-intensive application is running on this system. All input is performed at program start-up, when a single file must be opened. Similarly, all output is performed just before the program terminates, when the program results must be written to a single file. Between start-up and termination, the program is entirely CPU-bound. Your task is to improve the performance of this application by multithreading it. The application runs on a system that uses the one-to-one threading model (each user thread maps to a kernel thread).
- How many threads will you create to perform the input and output? Explain.
- How many threads will you create for the CPU-intensive portion of the application? Explain.
4.17 Consider the following code segment:
a.How many unique processes are created?
b.How many unique threads are created?
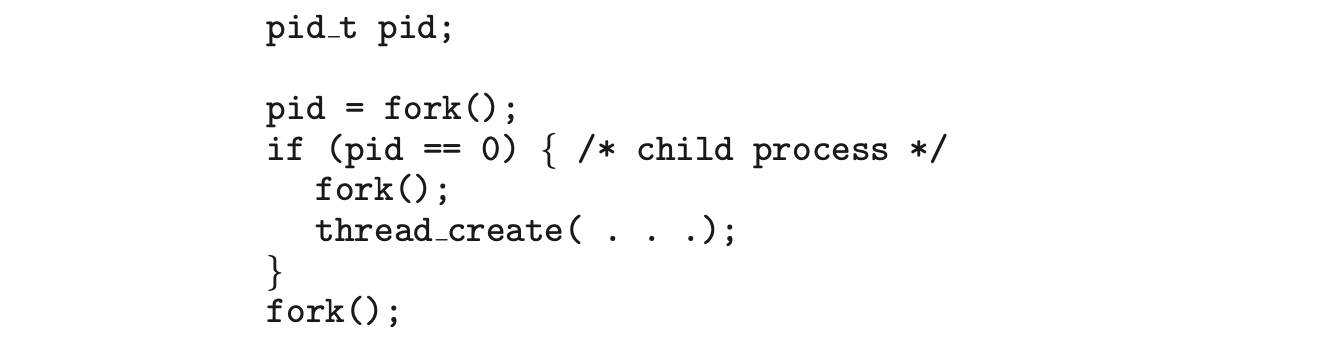
4.18 As described in Section 4.7.2, Linux does not distinguish between processes and threads. Instead, Linux treats both in the same way, allowing a task to be more akin to a process or a thread depending on the set of flags passed to the clone() system call. However, other operating systems, such as Windows, treat processes and threads differently. Typically, such systems use a notation in which the data structure for a process contains pointers to the separate threads belonging to the process. Contrast these two approaches for modeling processes and threads within the kernel.
4.19 The program shown in Figure 4.23 uses the Pthreads API. What would be the output from the program at LINE C and LINE P?
4.20 Consider a multicore system and a multithreaded program written using the many-to-many threading model. Let the number of user-level threads in the program be greater than the number of processing cores in the system. Discuss the performance implications of the following scenarios.
a. The number of kernel threads allocated to the program is less than the number of processing cores.
b. The number of kernel threads allocated to the program is equal to the number of processing cores.
c. The number of kernel threads allocated to the program is greater than the number of processing cores but less than the number of user-level threads.
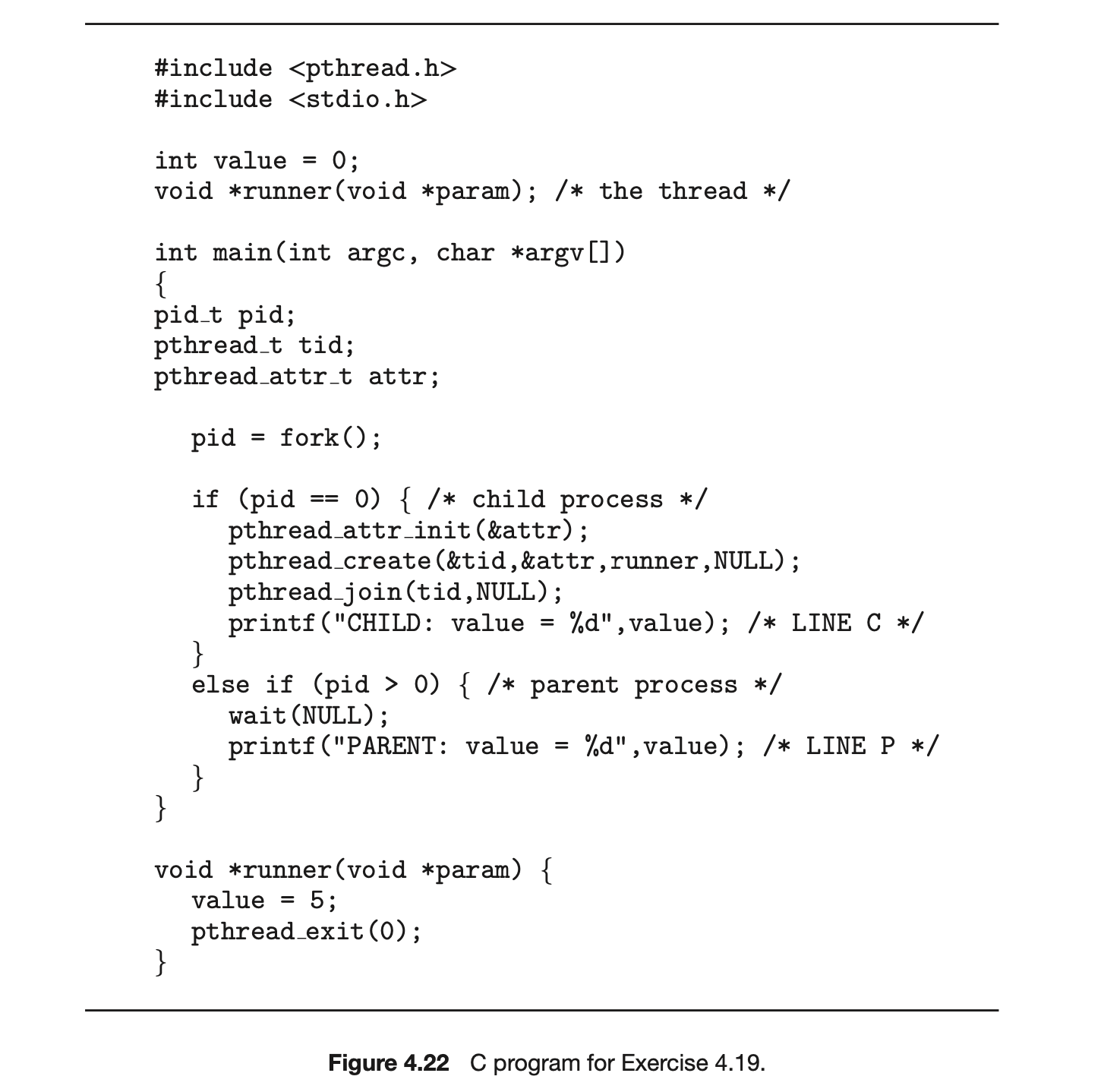 4.21 Pthreads provides an API for managing thread cancellation. The pthread setcancelstate() function is used to set the cancellation state. Its prototype appears as follows:
4.21 Pthreads provides an API for managing thread cancellation. The pthread setcancelstate() function is used to set the cancellation state. Its prototype appears as follows:
 The two possible values for the state are
The two possible values for the state are PTHREAD_CANCEL_ENABLE and PTHREAD_CANCEL_DISABLE.
Using the code segment shown in Figure 4.24, provide examples of two operations that would be suitable to perform between the calls to disable and enable thread cancellation.
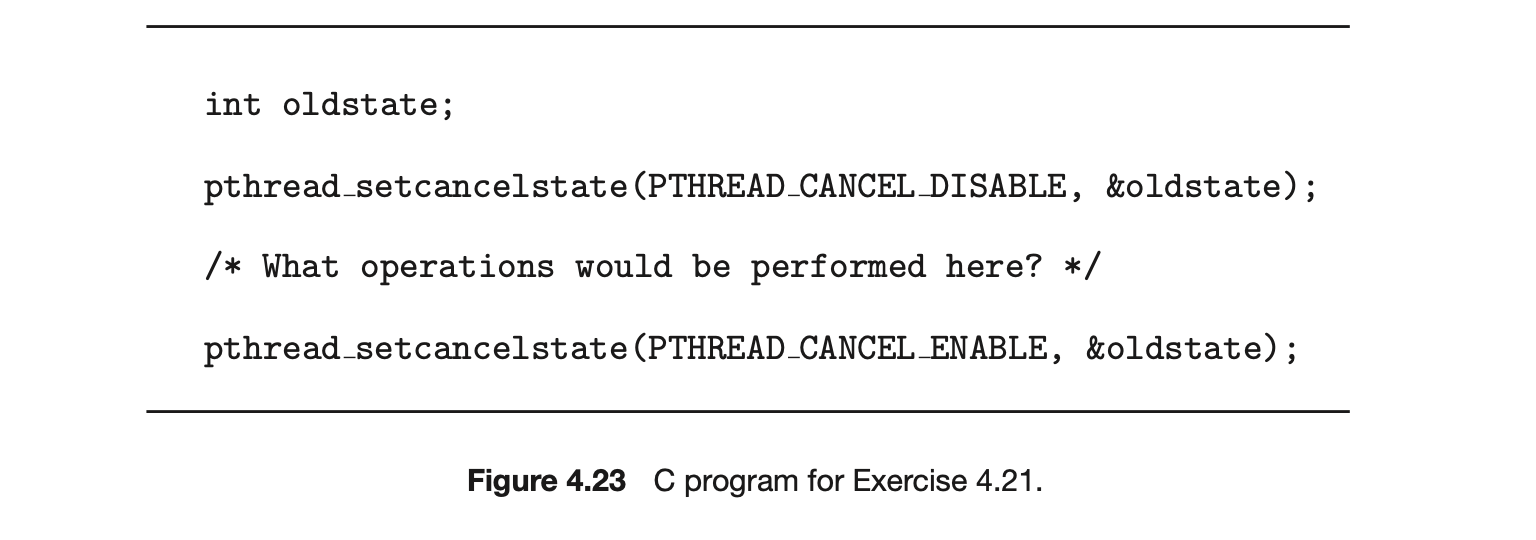
4.22 Write a multithreaded program that calculates various statistical values for a list of numbers. This program will be passed a series of numbers on the command line and will then create three separate worker threads. One thread will determine the average of the numbers, the second will determine the maximum value, and the third will determine the minimum value. For example, suppose your program is passed the integers
 The program will report
The program will report
 The variables representing the average, minimum, and maximum values will be stored globally. The worker threads will set these values, and the parent thread will output the values once the workers have exited. (We could obviously expand this program by creating additional threads that determine other statistical values, such as median and standard deviation.)
The variables representing the average, minimum, and maximum values will be stored globally. The worker threads will set these values, and the parent thread will output the values once the workers have exited. (We could obviously expand this program by creating additional threads that determine other statistical values, such as median and standard deviation.)
4.23 Write a multithreaded program that outputs prime numbers. This program should work as follows: The user will run the program and will enter a number on the command line. The program will then create a separate thread that outputs all the prime numbers less than or equal to the number entered by the user.
4.24 An interesting way of calculating is to use a technique known as Monte Carlo, which involves randomization. This technique works as follows:
Suppose you have a circle inscribed within a square, as shown in Figure 4.25. (Assume that the radius of this circle is .)
- First, generate a series of random points as simple coordinates. These points must fall within the Cartesian coordinates that bound the square. Of the total number of random points that are generated, some will occur within the circle.
- Next, estimate by performing the following calculation:
 Write a multithreaded version of this algorithm that creates a separate thread to generate a number of random points. The thread will count the number of points that occur within the circle and store that result in a global variable. When this thread has exited, the parent thread will calculate and output the estimated value of . It is worth experimenting with the number of random points generated. As a general rule, the greater the number of points, the closer the approximation to .
Write a multithreaded version of this algorithm that creates a separate thread to generate a number of random points. The thread will count the number of points that occur within the circle and store that result in a global variable. When this thread has exited, the parent thread will calculate and output the estimated value of . It is worth experimenting with the number of random points generated. As a general rule, the greater the number of points, the closer the approximation to .
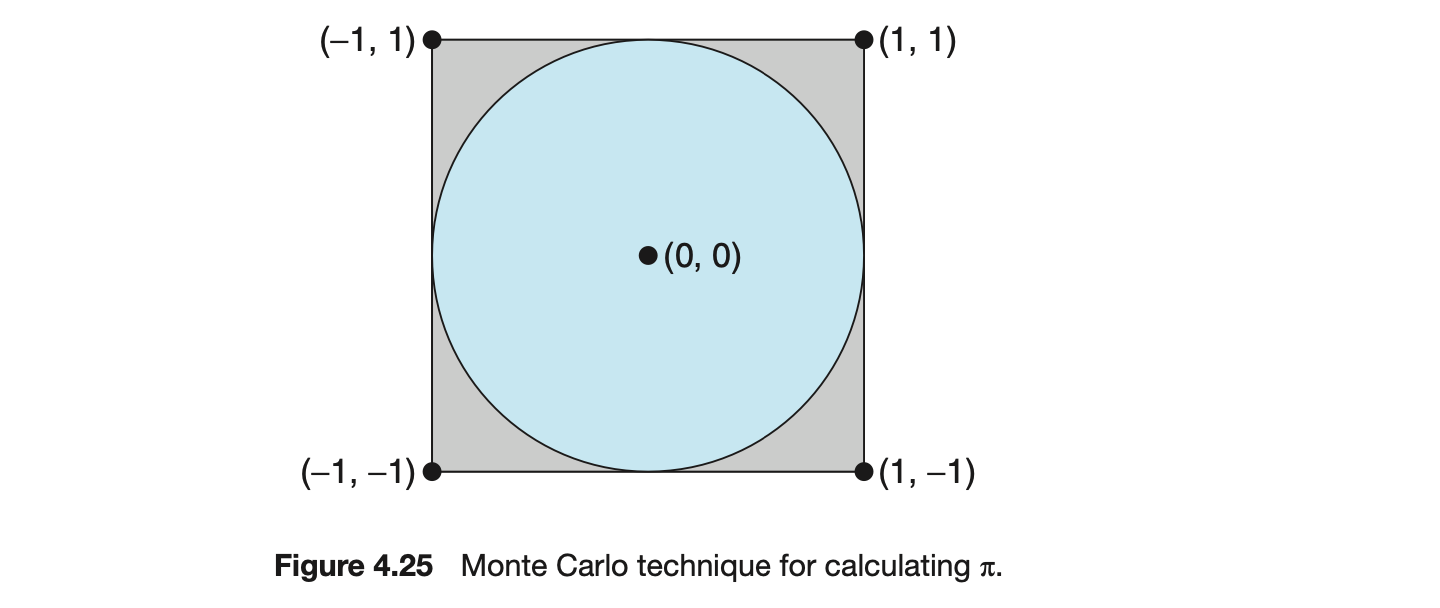
In the source-code download for this text, you will find a sample program that provides a technique for generating random numbers, as well as determining if the random point occurs within the circle.
Readers interested in the details of the Monte Carlo method for estimating should consult the bibliography at the end of this chapter. In Chapter 6, we modify this exercise using relevant material from that chapter.
4.25 Repeat Exercise 4.24, but instead of using a separate thread to generate random points, use OpenMP to parallelize the generation of points. Be careful not to place the calculation of in the parallel region, since you want to calculate only once.
4.26 Modify the socket-based date server (Figure 3.27) in Chapter 3 so that the server services each client request in a separate thread.
4.27 The Fibonacci sequence is the series of numbers Formally, it can be expressed as:
 Write a multithreaded program that generates the Fibonacci sequence. This program should work as follows: On the command line, the user will enter the number of Fibonacci numbers that the program is to generate. The program will then create a separate thread that will generate the Fibonacci numbers, placing the sequence in data that can be shared by the threads (an array is probably the most convenient data structure). When the thread finishes execution, the parent thread will output the sequence generated by the child thread. Because the parent thread cannot begin outputting the Fibonacci sequence until the child thread finishes, the parent thread will have to wait for the child thread to finish. Use the techniques described in Section 4.4 to meet this requirement.
Write a multithreaded program that generates the Fibonacci sequence. This program should work as follows: On the command line, the user will enter the number of Fibonacci numbers that the program is to generate. The program will then create a separate thread that will generate the Fibonacci numbers, placing the sequence in data that can be shared by the threads (an array is probably the most convenient data structure). When the thread finishes execution, the parent thread will output the sequence generated by the child thread. Because the parent thread cannot begin outputting the Fibonacci sequence until the child thread finishes, the parent thread will have to wait for the child thread to finish. Use the techniques described in Section 4.4 to meet this requirement.
4.28 Modify programming problem Exercise 3.20 from Chapter 3, which asks you to design a pid manager. This modification will consist of writing a multithreaded program that tests your solution to Exercise 3.20. You will create a number of threads--for example, 100--and each thread will request a pid, sleep for a random period of time, and then release the pid. (Sleeping for a random period of time approximates the typical pid usage in which a pid is assigned to a new process, the process executes and then terminates, and the pid is released on the process's termination.) On UNIX and Linux systems, sleeping is accomplished through the sleep() function, which is passed an integer value representing the number of seconds to sleep. This problem will be modified in Chapter 7.
4.29 Exercise 3.25 in Chapter 3 involves designing an echo server using the Java threading API. This server is single-threaded, meaning that the server cannot respond to concurrent echo clients until the current client exits. Modify the solution to Exercise 3.25 so that the echo server services each client in a separate request.
Programming Projects
Project 1--Sudoku Solution Validator
A Sudoku puzzle uses a grid in which each column and row, as well as each of the nine subgrids, must contain all of the digits . Figure 4.26 presents an example of a valid Sudoku puzzle. This project consists of designing a multithreaded application that determines whether the solution to a Sudoku puzzle is valid.
There are several different ways of multithreading this application. One suggested strategy is to create threads that check the following criteria:
- A thread to check that each column contains the digits 1 through 9
- A thread to check that each row contains the digits 1 through 9
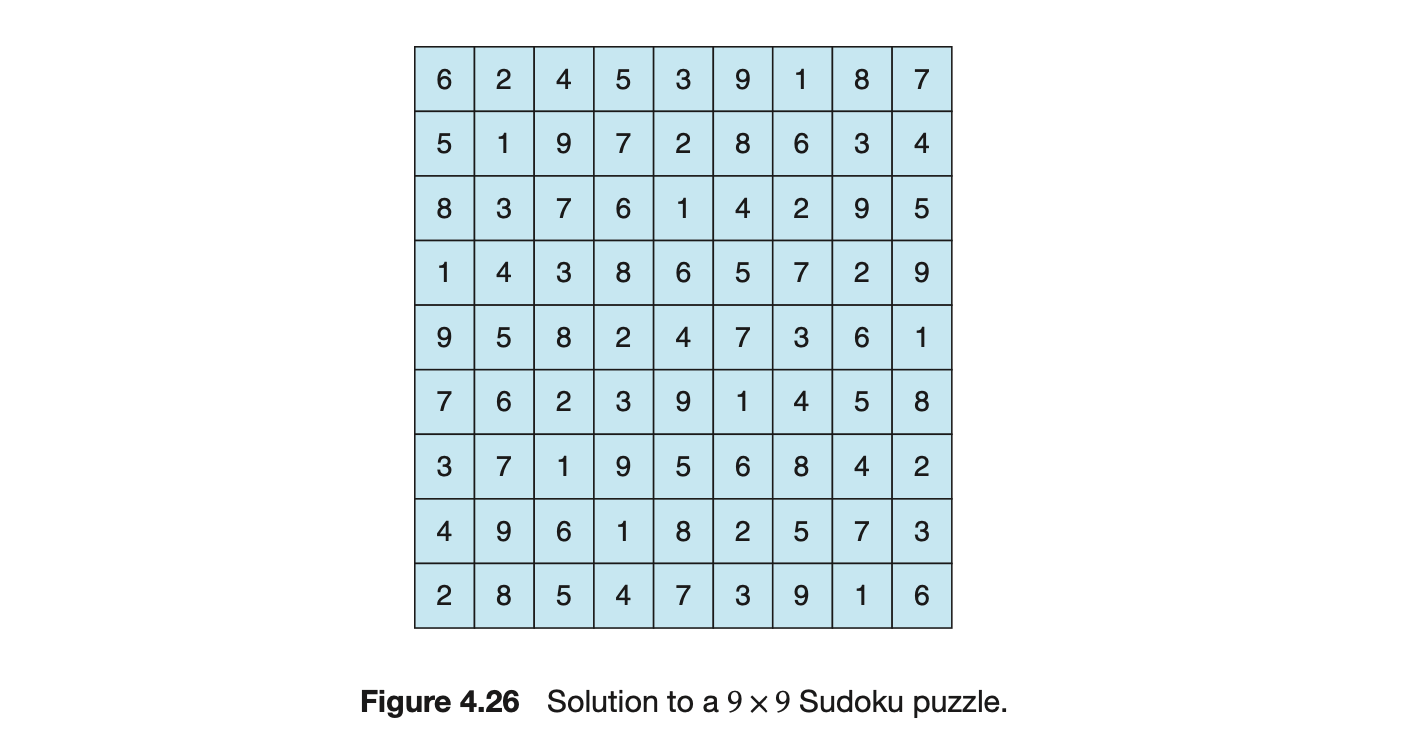
- Nine threads to check that each of the subgrids contains the digits 1 through 9
This would result in a total of eleven separate threads for validating a Sudoku puzzle. However, you are welcome to create even more threads for this project. For example, rather than creating one thread that checks all nine columns, you could create nine separate threads and have each of them check one column.
I. Passing Parameters to Each Thread
The parent thread will create the worker threads, passing each worker the location that it must check in the Sudoku grid. This step will require passing several parameters to each thread. The easiest approach is to create a data structure using a struct. For example, a structure to pass the row and column where a thread must begin validating would appear as follows:
 Both Pthreads and Windows programs will create worker threads using a strategy similar to that shown below:
Both Pthreads and Windows programs will create worker threads using a strategy similar to that shown below:

The data pointer will be passed to either the pthread_create() (Pthreads) function or the CreateThread() (Windows) function, which in turn will pass it as a parameter to the function that is to run as a separate thread.
II. Returning Results to the Parent Thread
Each worker thread is assigned the task of determining the validity of a particular region of the Sudoku puzzle. Once a worker has performed this check, it must pass its results back to the parent. One good way to handle this is to create an array of integer values that is visible to each thread. The index in this array corresponds to the worker thread. If a worker sets its corresponding value to 1, it is indicating that its region of the Sudoku puzzle is valid. A value of 0 indicates otherwise. When all worker threads have completed, the parent thread checks each entry in the result array to determine if the Sudoku puzzle is valid.
Project 2--Multithreaded Sorting Application
Write a multithreaded sorting program that works as follows: A list of integers is divided into two smaller lists of equal size. Two separate threads (which we will term sorting threads) sort each sublist using a sorting algorithm of your choice. The two sublists are then merged by a third thread--a merging thread --which merges the two sublists into a single sorted list.
Because global data are shared across all threads, perhaps the easiest way to set up the data is to create a global array. Each sorting thread will work on one half of this array. A second global array of the same size as the unsorted integer array will also be established. The merging thread will then merge the two sublists into this second array. Graphically, this program is structured as in Figure 4.27.
This programming project will require passing parameters to each of the sorting threads. In particular, it will be necessary to identify the starting index from which each thread is to begin sorting. Refer to the instructions in Project 1 for details on passing parameters to a thread.
The parent thread will output the sorted array once all sorting threads have exited.
Project 3--Fork-Join Sorting Application
Implement the preceding project (Multithreaded Sorting Application) using Java's fork-join parallelism API. This project will be developed in two different versions. Each version will implement a different divide-and-conquer sorting algorithm:
- Quicksort
- Mergesort
The Quicksort implementation will use the Quicksort algorithm for dividing the list of elements to be sorted into a left half and a right half based on the position of the pivot value. The Mergesort algorithm will divide the list into two evenly sized halves. For both the Quicksort and Mergesort algorithms, when the list to be sorted falls within some threshold value (for example, the list is size 100 or fewer), directly apply a simple algorithm such as the Selection or Insertion sort. Most data structures texts describe these two well-known, divide-and-conquer sorting algorithms.
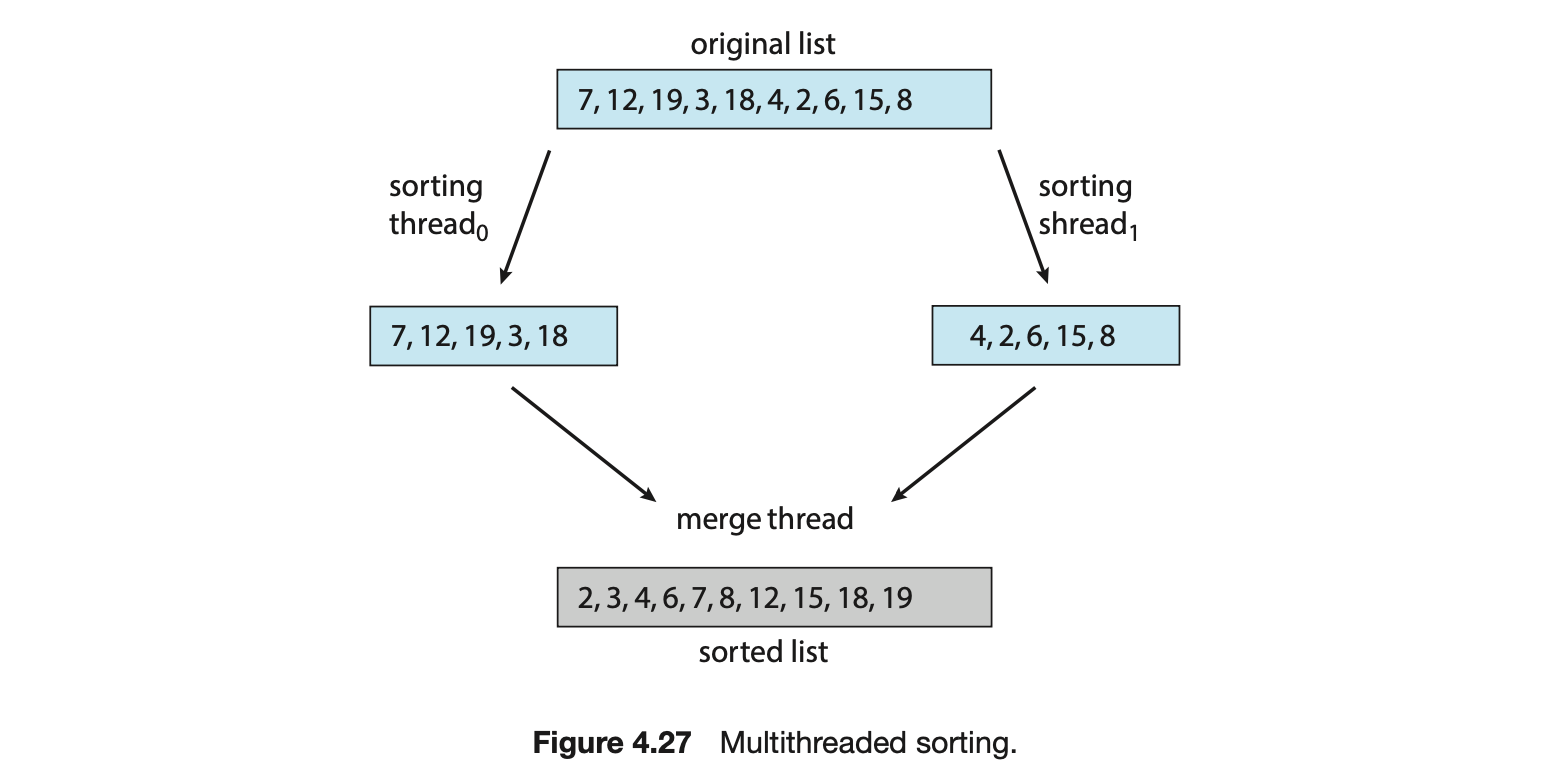
The class SumTask shown in Section 4.5.2.1 extends RecursiveTask, which is a result-bearing ForkJoinTask. As this assignment will involve sorting the array that is passed to the task, but not returning any values, you will instead create a class that extends RecursiveAction, a non result-bearing ForkJoinTask (see Figure 4.19).
The objects passed to each sorting algorithm are required to implement Java's Comparable interface, and this will need to be reflected in the class definition for each sorting algorithm. The source code download for this text includes Java code that provides the foundations for beginning this project.
Synchronization Tools
A cooperating process is one that can affect or be affected by other processes executing in the system. Cooperating processes can either directly share a logical address space (that is, both code and data) or be allowed to share data only through shared memory or message passing. Concurrent access to shared data may result in data inconsistency, however. In this chapter, we discuss various mechanisms to ensure the orderly execution of cooperating processes that share a logical address space, so that data consistency is maintained.
Chapter Objectives
- Describe the critical-section problem and illustrate a race condition.
- Illustrate hardware solutions to the critical-section problem using memory barriers, compare-and-swap operations, and atomic variables.
- Demonstrate how mutex locks, semaphores, monitors, and condition variables can be used to solve the critical-section problem.
- Evaluate tools that solve the critical-section problem in low-, moderate-, and high-contention scenarios.
6.1 Background
We've already seen that processes can execute concurrently or in parallel. Section 3.2.2 introduced the role of process scheduling and described how the CPU scheduler switches rapidly between processes to provide concurrent execution. This means that one process may only partially complete execution before another process is scheduled. In fact, a process may be interrupted at any point in its instruction stream, and the processing core may be assigned to execute instructions of another process. Additionally, Section 4.2 introduced parallel execution, in which two instruction streams (representing different processes) execute simultaneously on separate processing cores. In this chapter, we explain how concurrent or parallel execution can contribute to issues involving the integrity of data shared by several processes.
Let's consider an example of how this can happen. In Chapter 3, we developed a model of a system consisting of cooperating sequential processes or threads, all running asynchronously and possibly sharing data. We illustrated this model with the producer-consumer problem, which is a representative paradigm of many operating system functions. Specifically, in Section 3.5, we described how a bounded buffer could be used to enable processes to share memory.
We now return to our consideration of the bounded buffer. As we pointed out, our original solution allowed at most BUFFER_SIZE - 1 items in the buffer at the same time. Suppose we want to modify the algorithm to remedy this deficiency. One possibility is to add an integer variable, count, initialized to 0. count is incremented every time we add a new item to the buffer and is decremented every time we remove one item from the buffer. The code for the producer process can be modified as follows:
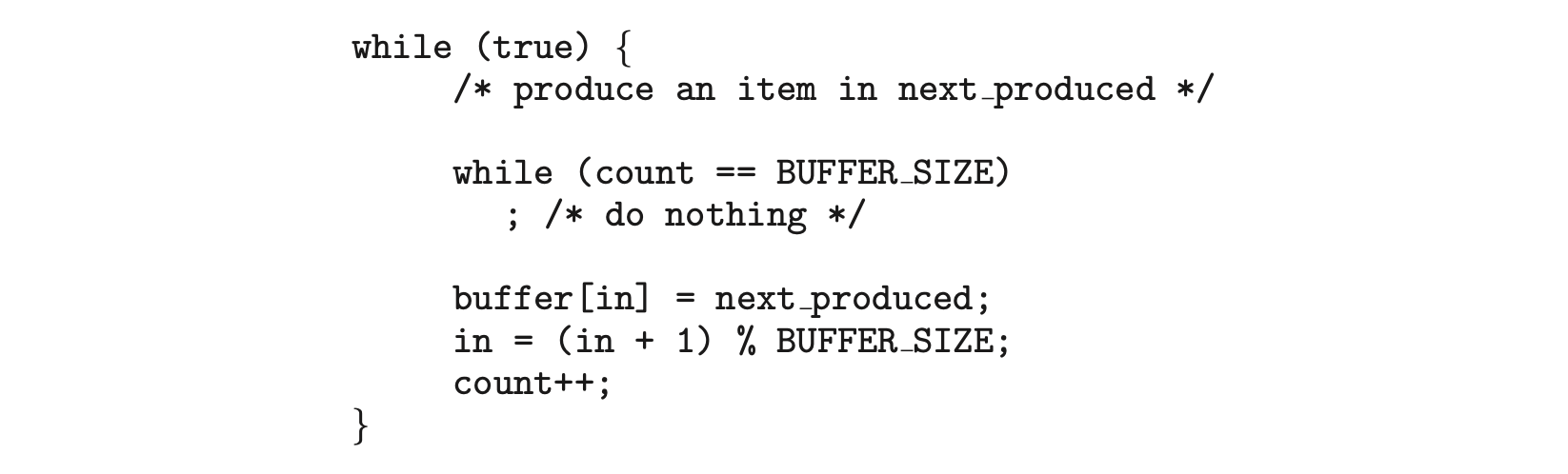
The code for the consumer process can be modified as follows:
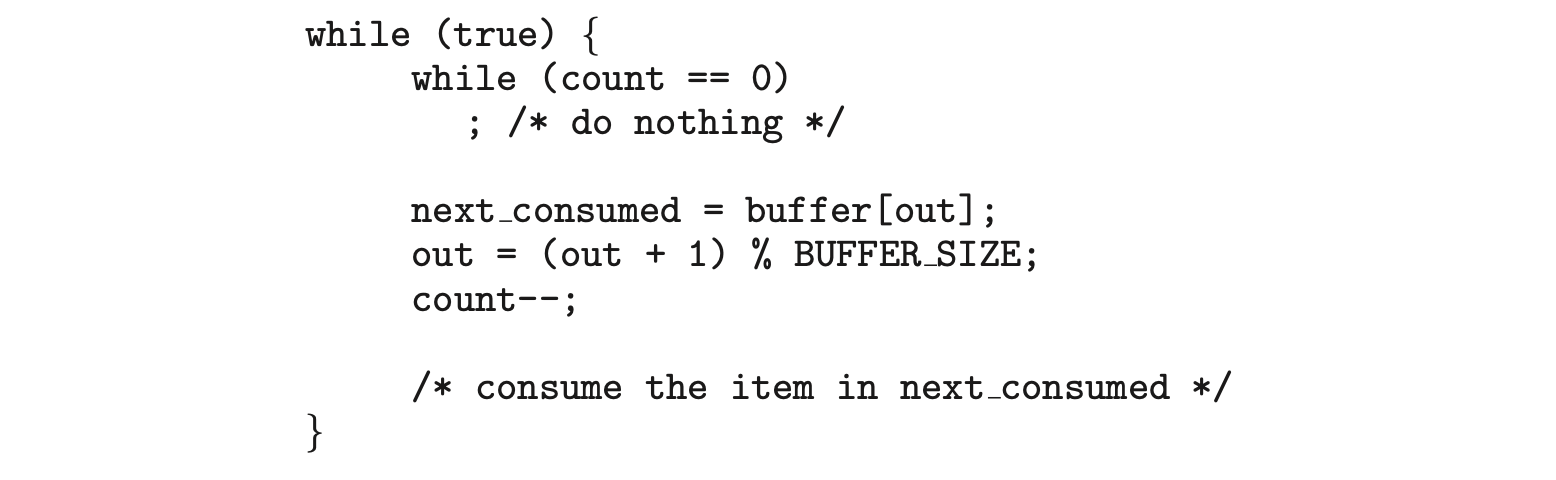 Although the producer and consumer routines shown above are correct separately, they may not function correctly when executed concurrently. As an illustration, suppose that the value of the variable count is currently 5 and that the producer and consumer processes concurrently execute the statements "
Although the producer and consumer routines shown above are correct separately, they may not function correctly when executed concurrently. As an illustration, suppose that the value of the variable count is currently 5 and that the producer and consumer processes concurrently execute the statements "count++" and "count--". Following the execution of these two statements, the value of the variable count may be 4, 5, or 6! The only correct result, though, is count == 5, which is generated correctly if the producer and consumer execute separately.
We can show that the value of count may be incorrect as follows. Note that the statement "count++" may be implemented in machine language (on a typical machine) as follows:
 where is one of the local CPU registers. Similarly, the statement "count-" is implemented as follows:
where is one of the local CPU registers. Similarly, the statement "count-" is implemented as follows:

where again is one of the local CPU registers. Even though and may be the same physical register, remember that the contents of this register will be saved and restored by the interrupt handler (Section 1.2.3).
The concurrent execution of "count++" and "count--" is equivalent to a sequential execution in which the lower-level statements presented previously are interleaved in some arbitrary order (but the order within each high-level statement is preserved). One such interleaving is the following:
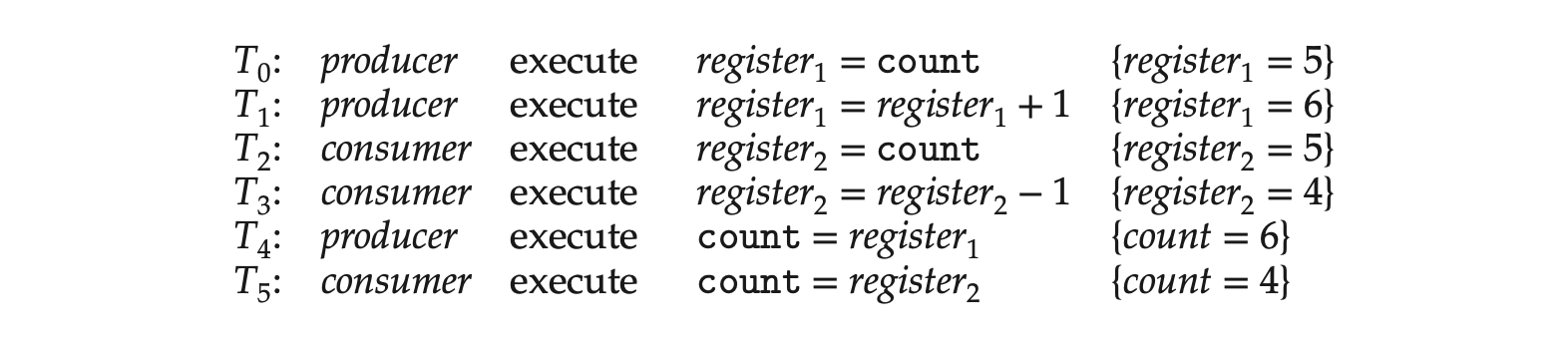
Notice that we have arrived at the incorrect state "count == 4", indicating that four buffers are full, when, in fact, five buffers are full. If we reversed the order of the statements at and , we would arrive at the incorrect state "count == 6".
We would arrive at this incorrect state because we allowed both processes to manipulate the variable count concurrently. A situation like this, where several processes access and manipulate the same data concurrently and the outcome of the execution depends on the particular order in which the access takes place, is called a race condition. To guard against the race condition above, we need to ensure that only one process at a time can be manipulating the variable count. To make such a guarantee, we require that the processes be synchronized in some way.
Situations such as the one just described occur frequently in operating systems as different parts of the system manipulate resources. Furthermore, as we have emphasized in earlier chapters, the prominence of multicore systems has brought an increased emphasis on developing multithreaded applications. In such applications, several threads--which are quite possibly sharing data--are running in parallel on different processing cores. Clearly, we want any changes that result from such activities not to interfere with one another. Because of the importance of this issue, we devote a major portion of this chapter to process synchronization and coordination among cooperating processes.
6.2 The Critical-Section Problem
We begin our consideration of process synchronization by discussing the so-called critical-section problem. Consider a system consisting of processes . Each process has a segment of code, called a critical section, in which the process may be accessing -- and updating -- data that is shared with at least one other process. The important feature of the system is that, when one process is executing in its critical section, no other process is allowed to execute in its critical section. That is, no two processes are executing in their critical sections at the same time. The critical-section problem is to design a protocol that the processes can use to synchronize their activity so as to cooperatively share data. Each process must request permission to enter its critical section. The section of code implementing this request is the entry section. The critical section may be followed by an exit section. The remaining code is the remainder section. The general structure of a typical process is shown in Figure 1. The entry section and exit section are enclosed in boxes to highlight these important segments of code.
A solution to the critical-section problem must satisfy the following three requirements:
-
Mutual exclusion. If process is executing in its critical section, then no other processes can be executing in their critical sections.
-
Progress. If no process is executing in its critical section and some processes wish to enter their critical sections, then only those processes that are not executing in their remainder sections can participate in deciding which will enter its critical section next, and this selection cannot be postponed indefinitely.
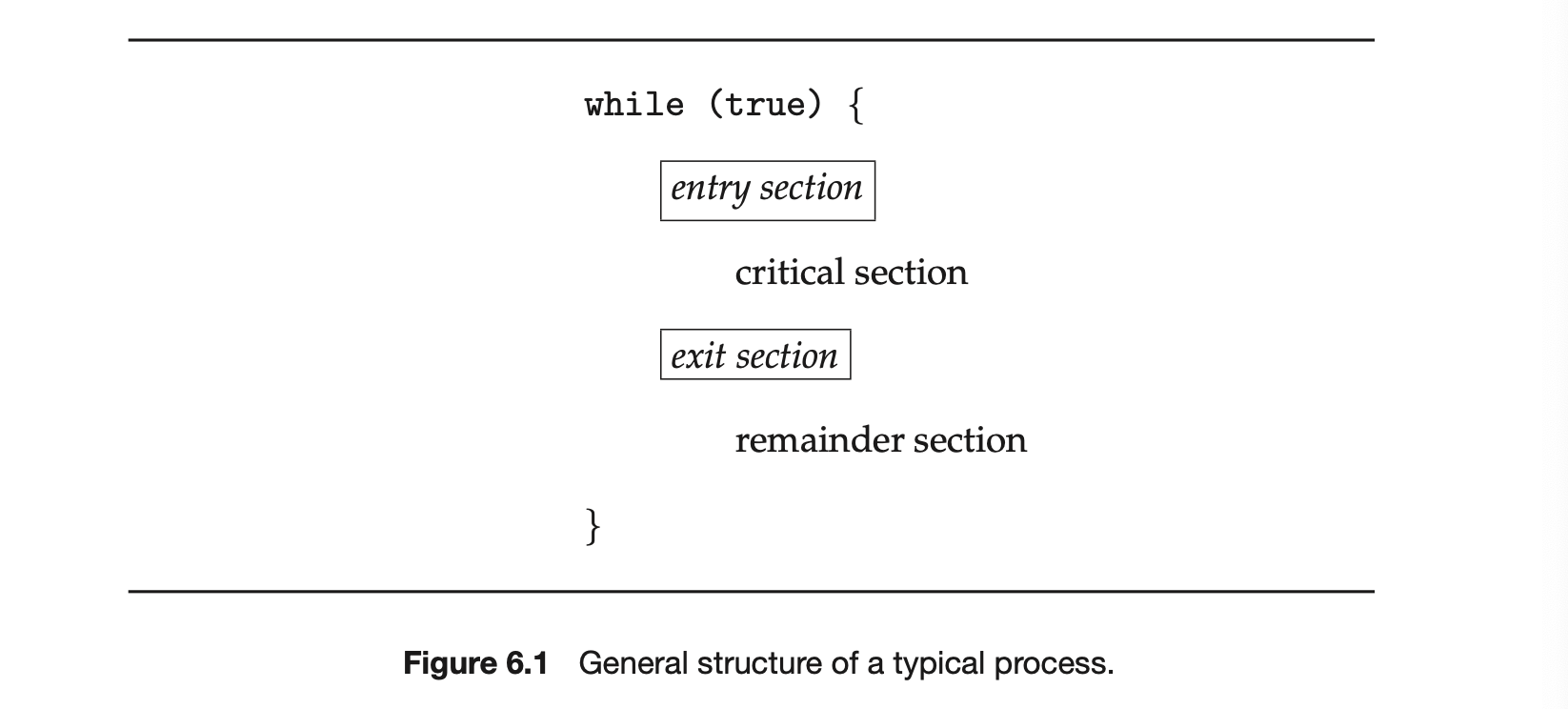
-
Bounded waiting . There exists a bound, or limit, on the number of times that other processes are allowed to enter their critical sections after a process has made a request to enter its critical section and before that request is granted.
We assume that each process is executing at a nonzero speed. However, we can make no assumption concerning the relative speed of the processes.
At a given point in time, many kernel-mode processes may be active in the operating system. As a result, the code implementing an operating system (kernel code) is subject to several possible race conditions. Consider as an example a kernel data structure that maintains a list of all open files in the system. This list must be modified when a new file is opened or closed (adding the file to the list or removing it from the list). If two processes were to open files simultaneously, the separate updates to this list could result in a race condition.
Another example is illustrated in Figure 6.2. In this situation, two processes, and , are creating child processes using the fork() system call. Recall from Section 3.3.1 that fork() returns the process identifier of the newly created process to the parent process. In this example, there is a race condition on the variable kernel variable next_available_pid which represents the value of the next available process identifier. Unless mutual exclusion is provided, it is possible the same process identifier number could be assigned to two separate processes.
Other kernel data structures that are prone to possible race conditions include structures for maintaining memory allocation, for maintaining process lists, and for interrupt handling. It is up to kernel developers to ensure that the operating system is free from such race conditions.
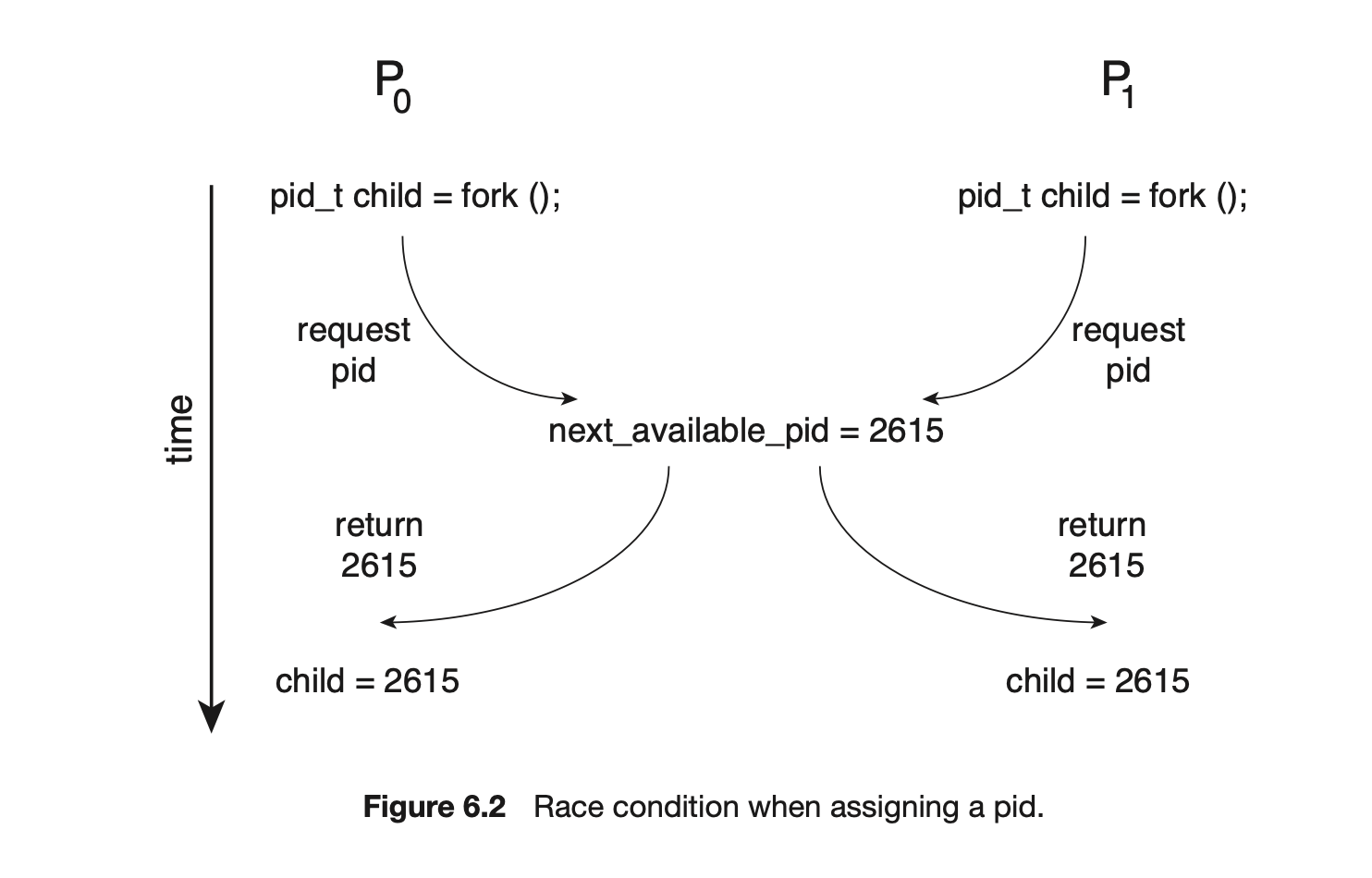
The critical-section problem could be solved simply in a single-core environment if we could prevent interrupts from occurring while a shared variable was being modified. In this way, we could be sure that the current sequence of instructions would be allowed to execute in order without preemption. No other instructions would be run, so no unexpected modifications could be made to the shared variable.
Unfortunately, this solution is not as feasible in a multiprocessor environment. Disabling interrupts on a multiprocessor can be time consuming, since the message is passed to all the processors. This message passing delays entry into each critical section, and system efficiency decreases. Also consider the effect on a system's clock if the clock is kept updated by interrupts.
Two general approaches are used to handle critical sections in operating systems: preemptive kernels and nonpreemptive kernels. A preemptive kernel allows a process to be preempted while it is running in kernel mode. A nonpreemptive kernel does not allow a process running in kernel mode to be preempted; a kernel-mode process will run until it exits kernel mode, blocks, or voluntarily yields control of the CPU.
Obviously, a nonpreemptive kernel is essentially free from race conditions on kernel data structures, as only one process is active in the kernel at a time. We cannot say the same about preemptive kernels, so they must be carefully designed to ensure that shared kernel data are free from race conditions. Preemptive kernels are especially difficult to design for SMP architectures, since in these environments it is possible for two kernel-mode processes to run simultaneously on different CPU cores.
Why, then, would anyone favor a preemptive kernel over a nonpreemptive one? A preemptive kernel may be more responsive, since there is less risk that a kernel-mode process will run for an arbitrarily long period before relinquishing the processor to waiting processes. (Of course, this risk can also be minimized by designing kernel code that does not behave in this way.) Furthermore, a preemptive kernel is more suitable for real-time programming, as it will allow a real-time process to preempt a process currently running in the kernel.
6.3 Peterson's Solution
Next, we illustrate a classic software-based solution to the critical-section problem known as Peterson's solution. Because of the way modern computer architectures perform basic machine-language instructions, such as load and store, there are no guarantees that Peterson's solution will work correctly on such architectures. However, we present the solution because it provides a good algorithmic description of solving the critical-section problem and illustrates some of the complexities involved in designing software that addresses the requirements of mutual exclusion, progress, and bounded waiting.
Peterson's solution is restricted to two processes that alternate execution between their critical sections and remainder sections. The processes are numbered and . For convenience, when presenting , we use to denote the other process; that is, equals .
Peterson's solution requires the two processes to share two data items:
int turn;
boolean flag[2];
The variable turn indicates whose turn it is to enter its critical section. That is, if turn == i, then process is allowed to execute in its critical section. The flag array is used to indicate if a process is ready to enter its critical section. For example, if flag[i] is true, is ready to enter its critical section. With an explanation of these data structures complete, we are now ready to describe the algorithm shown in Figure 6.3.
To enter the critical section, process first sets flag[i] to be true and then sets turn to the value j, thereby asserting that if the other process wishes to enter the critical section, it can do so. If both processes try to enter at the same time, turn will be set to both i and j at roughly the same time. Only one of these assignments will last; the other will occur but will be overwritten immediately. The eventual value of turn determines which of the two processes is allowed to enter its critical section first.
We now prove that this solution is correct. We need to show that:
- Mutual exclusion is preserved.
- The progress requirement is satisfied.
- The bounded-waiting requirement is met.
To prove property 1, we note that each enters its critical section only if either flag[j] == false or turn == i. Also note that, if both processes can be executing in their critical sections at the same time, then flag[0] == flag[1] == true. These two observations imply that and could not have successfully executed their while statements at about the same time, since the value of turn can be either 0 or 1 but cannot be both. Hence, one of the processes--say, --must have successfully executed the while statement, whereas had to execute at least one additional statement ("turn == j"). However, at that time, flag[j] == true and turn == j, and this condition will persist as long as is in its critical section; as a result, mutual exclusion is preserved.
To prove properties 2 and 3, we note that a process can be prevented from entering the critical section only if it is stuck in the while loop with the condition flag[j] == true and turn == j; this loop is the only one possible. If is not ready to enter the critical section, then flag[j] == false, and can enter its critical section. If has set flag[j] to true and is also executing in its while statement, then either turn == i or turn == j. If turn == i, then will enter the critical section. If turn == j, then will enter the critical section. However, once exits its critical section, it will reset flag[j] to false, allowing to enter its critical section. If resets flag[j] to true, it must also set turn to i. Thus, since does not change the value of the variable turn while executing the while statement, will enter the critical section (progress) after at most one entry by (bounded waiting).
As mentioned at the beginning of this section, Peterson's solution is not guaranteed to work on modern computer architectures for the primary reason that, to improve system performance, processors and/or compilers may reorder read and write operations that have no dependencies. For a single-threaded application, this reordering is immaterial as far as program correctness is concerned, as the final values are consistent with what is expected. (This is similar to balancing a checkbook--the actual order in which credit and debit operations are performed is unimportant, because the final balance will still be the same.) But for a multithreaded application with shared data, the reordering of instructions may render inconsistent or unexpected results.
As an example, consider the following data that are shared between two threads:

where Thread 1 performs the statements
 and Thread 2 performs
and Thread 2 performs
 The expected behavior is, of course, that Thread 1 outputs the value 100 for variable x. However, as there are no data dependencies between the variables flag and x, it is possible that a processor may reorder the instructions for Thread 2 so that flag is assigned true before assignment of x = 100. In this situation, it is possible that Thread 1 would output 0 for variable x. Less obvious is that the processor may also reorder the statements issued by Thread 1 and load the variable x before loading the value of flag. If this were to occur, Thread 1 would output 0 for variable x even if the instructions issued by Thread 2 were not reordered.
The expected behavior is, of course, that Thread 1 outputs the value 100 for variable x. However, as there are no data dependencies between the variables flag and x, it is possible that a processor may reorder the instructions for Thread 2 so that flag is assigned true before assignment of x = 100. In this situation, it is possible that Thread 1 would output 0 for variable x. Less obvious is that the processor may also reorder the statements issued by Thread 1 and load the variable x before loading the value of flag. If this were to occur, Thread 1 would output 0 for variable x even if the instructions issued by Thread 2 were not reordered.
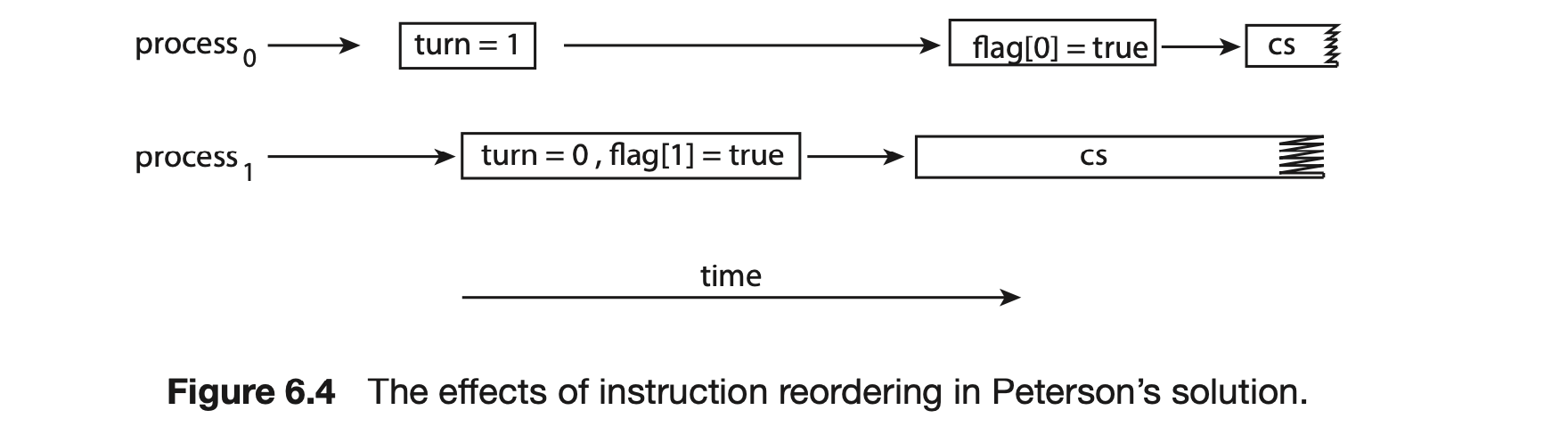
How does this affect Peterson's solution? Consider what happens if the assignments of the first two statements that appear in the entry section of Peterson's solution in Figure 6.3 are reordered; it is possible that both threads may be active in their critical sections at the same time, as shown in Figure 6.4.
As you will see in the following sections, the only way to preserve mutual exclusion is by using proper synchronization tools. Our discussion of these tools begins with primitive support in hardware and proceeds through abstract, high-level, software-based APIs available to both kernel developers and application programmers.
6.4 Hardware Support for Synchronization
We have just described one software-based solution to the critical-section problem. (We refer to it as a software-based solution because the algorithm involves no special support from the operating system or specific hardware instructions to ensure mutual exclusion.) However, as discussed, software-based solutions are not guaranteed to work on modern computer architectures. In this section, we present three hardware instructions that provide support for solving the critical-section problem. These primitive operations can be used directly as synchronization tools, or they can be used to form the foundation of more abstract synchronization mechanisms.
6.4.1 Memory Barriers
In Section 6.3, we saw that a system may reorder instructions, a policy that can lead to unreliable data states. How a computer architecture determines what memory guarantees it will provide to an application program is known as its memory model. In general, a memory model falls into one of two categories:
- Strongly ordered, where a memory modification on one processor is immediately visible to all other processors.
- Weakly ordered, where modifications to memory on one processor may not be immediately visible to other processors.
Memory models vary by processor type, so kernel developers cannot make any assumptions regarding the visibility of modifications to memory on a shared-memory multiprocessor. To address this issue, computer architectures provide instructions that can force any changes in memory to be propagated to all other processors, thereby ensuring that memory modifications are visible to threads running on other processors. Such instructions are known as memory barriers or memory fences. When a memory barrier instruction is performed, the system ensures that all loads and stores are completed before any subsequent load or store operations are performed. Therefore, even if instructions were reordered, the memory barrier ensures that the store operations are completed in memory and visible to other processors before future load or store operations are performed.
Let's return to our most recent example, in which reordering of instructions could have resulted in the wrong output, and use a memory barrier to ensure that we obtain the expected output.
If we add a memory barrier operation to Thread 1

we guarantee that the value of flag is loaded before the value of x.
Similarly, if we place a memory barrier between the assignments performed by Thread 2
 we ensure that the assignment to x occurs before the assignment to flag.
With respect to Peterson's solution, we could place a memory barrier between the first two assignment statements in the entry section to avoid the reordering of operations shown in Figure 6.4. Note that memory barriers are considered very low-level operations and are typically only used by kernel developers when writing specialized code that ensures mutual exclusion.
we ensure that the assignment to x occurs before the assignment to flag.
With respect to Peterson's solution, we could place a memory barrier between the first two assignment statements in the entry section to avoid the reordering of operations shown in Figure 6.4. Note that memory barriers are considered very low-level operations and are typically only used by kernel developers when writing specialized code that ensures mutual exclusion.
6.4.2 Hardware Instructions
Many modern computer systems provide special hardware instructions that allow us either to test and modify the content of a word or to swap the contents of two words atomically--that is, as one uninterruptible unit. We can use these special instructions to solve the critical-section problem in a relatively simple manner. Rather than discussing one specific instruction for one specific machine, we abstract the main concepts behind these types of instructions by describing the test_and_set() and compare_and_swap() instructions.
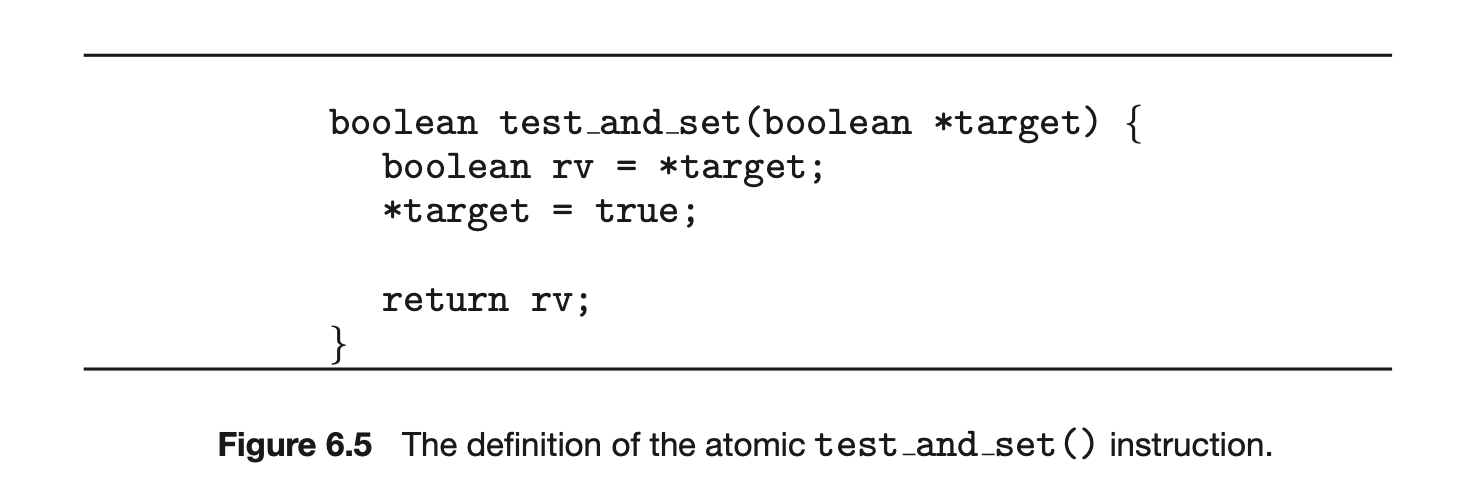
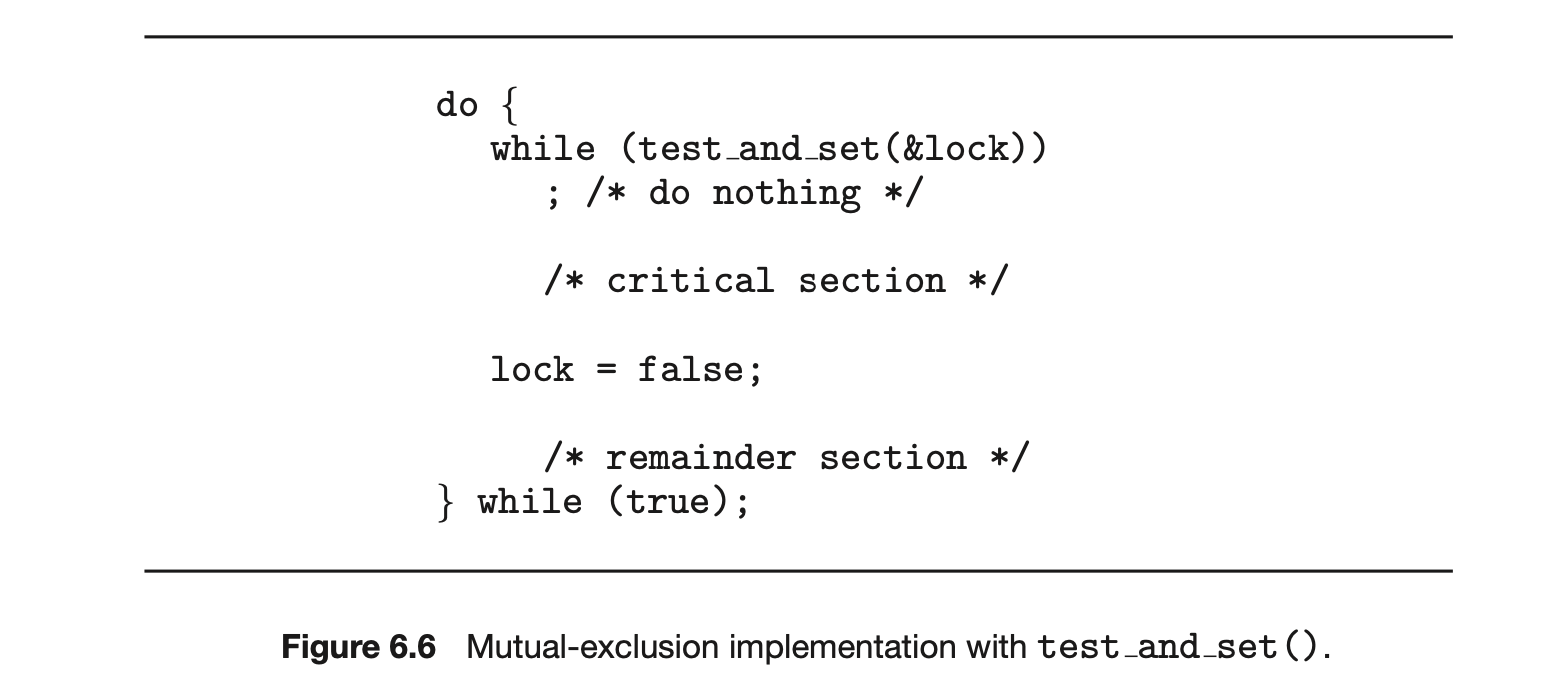
The test_and_set() instruction can be defined as shown in Figure 6.5. The important characteristic of this instruction is that it is executed atomically. Thus, if two test_and_set() instructions are executed simultaneously (each on a different core), they will be executed sequentially in some arbitrary order. If the machine supports the test_and_set() instruction, then we can implement mutual exclusion by declaring a boolean variable lock, initialized to false. The structure of process is shown in Figure 6.6.
The compare_and_swap() instruction (CAS), just like the test_and_set() instruction, operates on two words atomically, but uses a different mechanism that is based on swapping the content of two words.
The CAS instruction operates on three operands and is defined in Figure 6.7. The operand value is set to new_value only if the expression (*value == expected) is true. Regardless, CAS always returns the original value of the variable value. The important characteristic of this instruction is that it is executed atomically. Thus, if two CAS instructions are executed simultaneously (each on a different core), they will be executed sequentially in some arbitrary order.
Mutual exclusion using CAS can be provided as follows: A global variable (lock) is declared and is initialized to 0. The first process that invokes compare_and_swap() will set lock to 1. It will then enter its critical section,
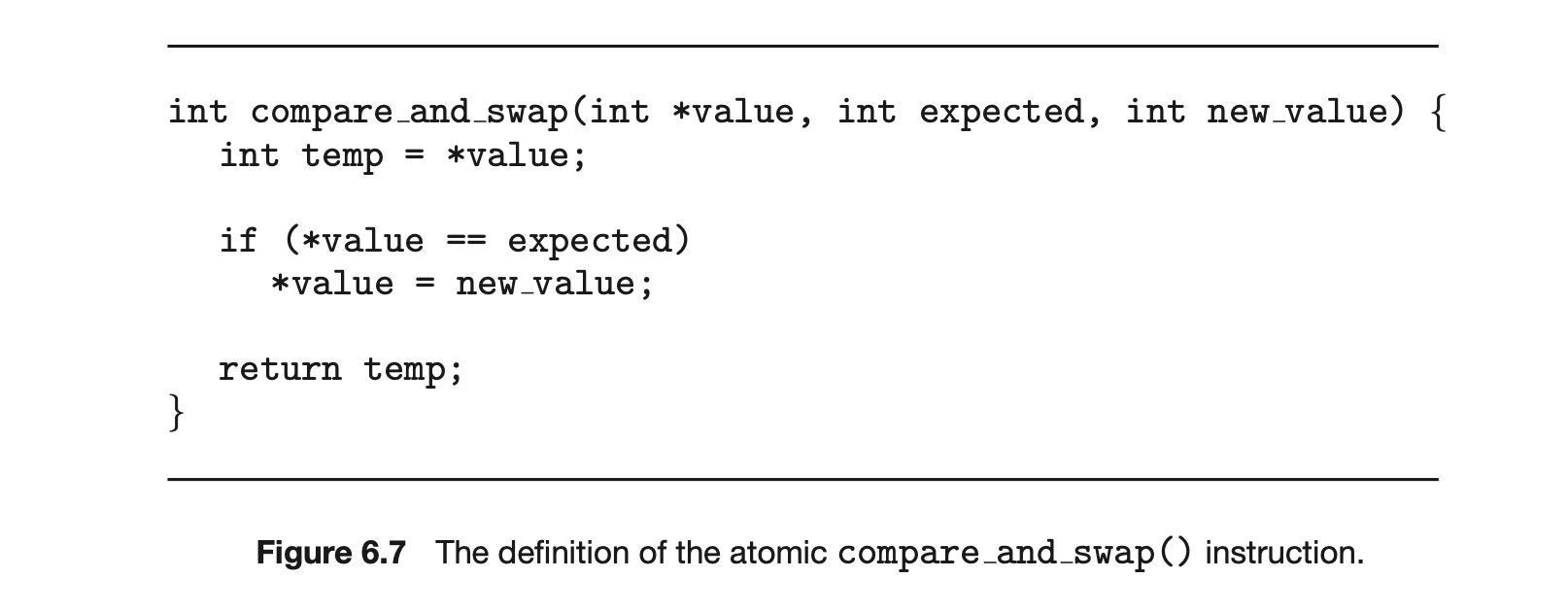
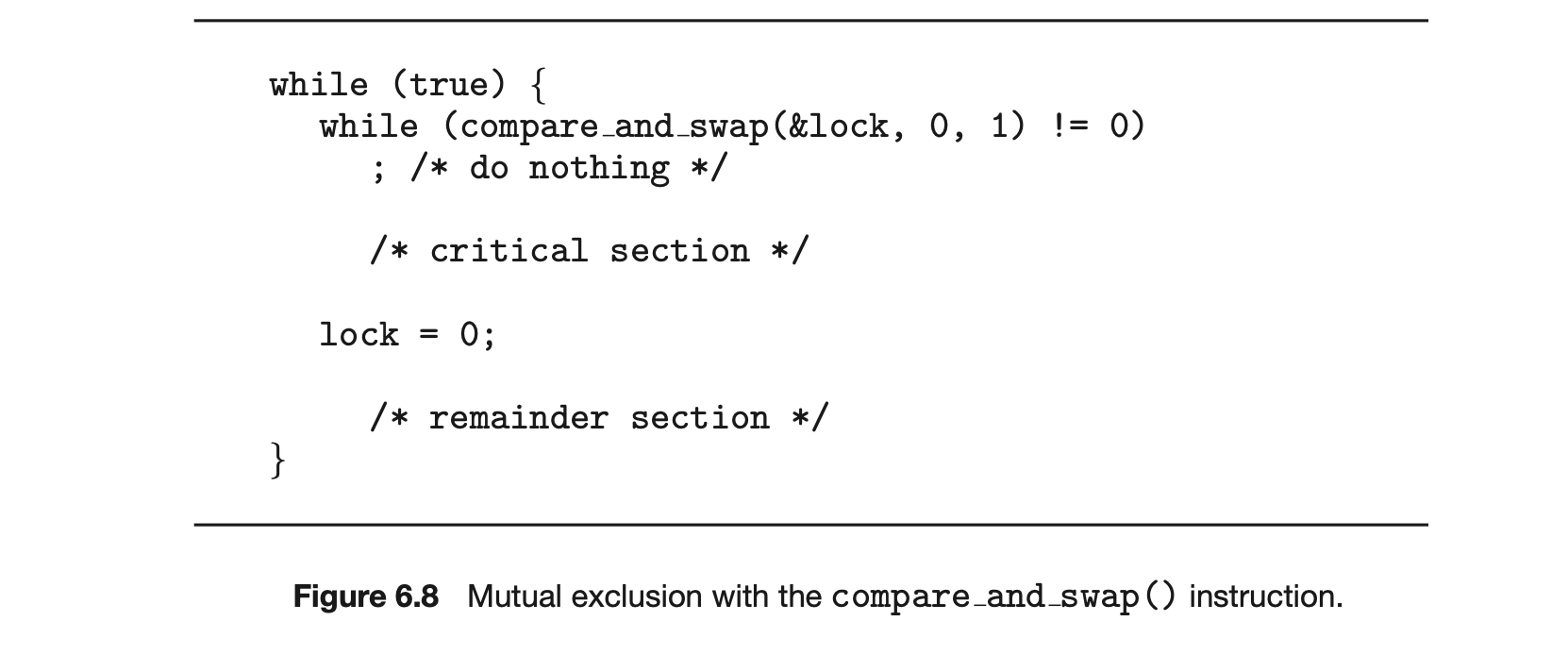
because the original value of lock was equal to the expected value of 0. Subsequent calls to compare_and_swap() will not succeed, because lock now is not equal to the expected value of 0. When a process exits its critical section, it sets lock back to 0, which allows another process to enter its critical section. The structure of process is shown in Figure 6.8.
Although this algorithm satisfies the mutual-exclusion requirement, it does not satisfy the bounded-waiting requirement. In Figure 6.9, we present
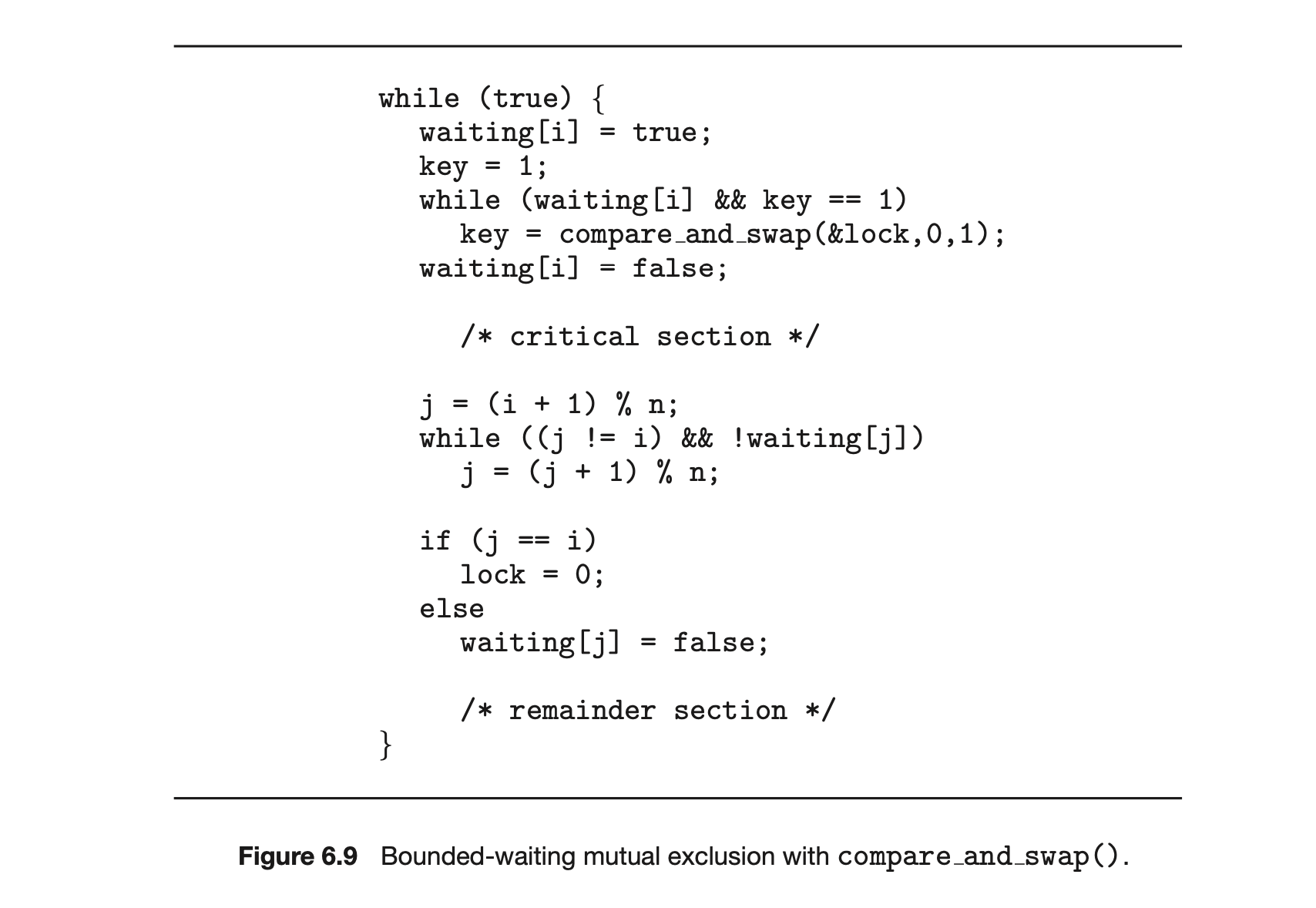
MAKING COMPARE-AND-SWAP ATOMIC
On Intel x86 architectures, the assembly language statement cmpxchg is used to implement the compare and swap() instruction. To enforce atomic execution, the lock prefix is used to lock the bus while the destination operand is being updated. The general form of this instruction appears as:
lock cmpxchg <destination operand>, <source operand>
another algorithm using the compare_and_swap() instruction that satisfies all the critical-section requirements. The common data structures are

The elements in the waiting array are initialized to false, and lock is initialized to 0. To prove that the mutual-exclusion requirement is met, we note that process can enter its critical section only if either waiting[i] == false or key == 0. The value of key can become 0 only if the compare_and_swap() is executed. The first process to execute the compare_and_swap() will find key == 0; all others must wait. The variable waiting[i] can become false only if another process leaves its critical section; only one waiting[i] is set to false, maintaining the mutual-exclusion requirement.
To prove that the progress requirement is met, we note that the arguments presented for mutual exclusion also apply here, since a process exiting the critical section either sets lock to 0 or sets waiting[j] to false. Both allow a process that is waiting to enter its critical section to proceed.
To prove that the bounded-waiting requirement is met, we note that, when a process leaves its critical section, it scans the array waiting in the cyclic ordering (, ,..., , ,..., ). It designates the first process in this ordering that is in the entry section (waiting[j] == true) as the next one to enter the critical section. Any process waiting to enter its critical section will thus do so within turns.
Details describing the implementation of the atomic test_and_set() and compare_and_swap() instructions are discussed more fully in books on computer architecture.
6.4.3 Atomic Variables
Typically, the compare_and_swap() instruction is not used directly to provide mutual exclusion. Rather, it is used as a basic building block for constructing other tools that solve the critical-section problem. One such tool is an atomic variable, which provides atomic operations on basic data types such as integers and booleans. We know from Section 6.1 that incrementing or decrementing an integer value may produce a race condition. Atomic variables can be used in to ensure mutual exclusion in situations where there may be a data race on a single variable while it is being updated, as when a counter is incremented.
Most systems that support atomic variables provide special atomic data types as well as functions for accessing and manipulating atomic variables. These functions are often implemented using compare_and_swap() operations. As an example, the following increments the atomic integer sequence:
 where the
where the increment() function is implemented using the CAS instruction:
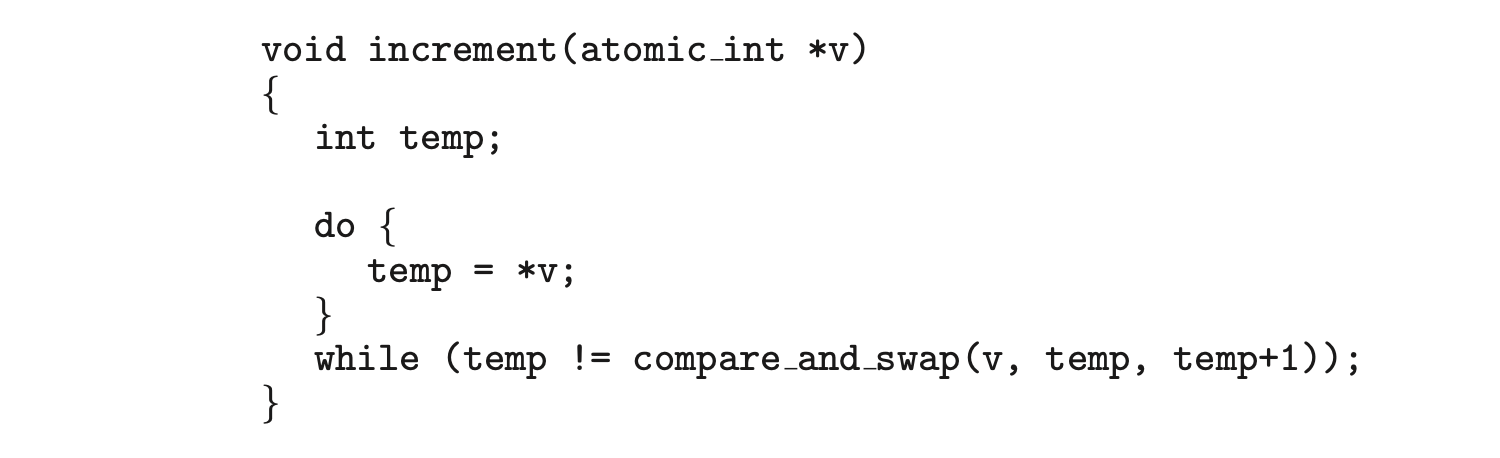 It is important to note that although atomic variables provide atomic updates, they do not entirely solve race conditions in all circumstances. For example, in the bounded-buffer problem described in Section 6.1, we could use an atomic integer for count. This would ensure that the updates to count were atomic. However, the producer and consumer processes also have while loops whose condition depends on the value of count. Consider a situation in which the buffer is currently empty and two consumers are looping while waiting for count > 0. If a producer entered one item in the buffer, both consumers could exit their while loops (as count would no longer be equal to 0) and proceed to consume, even though the value of count was only set to 1.
It is important to note that although atomic variables provide atomic updates, they do not entirely solve race conditions in all circumstances. For example, in the bounded-buffer problem described in Section 6.1, we could use an atomic integer for count. This would ensure that the updates to count were atomic. However, the producer and consumer processes also have while loops whose condition depends on the value of count. Consider a situation in which the buffer is currently empty and two consumers are looping while waiting for count > 0. If a producer entered one item in the buffer, both consumers could exit their while loops (as count would no longer be equal to 0) and proceed to consume, even though the value of count was only set to 1.
Atomic variables are commonly used in operating systems as well as concurrent applications, although their use is often limited to single updates of shared data such as counters and sequence generators. In the following sections, we explore more robust tools that address race conditions in more generalized situations.
6.5 Mutex Locks
The hardware-based solutions to the critical-section problem presented in Section 6.4 are complicated as well as generally inaccessible to application programmers. Instead, operating-system designers build higher-level software tools to solve the critical-section problem. The simplest of these tools is the mutex lock. (In fact, the term mutex is short for mutual exclusion.) We use the mutex lock to protect critical sections and thus prevent race conditions. That is, a process must acquire the lock before entering a critical section; it releases the lock when it exits the critical section. The acquire() function acquires the lock, and the release() function releases the lock, as illustrated in Figure 6.10.
A mutex lock has a boolean variable available whose value indicates if the lock is available or not. If the lock is available, a call to acquire() succeeds, and the lock is then considered unavailable. A process that attempts to acquire an unavailable lock is blocked until the lock is released.
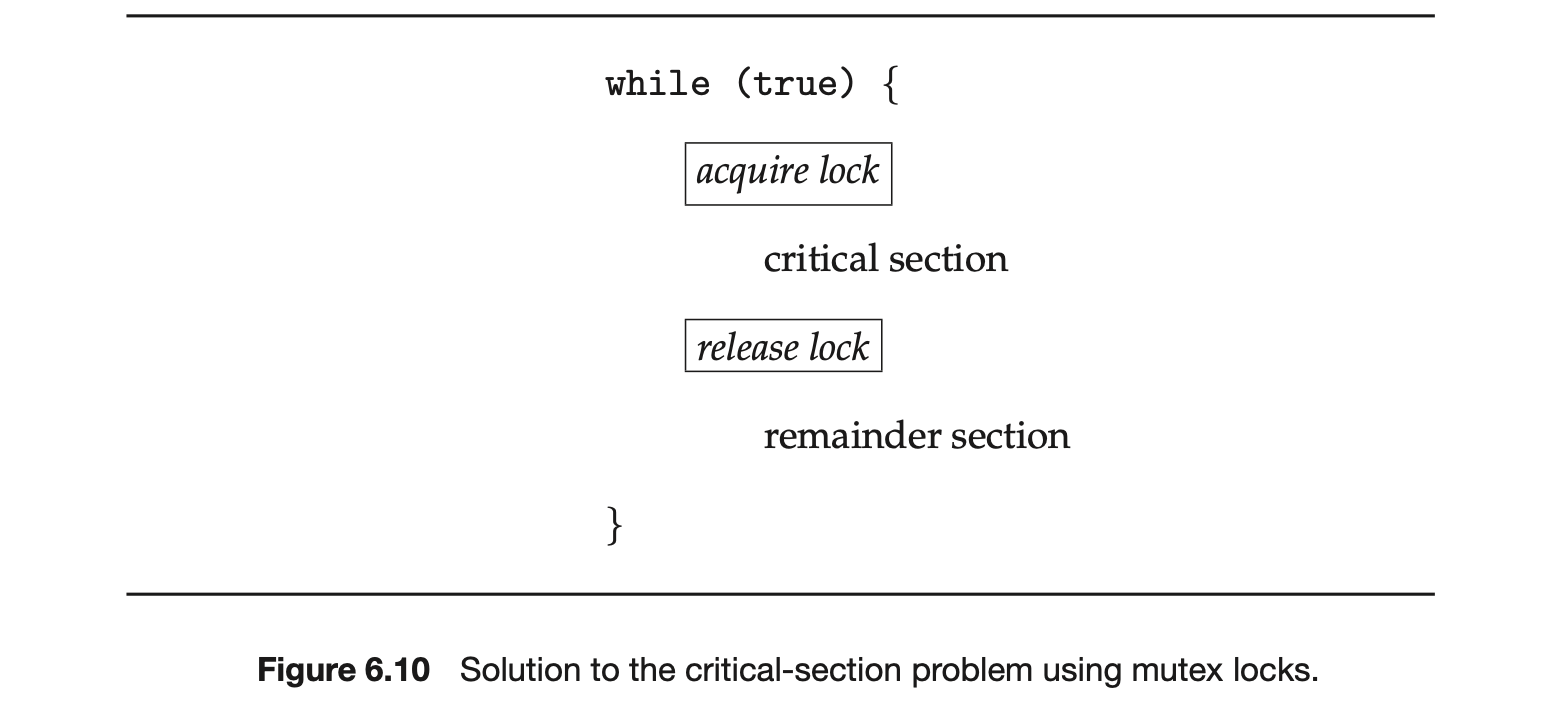
The definition of acquire() is as follows:

The definition of release() is as follows:
 Calls to either acquire() or release() must be performed atomically. Thus, mutex locks can be implemented using the CAS operation described in Section 6.4, and we leave the description of this technique as an exercise.
Calls to either acquire() or release() must be performed atomically. Thus, mutex locks can be implemented using the CAS operation described in Section 6.4, and we leave the description of this technique as an exercise.
Lock Contention
Locks are either contended or uncontended. A lock is considered contended if a thread blocks while trying to acquire the lock. If a lock is available when a thread attempts to acquire it, the lock is considered uncontended. Contended locks can experience either high contention (a relatively large number of threads attempting to acquire the lock) or low contention (a relatively small number of threads attempting to acquire the lock.) Unsurprisingly, highly contended locks tend to decrease overall performance of concurrent applications.
What is meant by "short duration"?
Spinlocks are often identified as the locking mechanism of choice on multiprocessor systems when the lock is to be held for a short duration. But what exactly constitutes a short duration? Given that waiting on a lock requires two context switches--a context switch to move the thread to the waiting state and a second context switch to restore the waiting thread once the lock becomes available--the general rule is to use a spinlock if the lock will be held for a duration of less than two context switches.
The main disadvantage of the implementation given here is that it requires busy waiting. While a process is in its critical section, any other process that tries to enter its critical section must loop continuously in the call to acquire(). This continual looping is clearly a problem in a real multiprogramming system, where a single CPU core is shared among many processes. Busy waiting also wastes CPU cycles that some other process might be able to use productively. (In Section 6.6, we examine a strategy that avoids busy waiting by temporarily putting the waiting process to sleep and then awakening it once the lock becomes available.)
The type of mutex lock we have been describing is also called a spinlock because the process "spins" while waiting for the lock to become available. (We see the same issue with the code examples illustrating the compare_and_swap() instruction.) Spinlocks do have an advantage, however, in that no context switch is required when a process must wait on a lock, and a context switch may take considerable time. In certain circumstances on multi-core systems, spinlocks are in fact the preferable choice for locking. If a lock is to be held for a short duration, one thread can "spin" on one processing core while another thread performs its critical section on another core. On modern multicore computing systems, spinlocks are widely used in many operating systems.
In Chapter 7 we examine how mutex locks can be used to solve classical synchronization problems. We also discuss how mutex locks and spinlocks are used in several operating systems, as well as in Pthreads.
6.6 Semaphores
Mutex locks, as we mentioned earlier, are generally considered the simplest of synchronization tools. In this section, we examine a more robust tool that can behave similarly to a mutex lock but can also provide more sophisticated ways for processes to synchronize their activities.
A semaphore S is an integer variable that, apart from initialization, is accessed only through two standard atomic operations: wait() and signal(). Semaphores were introduced by the Dutch computer scientist Edsger Dijkstra, and such, the wait() operation was originally termed P (from the Dutch_proberen_, "to test"); signal() was originally called V (from verhogen, "to increment"). The definition of wait() is as follows:

The definition of signal() is as follows:
 All modifications to the integer value of the semaphore in the wait() and signal() operations must be executed atomically. That is, when one process modifies the semaphore value, no other process can simultaneously modify that same semaphore value. In addition, in the case of wait(S), the testing of the integer value of S (S 0), as well as its possible modification (S--), must be executed without interruption. We shall see how these operations can be implemented in Section 6.6.2. First, let's see how semaphores can be used.
All modifications to the integer value of the semaphore in the wait() and signal() operations must be executed atomically. That is, when one process modifies the semaphore value, no other process can simultaneously modify that same semaphore value. In addition, in the case of wait(S), the testing of the integer value of S (S 0), as well as its possible modification (S--), must be executed without interruption. We shall see how these operations can be implemented in Section 6.6.2. First, let's see how semaphores can be used.
6.6.1 Semaphore Usage
Operating systems often distinguish between counting and binary semaphores. The value of a counting semaphore can range over an unrestricted domain. The value of a binary semaphore can range only between 0 and 1. Thus, binary semaphores behave similarly to mutex locks. In fact, on systems that do not provide mutex locks, binary semaphores can be used instead for providing mutual exclusion.
Counting semaphores can be used to control access to a given resource consisting of a finite number of instances. The semaphore is initialized to the number of resources available. Each process that wishes to use a resource performs a wait() operation on the semaphore (thereby decrementing the count). When a process releases a resource, it performs a signal() operation (incrementing the count). When the count for the semaphore goes to 0, all resources are being used. After that, processes that wish to use a resource will block until the count becomes greater than 0.
We can also use semaphores to solve various synchronization problems. For example, consider two concurrently running processes: with a statement and with a statement . Suppose we require that be executed only after has completed. We can implement this scheme readily by letting and share a common semaphore synch, initialized to 0. In process , we insert the statements

In process , we insert the statements
 Because synch is initialized to 0, will execute only after has invoked signal(synch), which is after statement has been executed.
Because synch is initialized to 0, will execute only after has invoked signal(synch), which is after statement has been executed.
6.6.2 Semaphore Implementation
Recall that the implementation of mutex locks discussed in Section 6.5 suffers from busy waiting. The definitions of the wait() and signal() semaphore operations just described present the same problem. To overcome this problem, we can modify the definition of the wait() and signal() operations as follows: When a process executes the wait() operation and finds that the semaphore value is not positive, it must wait. However, rather than engaging in busy waiting, the process can suspend itself. The suspend operation places a process into a waiting queue associated with the semaphore, and the state of the process is switched to the waiting state. Then control is transferred to the CPU scheduler, which selects another process to execute.
A process that is suspended, waiting on a semaphore S, should be restarted when some other process executes a signal() operation. The process is restarted by a wakeup() operation, which changes the process from the waiting state to the ready state. The process is then placed in the ready queue. (The CPU may or may not be switched from the running process to the newly ready process, depending on the CPU-scheduling algorithm.)
To implement semaphores under this definition, we define a semaphore as follows:

Each semaphore has an integer value and a list of processes list. When a process must wait on a semaphore, it is added to the list of processes. A signal() operation removes one process from the list of waiting processes and awakens that process.
Now, the wait() semaphore operation can be defined as
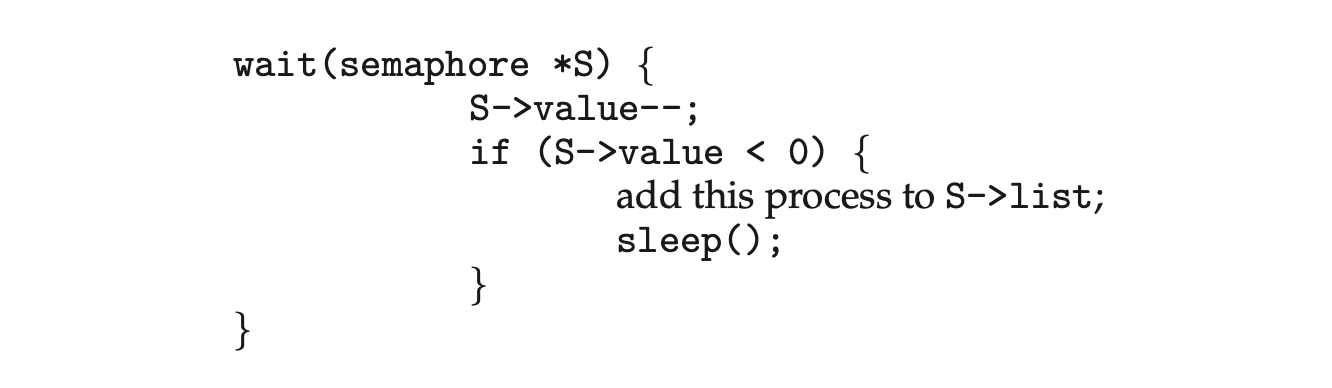
and the signal() semaphore operation can be defined as
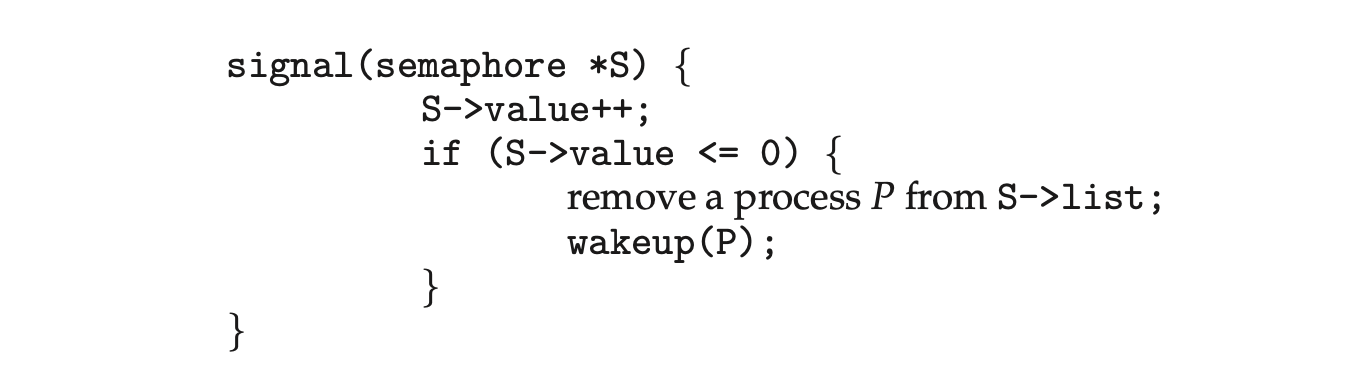 The sleep() operation suspends the process that invokes it. The wakeup(P) operation resumes the execution of a suspended process P. These two operations are provided by the operating system as basic system calls.
The sleep() operation suspends the process that invokes it. The wakeup(P) operation resumes the execution of a suspended process P. These two operations are provided by the operating system as basic system calls.
Note that in this implementation, semaphore values may be negative, whereas semaphore values are never negative under the classical definition of semaphores with busy waiting. If a semaphore value is negative, its magnitude is the number of processes waiting on that semaphore. This fact results from switching the order of the decrement and the test in the implementation of the wait() operation.
The list of waiting processes can be easily implemented by a link field in each process control block (PCB). Each semaphore contains an integer value and a pointer to a list of PCBs. One way to add and remove processes from the list so as to ensure bounded waiting is to use a FIFO queue, where the semaphore contains both head and tail pointers to the queue. In general, however, the list can use any queuing strategy. Correct usage of semaphores does not depend on a particular queuing strategy for the semaphore lists.
As mentioned, it is critical that semaphore operations be executed atomically. We must guarantee that no two processes can execute wait() and signal() operations on the same semaphore at the same time. This is a critical-section problem, and in a single-processor environment, we can solve it by simply inhibiting interrupts during the time the wait() and signal() operations are executing. This scheme works in a single-processor environment because, once interrupts are inhibited, instructions from different processes cannot be interleaved. Only the currently running process executes until interrupts are reenabled and the scheduler can regain control.
In a multicore environment, interrupts must be disabled on every processing core. Otherwise, instructions from different processes (running on different cores) may be interleaved in some arbitrary way. Disabling interrupts on every core can be a difficult task and can seriously diminish performance. Therefore, SMP systems must provide alternative techniques--such as compare_and_swap() or spinlocks--to ensure that wait() and signal() are performed atomically.
It is important to admit that we have not completely eliminated busy waiting with this definition of the wait() and signal() operations. Rather, we have moved busy waiting from the entry section to the critical sections of application programs. Furthermore, we have limited busy waiting to the critical sections of the wait() and signal() operations, and these sections are short (if properly coded, they should be no more than about ten instructions). Thus, the critical section is almost never occupied, and busy waiting occursrately, and then for only a short time. An entirely different situation exists with application programs whose critical sections may be long (minutes or even hours) or may almost always be occupied. In such cases, busy waiting is extremely inefficient.
6.7 Monitors
Although semaphores provide a convenient and effective mechanism for process synchronization, using them incorrectly can result in timing errors that are difficult to detect, since these errors happen only if particular execution sequences take place, and these sequences do not always occur.
We have seen an example of such errors in the use of a count in our solution to the producer-consumer problem (Section 6.1). In that example, the timing problem happened only rarely, and even then the count value appeared to be reasonable--off by only 1. Nevertheless, the solution is obviously not an acceptable one. It is for this reason that mutex locks and semaphores were introduced in the first place.
Unfortunately, such timing errors can still occur when either mutex locks or semaphores are used. To illustrate how, we review the semaphore solution to the critical-section problem. All processes share a binary semaphore variable mutex, which is initialized to 1. Each process must execute wait(mutex) before entering the critical section and signal(mutex) afterward. If this sequence is not observed, two processes may be in their critical sections simultaneously. Next, we list several difficulties that may result. Note that these difficulties will arise even if a single process is not well behaved. This situation may be caused by an honest programming error or an uncooperative programmer.
- Suppose that a program interchanges the order in which the wait() and signal() operations on the semaphore mutex are executed, resulting in the following execution:
 In this situation, several processes may be executing in their critical sections simultaneously, violating the mutual-exclusion requirement. This error may be discovered only if several processes are simultaneously active in their critical sections. Note that this situation may not always be reproducible.
In this situation, several processes may be executing in their critical sections simultaneously, violating the mutual-exclusion requirement. This error may be discovered only if several processes are simultaneously active in their critical sections. Note that this situation may not always be reproducible. - Suppose that a program replaces signal(mutex) with wait(mutex). That is, it executes
 In this case, the process will permanently block on the second call to wait(), as the semaphore is now unavailable.
In this case, the process will permanently block on the second call to wait(), as the semaphore is now unavailable. - Suppose that a process omits the wait(mutex), or the signal(mutex), or both. In this case, either mutual exclusion is violated or the process will permanently block.
These examples illustrate that various types of errors can be generated easily when programmers use semaphores or mutex locks incorrectly to solve the critical-section problem. One strategy for dealing with such errors is to incorporate simple synchronization tools as high-level language constructs. In this section, we describe one fundamental high-level synchronization construct--the monitor type.
6.7.1 Monitor Usage
An abstract data type --or ADT--encapsulates data with a set of functions to operate on that data that are independent of any specific implementation of the ADT. A monitor type is an ADT that includes a set of programmer-defined operations that are provided with mutual exclusion within the monitor. The monitor type also declares the variables whose values define the state of an instance of that type, along with the bodies of functions that operate on those variables. The syntax of a monitor type is shown in Figure 6.11. The representation of a monitor type cannot be used directly by the various processes. Thus, a function defined within a monitor can access only those variables declared locally within the monitor and its formal parameters. Similarly, the local variables of a monitor can be accessed by only the local functions.
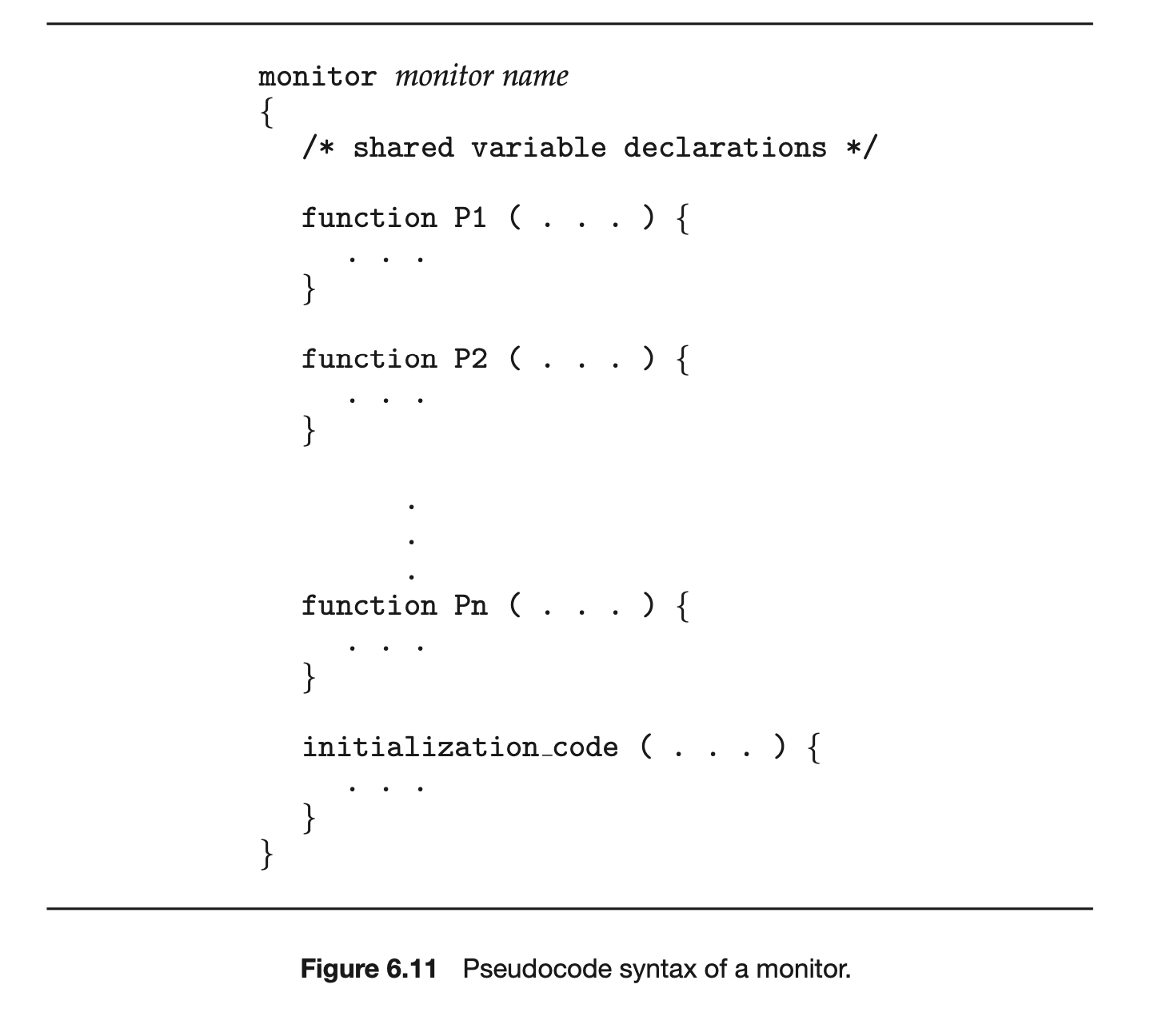 The monitor construct ensures that only one process at a time is active within the monitor. Consequently, the programmer does not need to code this synchronization constraint explicitly (Figure 6.12). However, the monitor construct, as defined so far, is not sufficiently powerful for modeling some synchronization schemes. For this purpose, we need to define additional synchronization mechanisms. These mechanisms are provided by the condition construct. A programmer who needs to write a tailor-made synchronization scheme can define one or more variables of type condition:
The monitor construct ensures that only one process at a time is active within the monitor. Consequently, the programmer does not need to code this synchronization constraint explicitly (Figure 6.12). However, the monitor construct, as defined so far, is not sufficiently powerful for modeling some synchronization schemes. For this purpose, we need to define additional synchronization mechanisms. These mechanisms are provided by the condition construct. A programmer who needs to write a tailor-made synchronization scheme can define one or more variables of type condition:
 The only operations that can be invoked on a condition variable are wait() and signal(). The operation
The only operations that can be invoked on a condition variable are wait() and signal(). The operation

means that the process invoking this operation is suspended until another process invokes

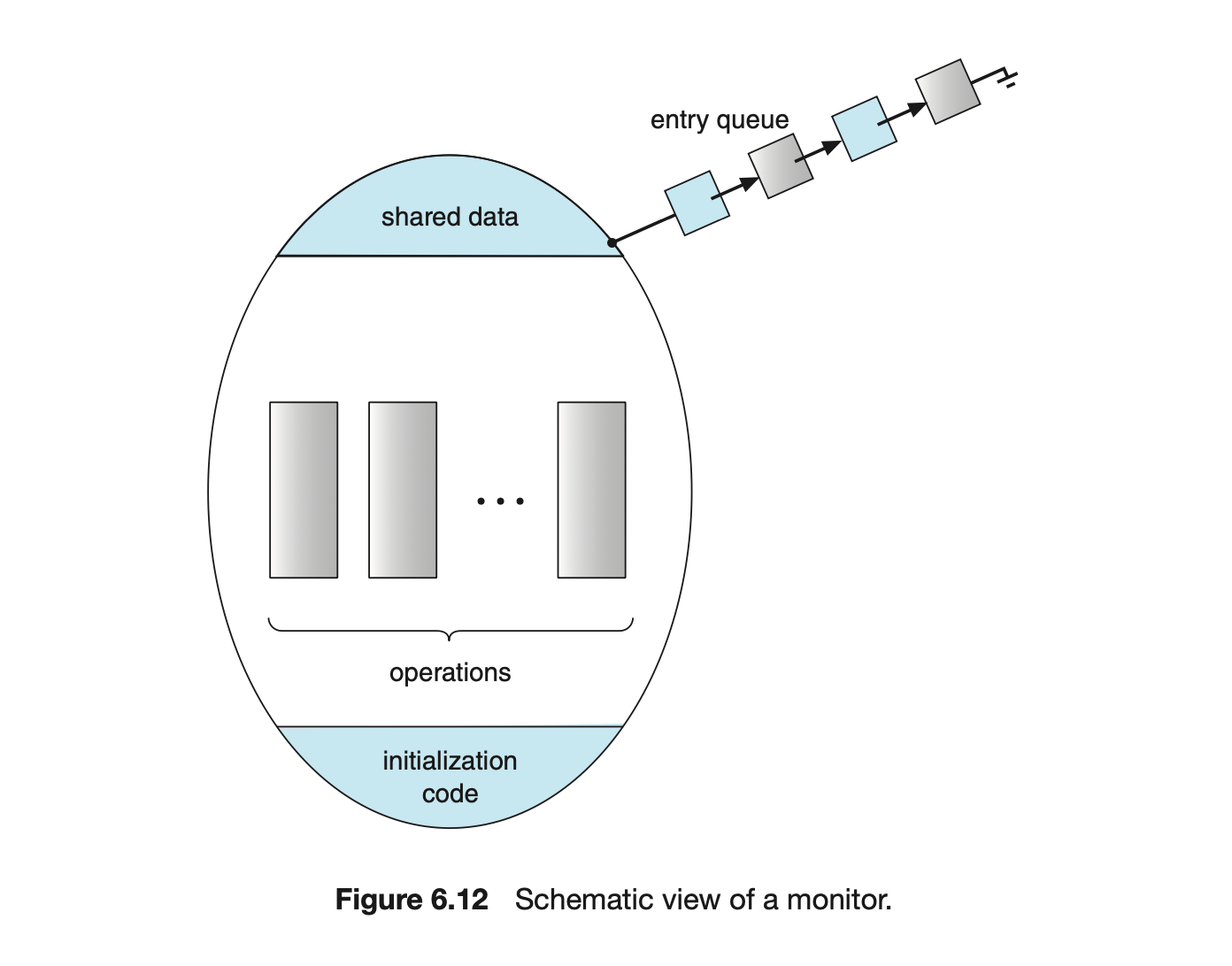
The x.signal() operation resumes exactly one suspended process. If no process is suspended, then the signal() operation has no effect; that is, the state of x is the same as if the operation had never been executed (Figure 6.13). Contrast this operation with the signal() operation associated with semaphores, which always affects the state of the semaphore.
Now suppose that, when the x.signal() operation is invoked by a process , there exists a suspended process associated with condition x. Clearly, if the suspended process is allowed to resume its execution, the signaling process must wait. Otherwise, both and would be active simultaneously within the monitor. Note, however, that conceptually both processes can continue with their execution. Two possibilities exist:
- Signal and wait. either waits until leaves the monitor or waits for another condition.
- Signal and continue. either waits until leaves the monitor or waits for another condition.
There are reasonable arguments in favor of adopting either option. On the one hand, since was already executing in the monitor, the signal-and-continue method seems more reasonable. On the other, if we allow thread to continue, then by the time is resumed, the logical condition for which was waiting may no longer hold. A compromise between these two choices exists as well: when thread executes the signal operation, it immediately leaves the monitor. Hence, is immediately resumed.
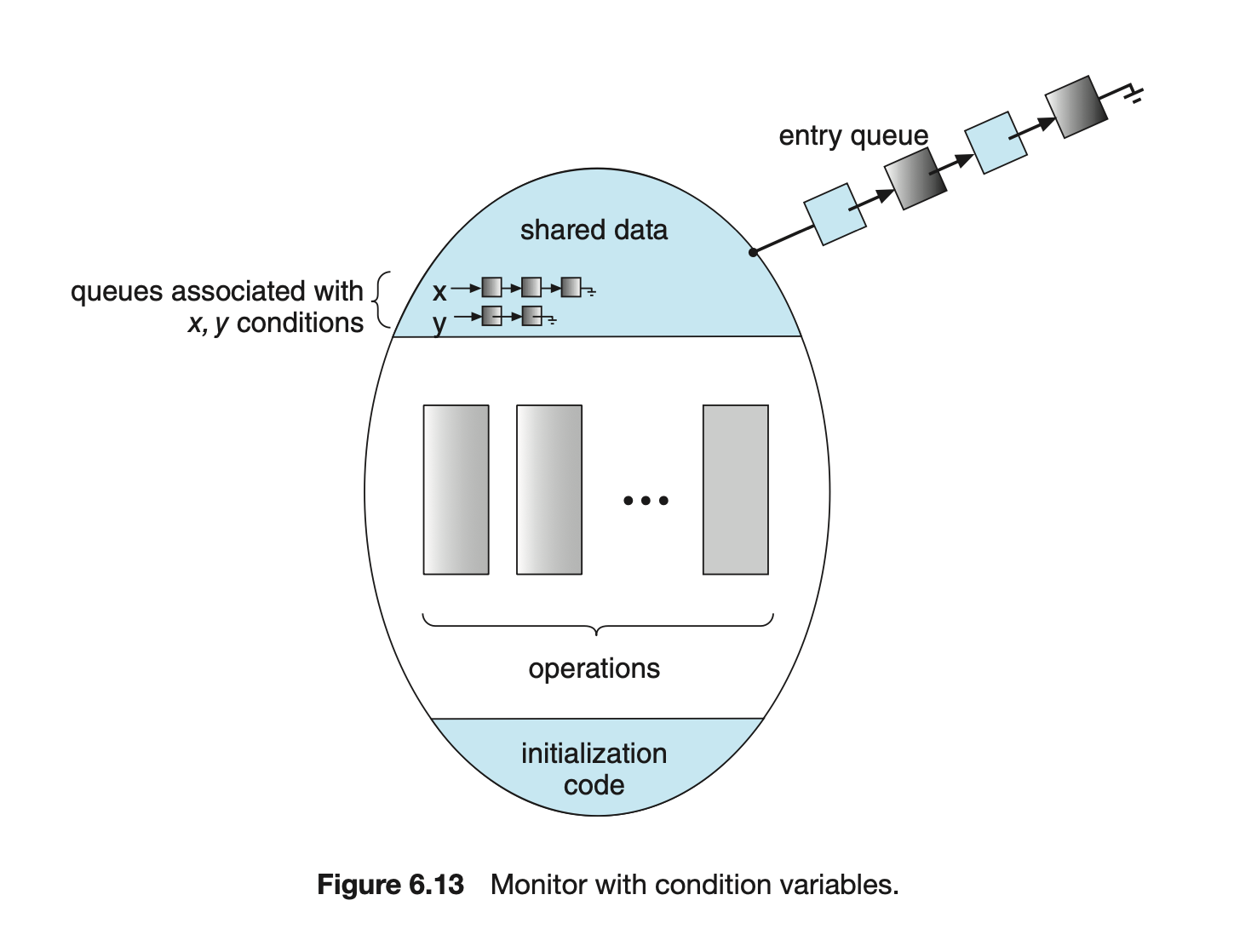 Many programming languages have incorporated the idea of the monitor as described in this section, including Java and C#. Other languages--such as Erlang--provide concurrency support using a similar mechanism.
Many programming languages have incorporated the idea of the monitor as described in this section, including Java and C#. Other languages--such as Erlang--provide concurrency support using a similar mechanism.
6.7.2 Implementing a Monitor Using Semaphores
We now consider a possible implementation of the monitor mechanism using semaphores. For each monitor, a binary semaphore mutex (initialized to 1) is provided to ensure mutual exclusion. A process must execute wait(mutex) before entering the monitor and must execute signal(mutex) after leaving the monitor.
We will use the signal-and-wait scheme in our implementation. Since a signaling process must wait until the resumed process either leaves or waits, an additional binary semaphore, next, is introduced, initialized to 0. The signaling processes can use next to suspend themselves. An integer variable next_count is also provided to count the number of processes suspended on next. Thus, each external function F is replaced by
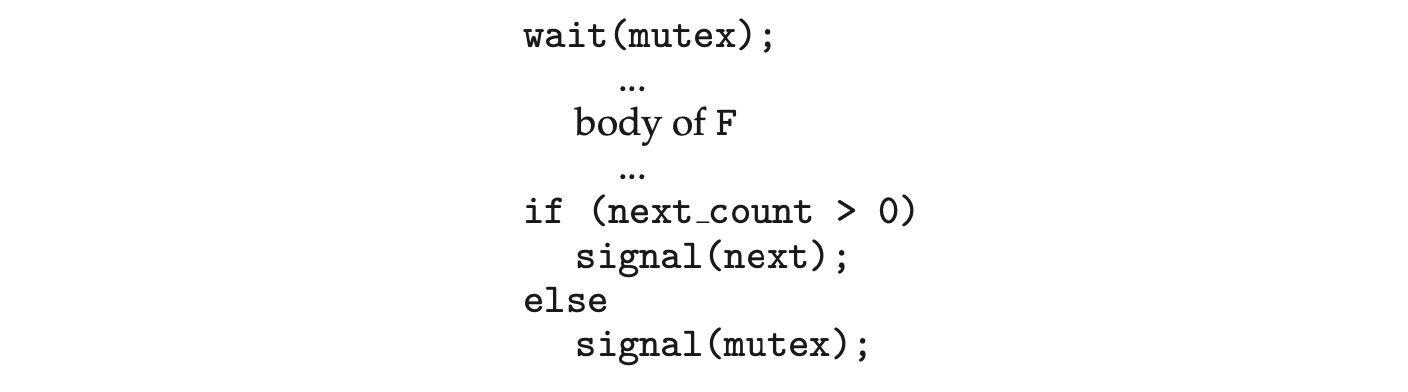
Mutual exclusion within a monitor is ensured. We can now describe how condition variables are implemented as well. For each condition x, we introduce a binary semaphore x_sem and an integer variable x_count, both initialized to 0. The operation x.wait() can now be implemented as
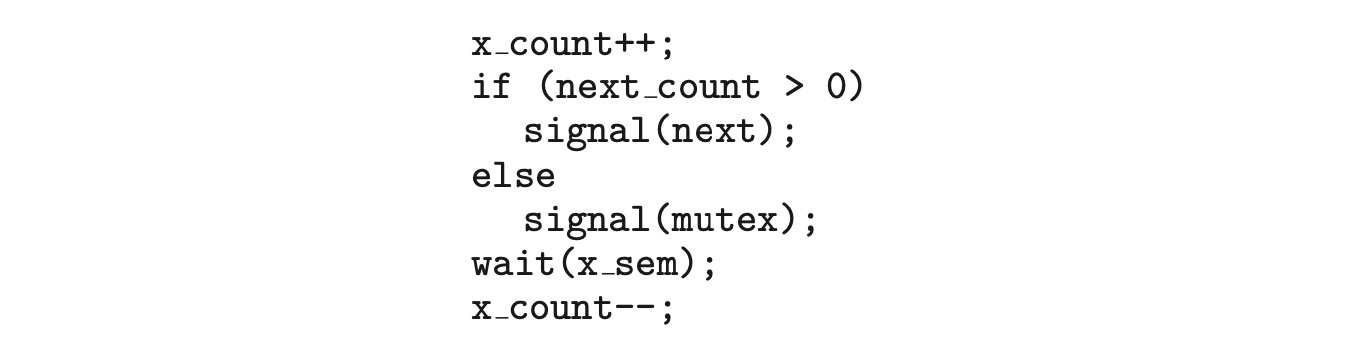 The operation x.signal() can be implemented as
The operation x.signal() can be implemented as
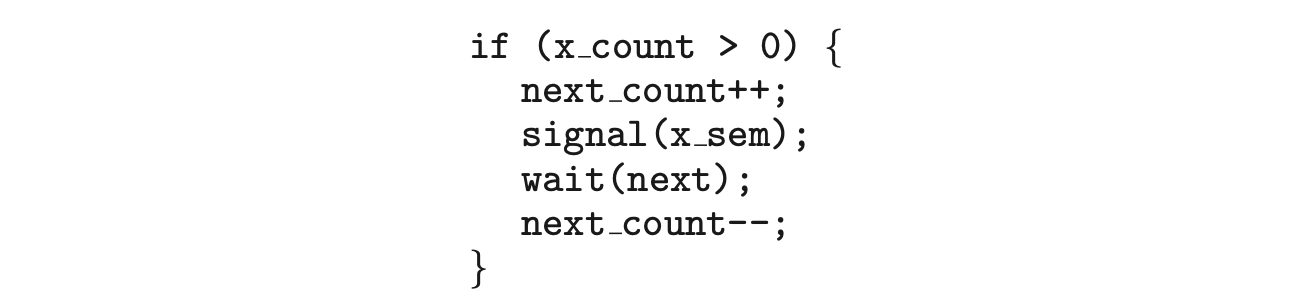 This implementation is applicable to the definitions of monitors given by both Hoare and Brinch-Hansen (see the bibliographical notes at the end of the chapter). In some cases, however, the generality of the implementation is unnecessary, and a significant improvement in efficiency is possible. We leave this problem to you in Exercise 6.27.
This implementation is applicable to the definitions of monitors given by both Hoare and Brinch-Hansen (see the bibliographical notes at the end of the chapter). In some cases, however, the generality of the implementation is unnecessary, and a significant improvement in efficiency is possible. We leave this problem to you in Exercise 6.27.
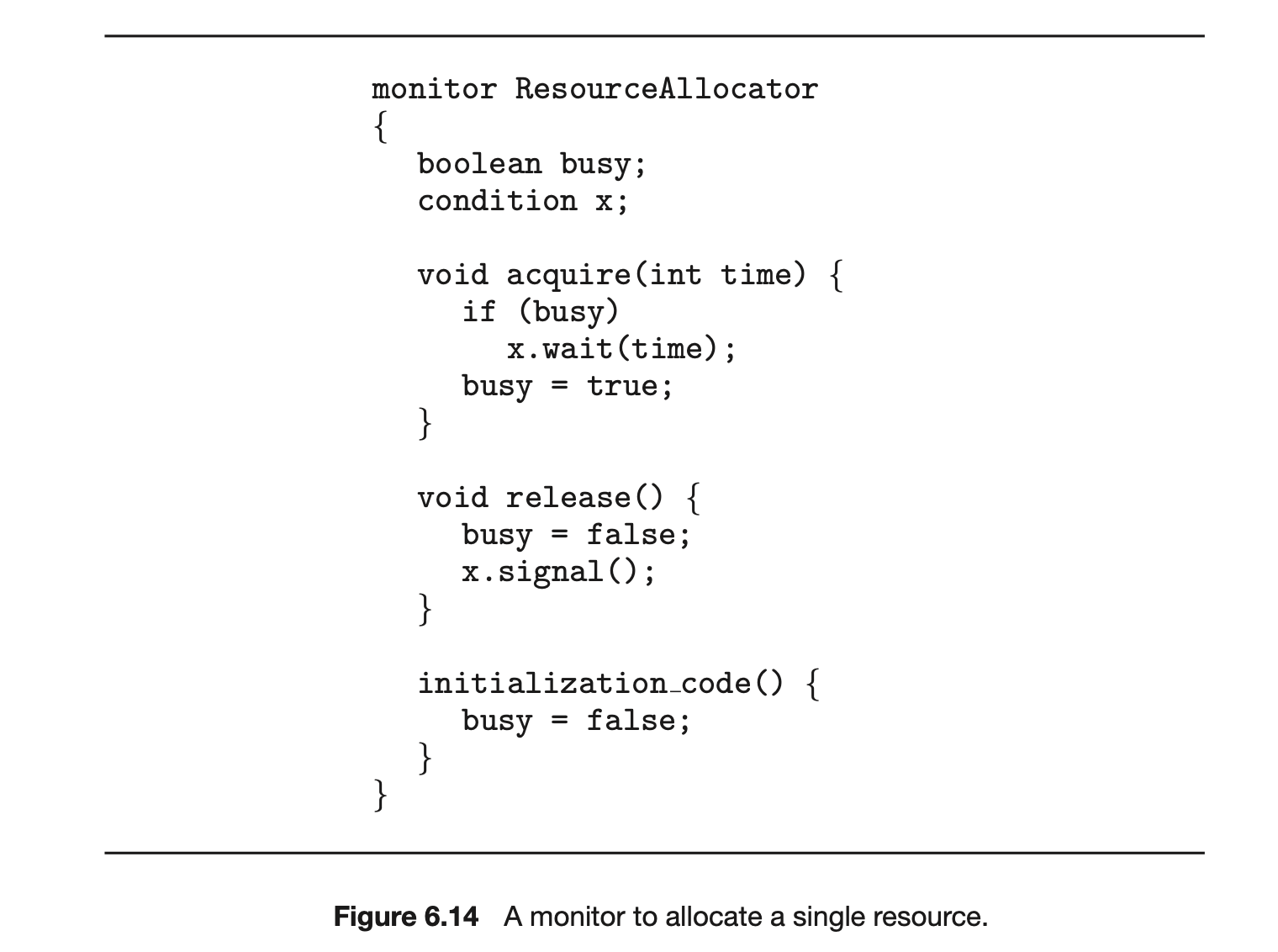
6.7.3 Resuming Processes within a Monitor
We turn now to the subject of process-resumption order within a monitor. If several processes are suspended on condition x, and an x.signal() operation is executed by some process, then how do we determine which of the suspended processes should be resumed next? One simple solution is to use a first-come, first-served (FCFS) ordering, so that the process that has been waiting the longest is resumed first. In many circumstances, however, such a simple scheduling scheme is not adequate. In these circumstances, the conditional-wait construct can be used. This construct has the form
 where c is an integer expression that is evaluated when the wait() operation is executed. The value of c, which is called a priority number, is then stored with the name of the process that is suspended. When
where c is an integer expression that is evaluated when the wait() operation is executed. The value of c, which is called a priority number, is then stored with the name of the process that is suspended. When x.signal() is executed, the process with the smallest priority number is resumed next.
To illustrate this new mechanism, consider the ResourceAllocator monitor shown in Figure 6.14, which controls the allocation of a single resource among competing processes. Each process, when requesting an allocation of this resource, specifies the maximum time it plans to use the resource. The monitor allocates the resource to the process that has the shortest time-allocation request. A process that needs to access the resource in question must observe the following sequence:
 where R is an instance of type ResourceAllocator. Unfortunately, the monitor concept cannot guarantee that the preceding access sequence will be observed. In particular, the following problems can occur:
where R is an instance of type ResourceAllocator. Unfortunately, the monitor concept cannot guarantee that the preceding access sequence will be observed. In particular, the following problems can occur:
- A process might access a resource without first gaining access permission to the resource.
- A process might never release a resource once it has been granted access to the resource.
- A process might attempt to release a resource that it never requested.
- A process might request the same resource twice (without first releasing the resource).
The same difficulties are encountered with the use of semaphores, and these difficulties are similar in nature to those that encouraged us to develop the monitor constructs in the first place. Previously, we had to worry about the correct use of semaphores. Now, we have to worry about the correct use of higher-level programmer-defined operations, with which the compiler can no longer assist us.
One possible solution to the current problem is to include the resource-access operations within the ResourceAllocator monitor. However, using this solution will mean that scheduling is done according to the built-in monitor-scheduling algorithm rather than the one we have coded.
To ensure that the processes observe the appropriate sequences, we must inspect all the programs that make use of the ResourceAllocator monitor and its managed resource. We must check two conditions to establish the correctness of this system. First, user processes must always make their calls on the monitor in a correct sequence. Second, we must be sure that an uncooperative process does not simply ignore the mutual-exclusion gateway provided by the monitor and try to access the shared resource directly, without using the access protocols. Only if these two conditions can be ensured can we guarantee that no time-dependent errors will occur and that the scheduling algorithm will not be defeated.
Although this inspection may be possible for a small, static system, it is not reasonable for a large system or a dynamic system. This access-control problem can be solved only through the use of the additional mechanisms that are described in Chapter 17.
6.8 Liveness
One consequence of using synchronization tools to coordinate access to critical sections is the possibility that a process attempting to enter its critical section will wait indefinitely. Recall that in Section 6.2, we outlined three criteria that solutions to the critical-section problem must satisfy. Indefinite waiting violates two of these --the progress and bounded-waiting criteria.
Liveness refers to a set of properties that a system must satisfy to ensure that processes make progress during their execution life cycle. A process waiting indefinitely under the circumstances just described is an example of a "liveness failure."
There are many different forms of liveness failure; however, all are generally characterized by poor performance and responsiveness. A very simple example of a liveness failure is an infinite loop. A busy wait loop presents the possibility of a liveness failure, especially if a process may loop an arbitrarily long period of time. Efforts at providing mutual exclusion using tools such as mutex locks and semaphores can often lead to such failures in concurrent programming. In this section, we explore two situations that can lead to liveness failures.
6.8.1 Deadlock
The implementation of a semaphore with a waiting queue may result in a situation where two or more processes are waiting indefinitely for an event that can be caused only by one of the waiting processes. The event in question is the execution of a signal() operation. When such a state is reached, these processes are said to be deadlocked.
To illustrate this, consider a system consisting of two processes, and , each accessing two semaphores, S and Q, set to the value 1:
 Suppose that executes
Suppose that executes wait(S) and then executes wait(Q). When executes wait(Q), it must wait until executes signal(Q). Similarly, when executes wait(S), it must wait until executes signal(S). Since these signal() operations cannot be executed, and are deadlocked.
We say that a set of processes is in a deadlocked state when every process in the set is waiting for an event that can be caused only by another process in the set. The “events” with which we are mainly concerned here are the acquisition and release of resources such as mutex locks and semaphores. Other types of events may result in deadlocks, as we show in more detail in Chapter 8. In that chapter, we describe various mechanisms for dealing with the deadlock problem, as well as other forms of liveness failures.
6.8.2 Priority Inversion
A scheduling challenge arises when a higher-priority process needs to read or modify kernel data that are currently being accessed by a lower-priority process--or a chain of lower-priority processes. Since kernel data are typically protected with a lock, the higher-priority process will have to wait for a lower-priority one to finish with the resource. The situation becomes more complicated if the lower-priority process is preempted in favor of another process with a higher priority.
As an example, assume we have three processes--, , and --whose priorities follow the order . Assume that process requires a semaphore , which is currently being accessed by process . Ordinarily, process would wait for to finish using resource . However, now suppose that process becomes runnable, thereby preempting process . Indirectly, a process with a lower priority--process --has affected how long process must wait for to relinquish resource .
This liveness problem is known as priority inversion, and it can occur only in systems with more than two priorities. Typically, priority inversion is avoided by implementing a priority-inheritance protocol. According to this protocol, all processes that are accessing resources needed by a higher-priority process inherit the higher priority until they are finished with the resources in question. When they are finished, their priorities revert to their original values. In the example above, a priority-inheritance protocol would allow process to temporarily inherit the priority of process , thereby preventing process from preempting its execution. When process had finished using resource , it would relinquish its inherited priority from and assume its original priority. Because resource would now be available, process --not --would run next.
6.9 Evaluation
We have described several different synchronization tools that can be used to solve the critical-section problem. Given correct implementation and usage, these tools can be used effectively to ensure mutual exclusion as well as address liveness issues. With the growth of concurrent programs that leverage the power of modern multicore computer systems, increasing attention is being paid to the performance of synchronization tools. Trying to identify when to use which tool, however, can be a daunting challenge. In this section, we present some simple strategies for determining when to use specific synchronization tools.
The hardware solutions outlined in Section 6.4 are considered very low level and are typically used as the foundations for constructing other synchronization tools, such as mutex locks. However, there has been a recent focus on using the CAS instruction to construct lock-free algorithms that provide protection from race conditions without requiring the overhead of locking. Although these lock-free solutions are gaining popularity due to low overhead
Priority inversion and the Mars Pathfinder
Priority inversion can be more than a scheduling inconvenience. On systems with tight time constraints--such as real-time systems--priority inversion can cause a process to take longer than it should to accomplish a task. When that happens, other failures can cascade, resulting in system failure.
Consider the Mars Pathfinder, a NASA space probe that landed a robot, the Sojourner rover, on Mars in 1997 to conduct experiments. Shortly after the Sojourner began operating, it started to experience frequent computer resets. Each reset reinitialized all hardware and software, including communications. If the problem had not been solved, the Sojourner would have failed in its mission.
The problem was caused by the fact that one high-priority task, "bc_dist," was taking longer than expected to complete its work. This task was being forced to wait for a shared resource that was held by the lower-priority "ASI/MET" task, which in turn was preempted by multiple medium-priority tasks. The "bc_dist" task would stall waiting for the shared resource, and ultimately the "bc_sched" task would discover the problem and perform the reset. The Sojourner was suffering from a typical case of priority inversion.
The operating system on the Sojourner was the VxWorks real-time operating system, which had a global variable to enable priority inheritance on all semaphores. After testing, the variable was set on the Sojourner (on Mars!), and the problem was solved.
A full description of the problem, its detection, and its solution was written by the software team lead and is available at http://research.microsoft.com/en-us/um/people/mbj/mars_pathfinder/authoritative.account.html.
and ability to scale, the algorithms themselves are often difficult to develop and test. (In the exercises at the end of this chapter, we ask you to evaluate the correctness of a lock-free stack.)
CAS-based approaches are considered an optimistic approach--you optimistically first update a variable and then use collision detection to see if another thread is updating the variable concurrently. If so, you repeatedly retry the operation until it is successfully updated without conflict. Mutual-exclusion locking, in contrast, is considered a pessimistic strategy; you assume another thread is concurrently updating the variable, so you pessimistically acquire the lock before making any updates.
The following guidelines identify general rules concerning performance differences between CAS-based synchronization and traditional synchronization (such as mutex locks and semaphores) under varying contention loads:
- Uncontended. Although both options are generally fast, CAS protection will be somewhat faster than traditional synchronization.
- Moderate contention. CAS protection will be faster--possibly much faster --than traditional synchronization.
- High contention. Under very highly contended loads, traditional synchronization will ultimately be faster than CAS-based synchronization.
Moderate contention is particularly interesting to examine. In this scenario, the CAS operation succeeds most of the time, and when it fails, it will iterate through the loop shown in Figure 6.8 only a few times before ultimately succeeding. By comparison, with mutual-exclusion locking, any attempt to acquire a contended lock will result in a more complicated -- and time-intensive -- code path that suspends a thread and places it on a wait queue, requiring a context switch to another thread.
The choice of a mechanism that addresses race conditions can also greatly affect system performance. For example, atomic integers are much lighter weight than traditional locks, and are generally more appropriate than mutex locks or semaphores for single updates to shared variables such as counters. We also see this in the design of operating systems where spinlocks are used on multiprocessor systems when locks are held for short durations. In general, mutex locks are simpler and require less overhead than semaphores and are preferable to binary semaphores for protecting access to a critical section. However, for some uses--such as controlling access to a finite number of resources--a counting semaphore is generally more appropriate than a mutex lock. Similarly, in some instances, a reader-writer lock may be preferred over a mutex lock, as it allows a higher degree of concurrency (that is, multiple readers).
The appeal of higher-level tools such as monitors and condition variables is based on their simplicity and ease of use. However, such tools may have significant overhead and, depending on their implementation, may be less likely to scale in highly contended situations.
Fortunately, there is much ongoing research toward developing scalable, efficient tools that address the demands of concurrent programming. Some examples include:
- Designing compilers that generate more efficient code.
- Developing languages that provide support for concurrent programming.
- Improving the performance of existing libraries and APIs.
In the next chapter, we examine how various operating systems and APIs available to developers implement the synchronization tools presented in this chapter.
6.10 Summary
- A race condition occurs when processes have concurrent access to shared data and the final result depends on the particular order in which concurrent accesses occur. Race conditions can result in corrupted values of shared data.
- A critical section is a section of code where shared data may be manipulated and a possible race condition may occur. The critical-section problemis to design a protocol whereby processes can synchronize their activity to cooperatively share data.
- A solution to the critical-section problem must satisfy the following three requirements: (1) mutual exclusion, (2) progress, and (3) bounded waiting. Mutual exclusion ensures that only one process at a time is active in its critical section. Progress ensures that programs will cooperatively determine what process will next enter its critical section. Bounded waiting limits how much time a program will wait before it can enter its critical section.
- Software solutions to the critical-section problem, such as Peterson's solution, do not work well on modern computer architectures.
- Hardware support for the critical-section problem includes memory barriers; hardware instructions, such as the compare-and-swap instruction; and atomic variables.
- A mutex lock provides mutual exclusion by requiring that a process acquire a lock before entering a critical section and release the lock on exiting the critical section.
- Semaphores, like mutex locks, can be used to provide mutual exclusion. However, whereas a mutex lock has a binary value that indicates if the lock is available or not, a semaphore has an integer value and can therefore be used to solve a variety of synchronization problems.
- A monitor is an abstract data type that provides a high-level form of process synchronization. A monitor uses condition variables that allow processes to wait for certain conditions to become true and to signal one another when conditions have been set to true.
- Solutions to the critical-section problem may suffer from liveness problems, including deadlock.
- The various tools that can be used to solve the critical-section problem as well as to synchronize the activity of processes can be evaluated under varying levels of contention. Some tools work better under certain contention loads than others.
Practice Exercises
6.1 In Section 6.4, we mentioned that disabling interrupts frequently can affect the system's clock. Explain why this can occur and how such effects can be minimized.
6.2 What is the meaning of the term busy waiting? What other kinds of waiting are there in an operating system? Can busy waiting be avoided altogether? Explain your answer.
6.3 Explain why spinlocks are not appropriate for single-processor systems yet are often used in multiprocessor systems.
6.4 Show that, if the wait() and signal() semaphore operations are not executed atomically, then mutual exclusion may be violated.
6.5 Illustrate how a binary semaphore can be used to implement mutual exclusion among processes.
6.6 Race conditions are possible in many computer systems. Consider a banking system that maintains an account balance with two functions: deposit(amount) and withdraw(amount). These two functions are passed the amount that is to be deposited or withdrawn from the bank account balance. Assume that a husband and wife share a bank account. Concurrently, the husband calls the withdraw() function, and the wife calls deposit(). Describe how a race condition is possible and what might be done to prevent the race condition from occurring.
Further Reading
The mutual-exclusion problem was first discussed in a classic paper by [Dijkstra (1965)]. The semaphore concept was suggested by [Dijkstra (1965)]. The monitor concept was developed by [Brinch-Hansen (1973)]. [Hoare (1974)] gave a complete description of the monitor.
For more on the Mars Pathfinder problem see http://research.microsoft.co m/en-us/um/people/mbj/mars_pathfinder/authoritative_account.html
A thorough discussion of memory barriers and cache memory is presented in [Mckenney (2010)]. [Herlihy and Shavit (2012)] presents details on several issues related to multiprocessor programming, including memory models and compare-and-swap instructions. [Bahra (2013)] examines nonblocking algorithms on modern multicore systems.
Bibliography
[Bahra (2013)]: S. A. Bahra, "Nonblocking Algorithms and Scalable Multicore Programming", ACM queue, Volume 11, Number 5 (2013). [Brinch-Hansen (1973)]: P. Brinch-Hansen, Operating System Principles, Prentice Hall (1973). [Dijkstra (1965)]: E. W. Dijkstra, "Cooperating Sequential Processes", Technical report, Technological University, Eindhoven, the Netherlands (1965). [Herlihy and Shavit (2012)]: M. Herlihy and N. Shavit, The Art of Multiprocessor Programming, Revised First Edition, Morgan Kaufmann Publishers Inc. (2012). [Hoare (1974)]: C. A. R. Hoare, "Monitors: An Operating System Structuring Concept", Communications of the ACM, Volume 17, Number 10 (1974), pages 549-557. [Mckenney (2010)]: P. E. Mckenney, "Memory Barriers: a Hardware View for Software Hackers" (2010).
Chapter 6 Exercises
6.7 The pseudocode of Figure 6.15 illustrates the basic push() and pop() operations of an array-based stack. Assuming that this algorithm could be used in a concurrent environment, answer the following questions:
a. What data have a race condition? b. How could the race condition be fixed?
6.8 Race conditions are possible in many computer systems. Consider an online auction system where the current highest bid for each item must be maintained. A person who wishes to bid on an item calls the bid(amount) function, which compares the amount being bid to the current highest bid. If the amount exceeds the current highest bid, the highest bid is set to the new amount. This is illustrated below:

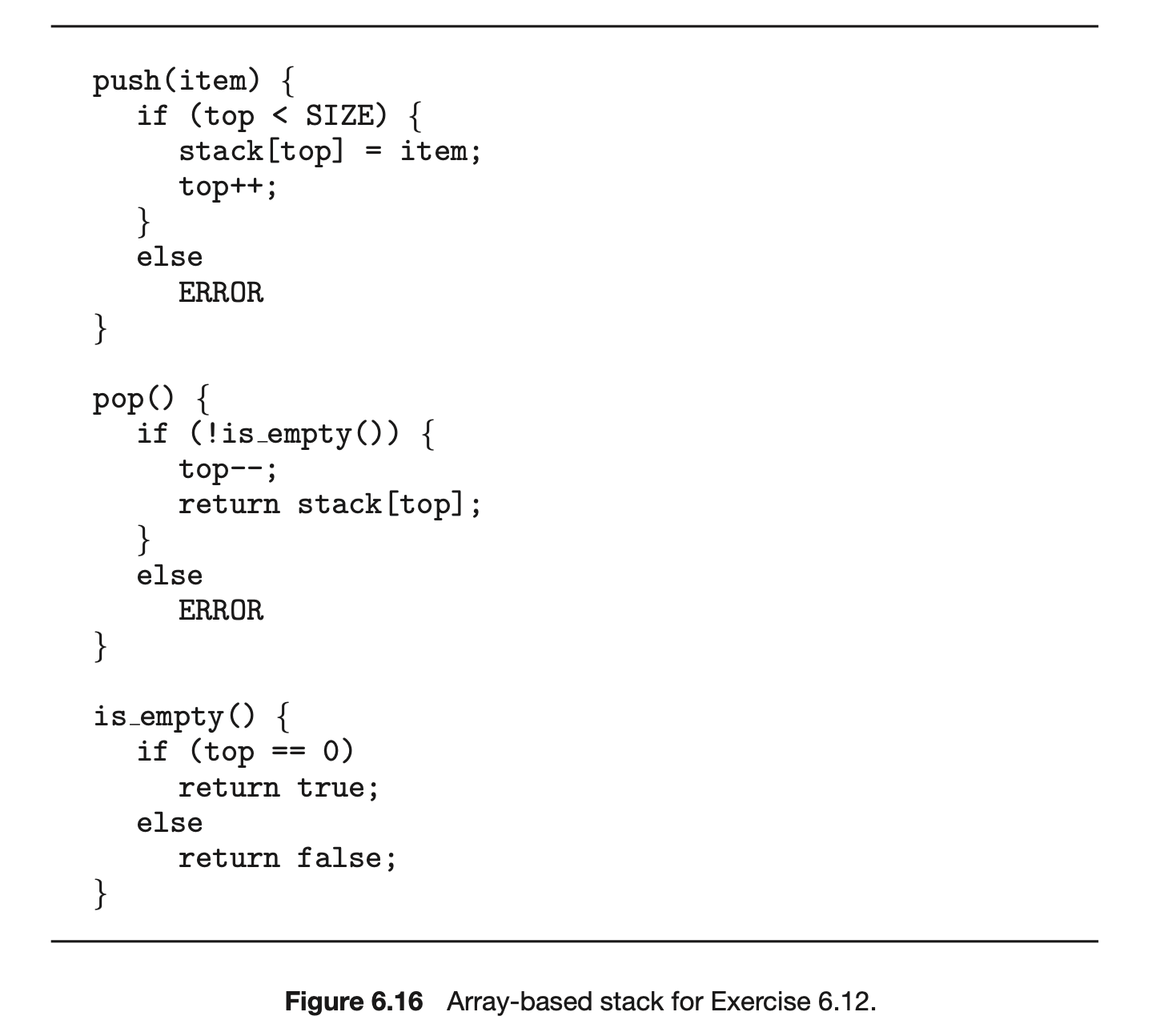
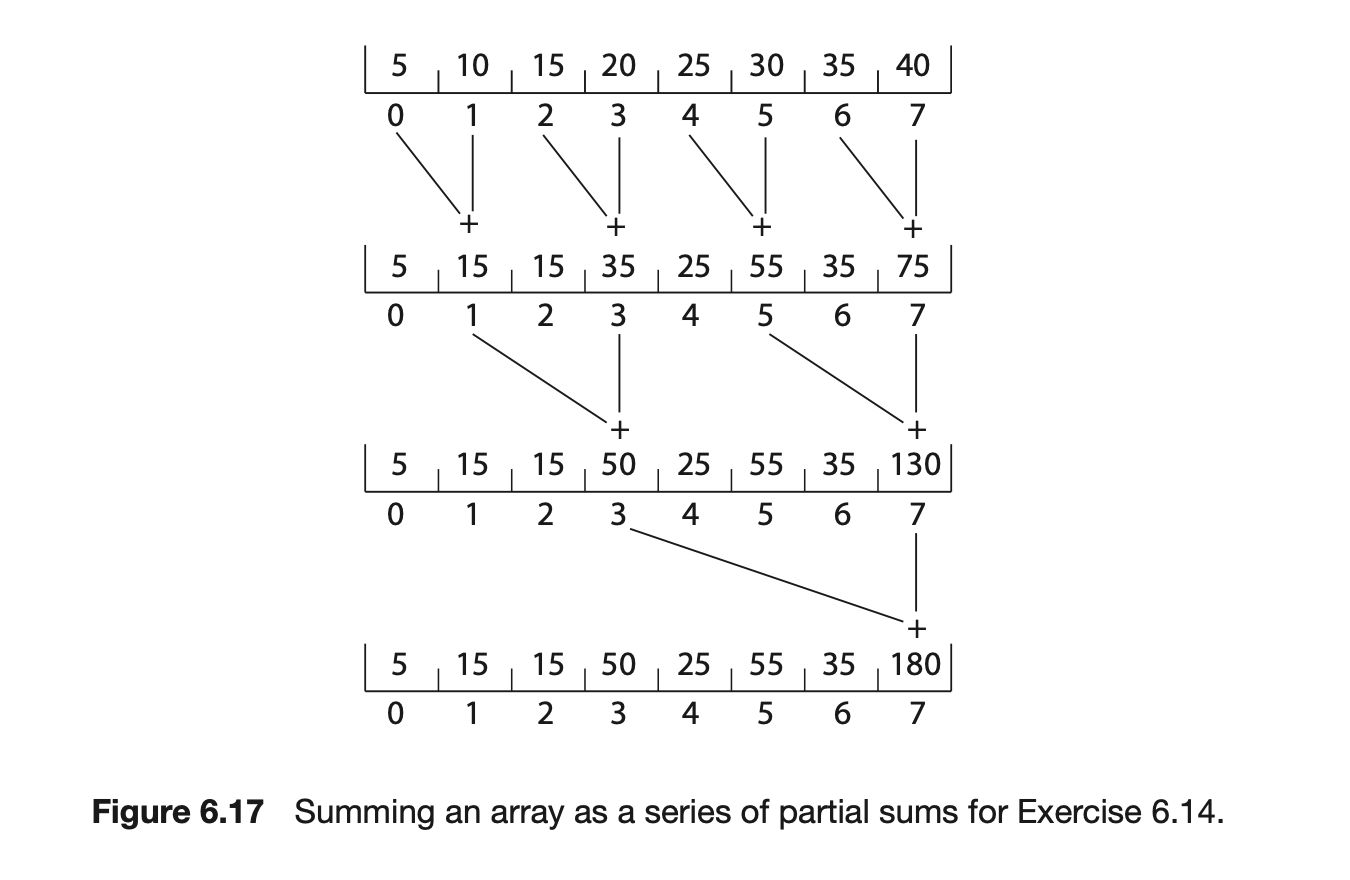
Describe how a race condition is possible in this situation and what might be done to prevent the race condition from occurring.
6.9 The following program example can be used to sum the array values of size elements in parallel on a system containing computing cores (there is a separate processor for each array element):
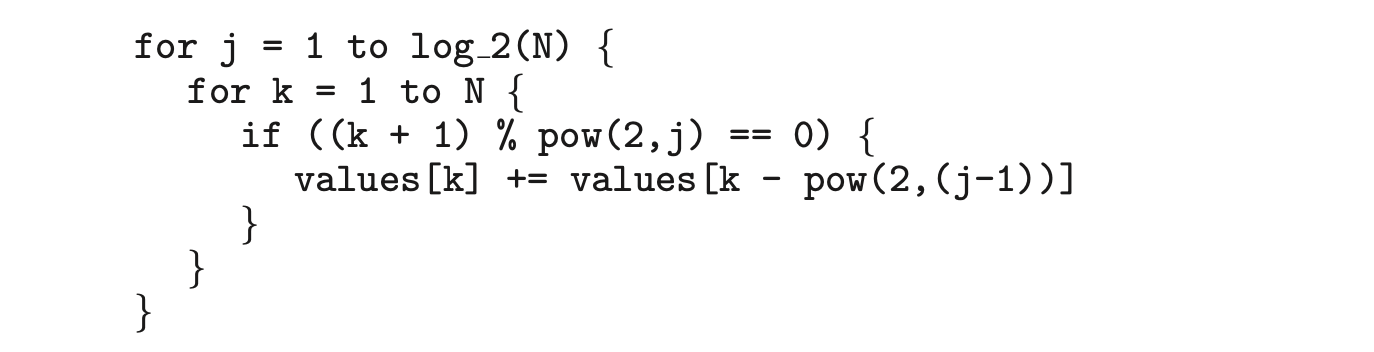 This has the effect of summing the elements in the array as a series of partial sums, as shown in Figure 6.16. After the code has executed, the sum of all elements in the array is stored in the last array location. Are there any race conditions in the above code example? If so, identify where they occur and illustrate with an example. If not, demonstrate why this algorithm is free from race conditions.
This has the effect of summing the elements in the array as a series of partial sums, as shown in Figure 6.16. After the code has executed, the sum of all elements in the array is stored in the last array location. Are there any race conditions in the above code example? If so, identify where they occur and illustrate with an example. If not, demonstrate why this algorithm is free from race conditions.
6.10 The compare_and_swap() instruction can be used to design lock-free data structures such as stacks, queues, and lists. The program example shown in Figure 6.17 presents a possible solution to a lock-free stack using CAS instructions, where the stack is represented as a linked list of Node elements with top representing the top of the stack. Is this implementation free from race conditions?
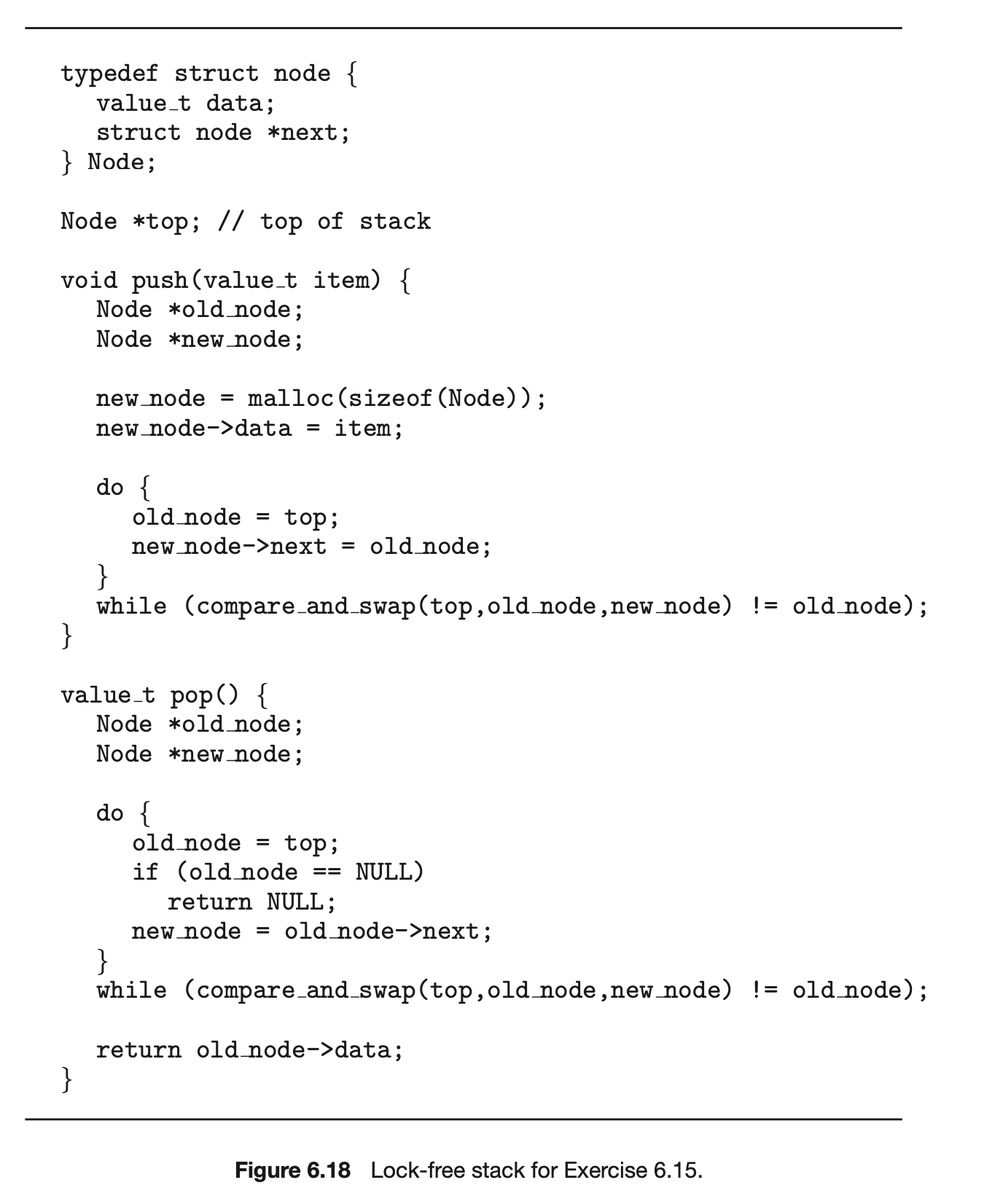 6.11 One approach for using compare and swap() for implementing a spin-lock is as follows:
6.11 One approach for using compare and swap() for implementing a spin-lock is as follows:

A suggested alternative approach is to use the “compare and compare- and-swap” idiom, which checks the status of the lock before invoking the compare_and_swap() operation. (The rationale behind this approach is to invoke compare_and_swap()only if the lock is currently available.) This strategy is shown below:
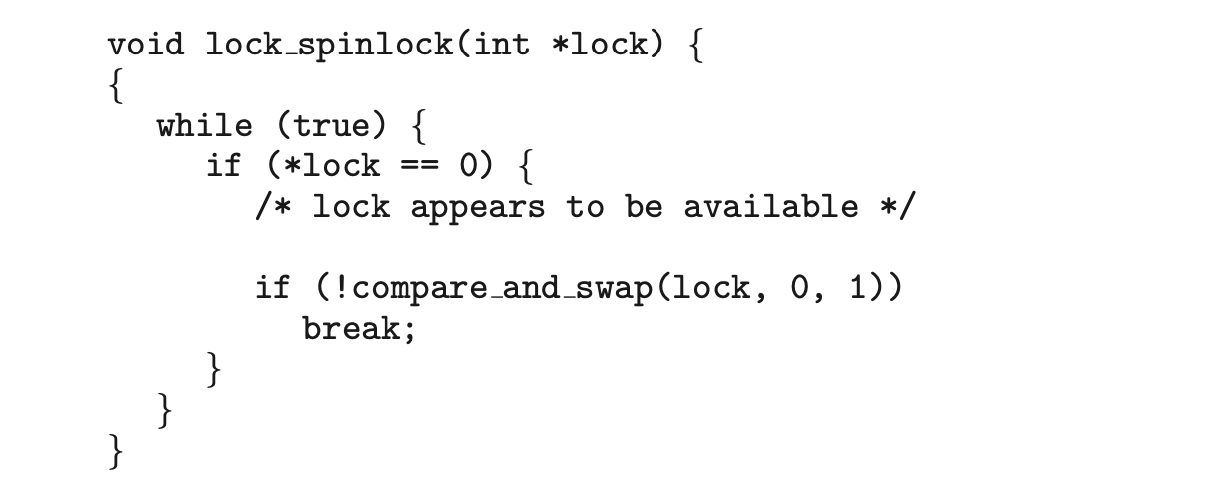 Does this "compare and compare-and-swap" idiom work appropriately for implementing spinlocks? If so, explain. If not, illustrate how the integrity of the lock is compromised.
Does this "compare and compare-and-swap" idiom work appropriately for implementing spinlocks? If so, explain. If not, illustrate how the integrity of the lock is compromised.
6.12 Some semaphore implementations provide a function getValue() that returns the current value of a semaphore. This function may, for instance, be invoked prior to calling wait() so that a process will only call wait() if the value of the semaphore is > 0, thereby preventing blocking while waiting for the semaphore. For example:
 Many developers argue against such a function and discourage its use. Describe a potential problem that could occur when using the function getValue() in this scenario.
Many developers argue against such a function and discourage its use. Describe a potential problem that could occur when using the function getValue() in this scenario.
6.13 The first known correct software solution to the critical-section problem for two processes was developed by Dekker. The two processes, and , share the following variables:
 The structure of process (i == 0 or 1) is shown in Figure 6.18. The other process is (j == 1 or 0). Prove that the algorithm satisfies all three requirements for the critical-section problem.
The structure of process (i == 0 or 1) is shown in Figure 6.18. The other process is (j == 1 or 0). Prove that the algorithm satisfies all three requirements for the critical-section problem.
6.14 The first known correct software solution to the critical-section problem for processes with a lower bound on waiting of turns was presented by Eisenberg and McGuire. The processes share the following variables:

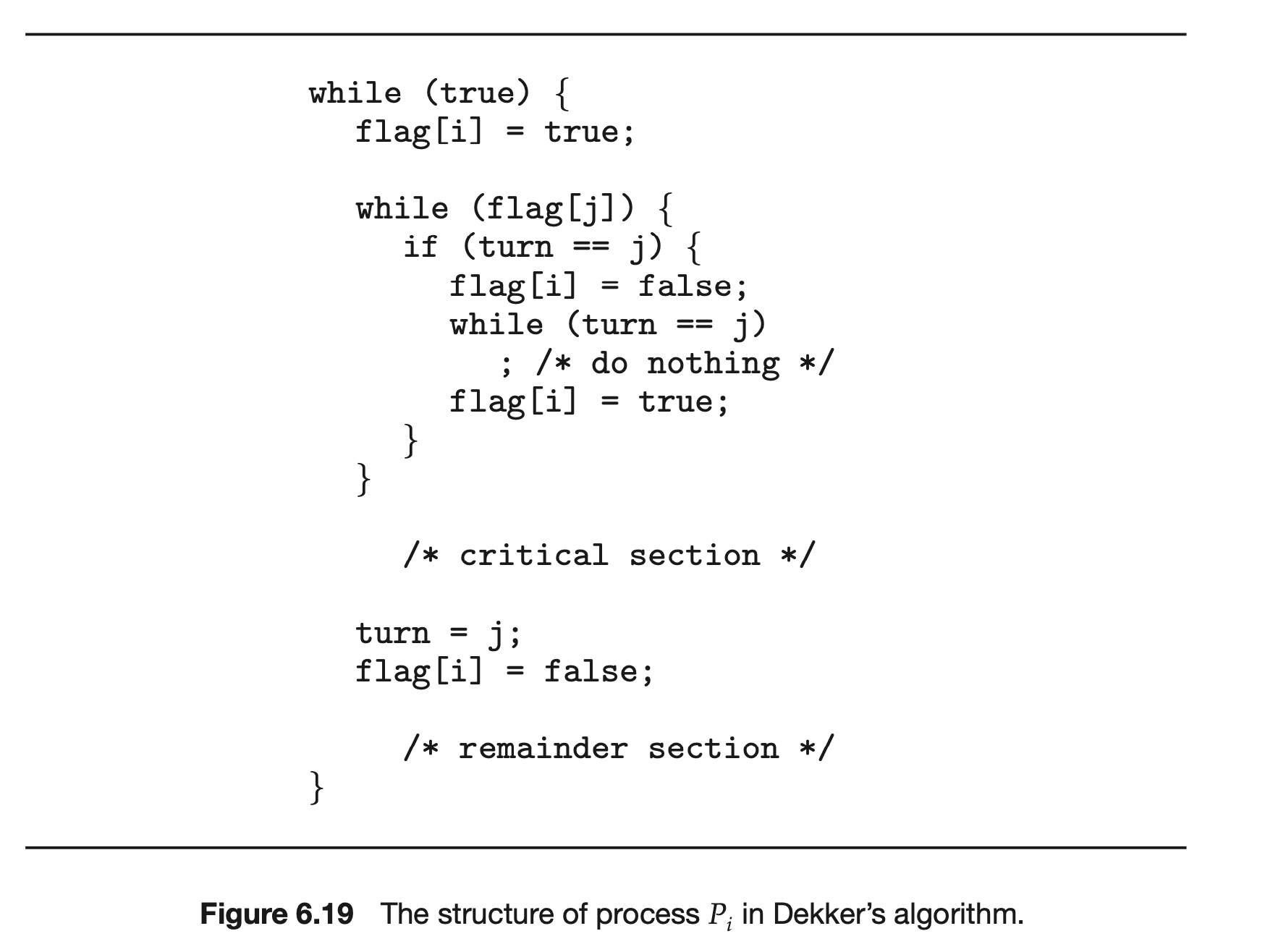 All the elements of flag are initially idle. The initial value of turn is immaterial (between 0 and n-1). The structure of process is shown in Figure 6.19. Prove that the algorithm satisfies all three requirements for the critical-section problem.
All the elements of flag are initially idle. The initial value of turn is immaterial (between 0 and n-1). The structure of process is shown in Figure 6.19. Prove that the algorithm satisfies all three requirements for the critical-section problem.
6.15: Explain why implementing synchronization primitives by disabling interrupts is not appropriate in a single-processor system if the synchronization primitives are to be used in user-level programs.
6.16: Consider how to implement a mutex lock using the compare_and_swap() instruction. Assume that the following structure defining the mutex lock is available:

The value (available == 0) indicates that the lock is available, and a value of 1 indicates that the lock is unavailable. Using this struct, illustrate how the following functions can be implemented using the compare_and_swap() instruction:
- void acquire(lock *mutex)
- void release(lock *mutex)
Be sure to include any initialization that may be necessary.
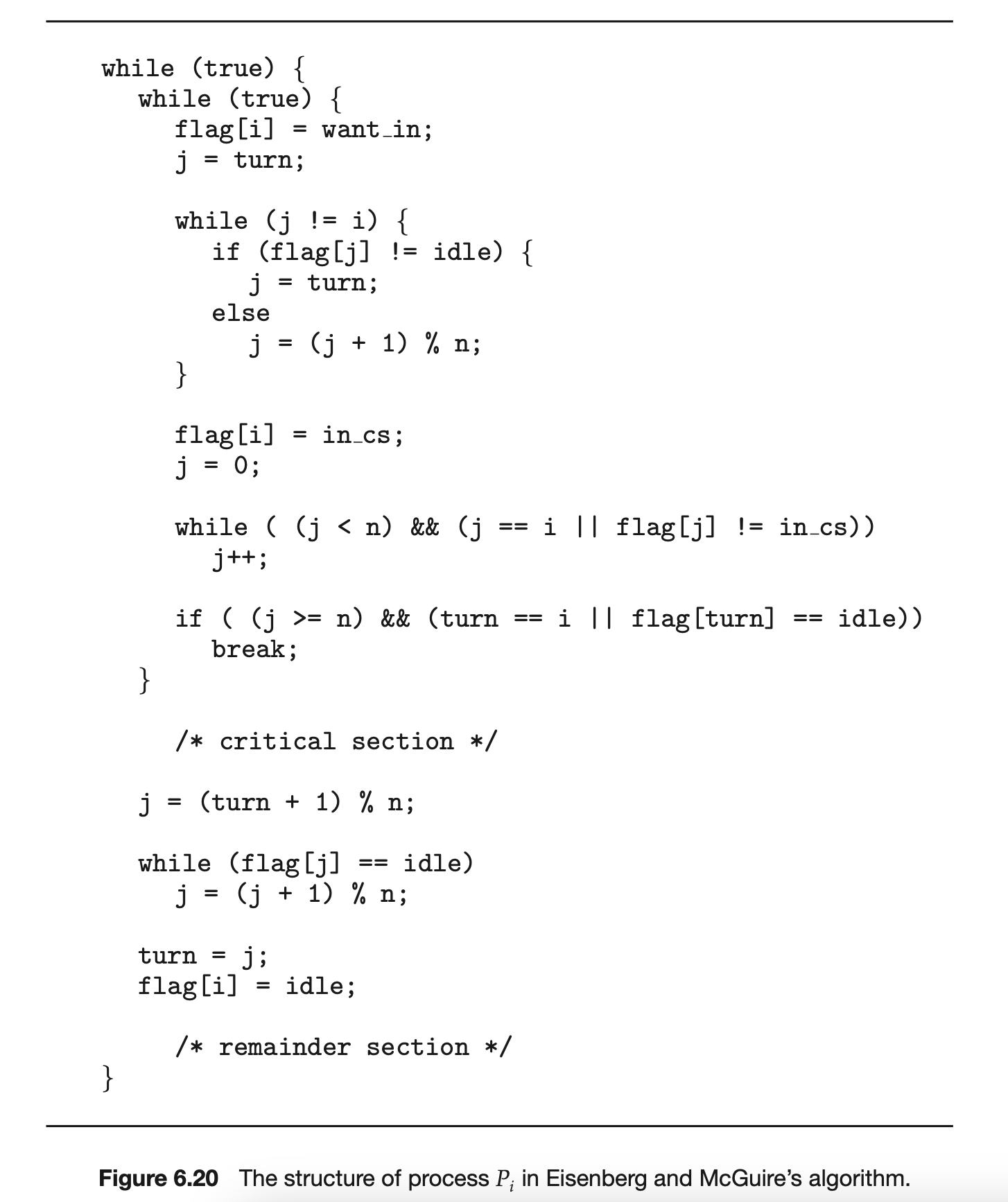
6.17 Explain why interrupts are not appropriate for implementing synchro- nization primitives in multiprocessor systems.
6.18 The implementation of mutex locks provided in Section 6.5 suffers from busy waiting. Describe what changes would be necessary so that a process waiting to acquire a mutex lock would be blocked and placed into a waiting queue until the lock became available.
6.19 Assume that a system has multiple processing cores. For each of the following scenarios, describe which is a better locking mechanism—a spinlock or a mutex lock where waiting processes sleep while waiting for the lock to become available:
- The lock is to be held for a short duration.
- The lock is to be held for a long duration.
- A thread may be put to sleep while holding the lock.
6.20 Assume that a context switch takes time. Suggest an upper bound (in terms of ) for holding a spinlock. If the spinlock is held for any longer, a mutex lock (where waiting threads are put to sleep) is a better alternative.
6.21 A multithreaded web server wishes to keep track of the number of requests it services (known as hits). Consider the two following strategies to prevent a race condition on the variable hits. The first strategy is to use a basic mutex lock when updating hits:
 A second strategy is to use an atomic integer:
A second strategy is to use an atomic integer:
 Explain which of these two strategies is more efficient.
Explain which of these two strategies is more efficient.
6.22 Consider the code example for allocating and releasing processes shown in Figure 6.20.
a. Identify the race condition(s).
b. Assume you have a mutex lock named mutex with the operations acquire() and release(). Indicate where the locking needs to be placed to prevent the race condition(s).
c. Could we replace the integer variable
 with the atomic integer
with the atomic integer
 to prevent the race condition(s)?
to prevent the race condition(s)?
6.23 Servers can be designed to limit the number of open connections. For example, a server may wish to have only socket connections at any point in time. As soon as connections are made, the server will not accept another incoming connection until an existing connection is released. Illustrate how semaphores can be used by a server to limit the number of concurrent connections.
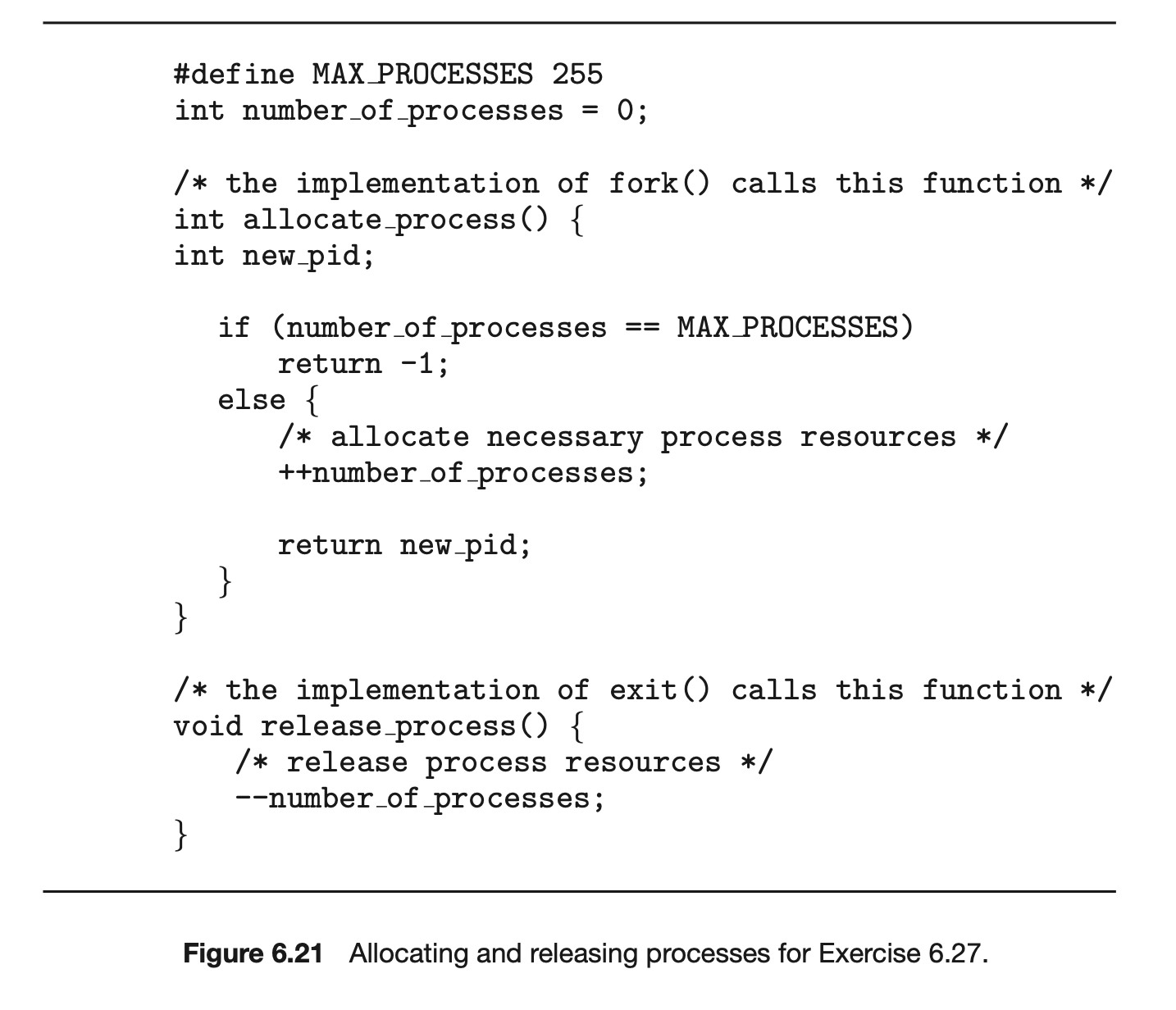 6.24 In Section 6.7, we use the following illustration as an incorrect use of semaphores to solve the critical-section problem:
6.24 In Section 6.7, we use the following illustration as an incorrect use of semaphores to solve the critical-section problem:
 Explain why this is an example of a liveness failure.
Explain why this is an example of a liveness failure.
6.25 Demonstrate that monitors and semaphores are equivalent to the degree that they can be used to implement solutions to the same types of synchronization problems.
6.26 Describe how the signal() operation associated with monitors differs from the corresponding operation defined for semaphores.
6.27 Suppose the signal() statement can appear only as the last statement in a monitor function. Suggest how the implementation described in Section 6.7 can be simplified in this situation.
6.28 Consider a system consisting of processes , each of which has a unique priority number. Write a monitor that allocates three identical printers to these processes, using the priority numbers for deciding the order of allocation.
6.29 A file is to be shared among different processes, each of which has a unique number. The file can be accessed simultaneously by several processes, subject to the following constraint: the sum of all unique numbers associated with all the processes currently accessing the file must be less than . Write a monitor to coordinate access to the file.
6.30 When a signal is performed on a condition inside a monitor, the signaling process can either continue its execution or transfer control to the process that is signaled. How would the solution to the preceding exercise differ with these two different ways in which signaling can be performed?
6.31 Design an algorithm for a monitor that implements an alarm clock that enables a calling program to delay itself for a specified number of time units (ticks). You may assume the existence of a real hardware clock that invokes a function tick() in your monitor at regular intervals.
6.32 Discuss ways in which the priority inversion problem could be addressed in a real-time system. Also discuss whether the solutions could be implemented within the context of a proportional share scheduler.
Synchronization Examples
In Chapter 6, we presented the critical-section problem and focused on how race conditions can occur when multiple concurrent processes share data. We went on to examine several tools that address the critical-section problem by preventing race conditions from occurring. These tools ranged from low-level hardware solutions (such as memory barriers and the compare-and-swap oper- ation) to increasingly higher-level tools (from mutex locks to semaphores to monitors). We also discussed various challenges in designing applications that are free from race conditions, including liveness hazards such as deadlocks. In this chapter, we apply the tools presented in Chapter 6 to several classic synchronization problems. We also explore the synchronization mechanisms used by the Linux, UNIX, and Windows operating systems, and we describe API details for both Java and POSIX systems.
CHAPTER OBJECTIVES
- Explain the bounded-buffer, readers–writers, and dining–philosophers synchronization problems.
- Describe specific tools used by Linux and Windows to solve process synchronization problems.
- Illustrate how POSIX and Java can be used to solve process synchroniza- tion problems.
- Design and develop solutions to process synchronization problems using POSIX and Java APIs.
7.1 Classic Problems of Synchronization
In this section, we present a number of synchronization problems as examples of a large class of concurrency-control problems. These problems are used for testing nearly every newly proposed synchronization scheme. In our solutions to the problems, we use semaphores for synchronization, since that is the traditional way to present such solutions. However, actual implementations of these solutions could use mutex locks in place of binary semaphores.
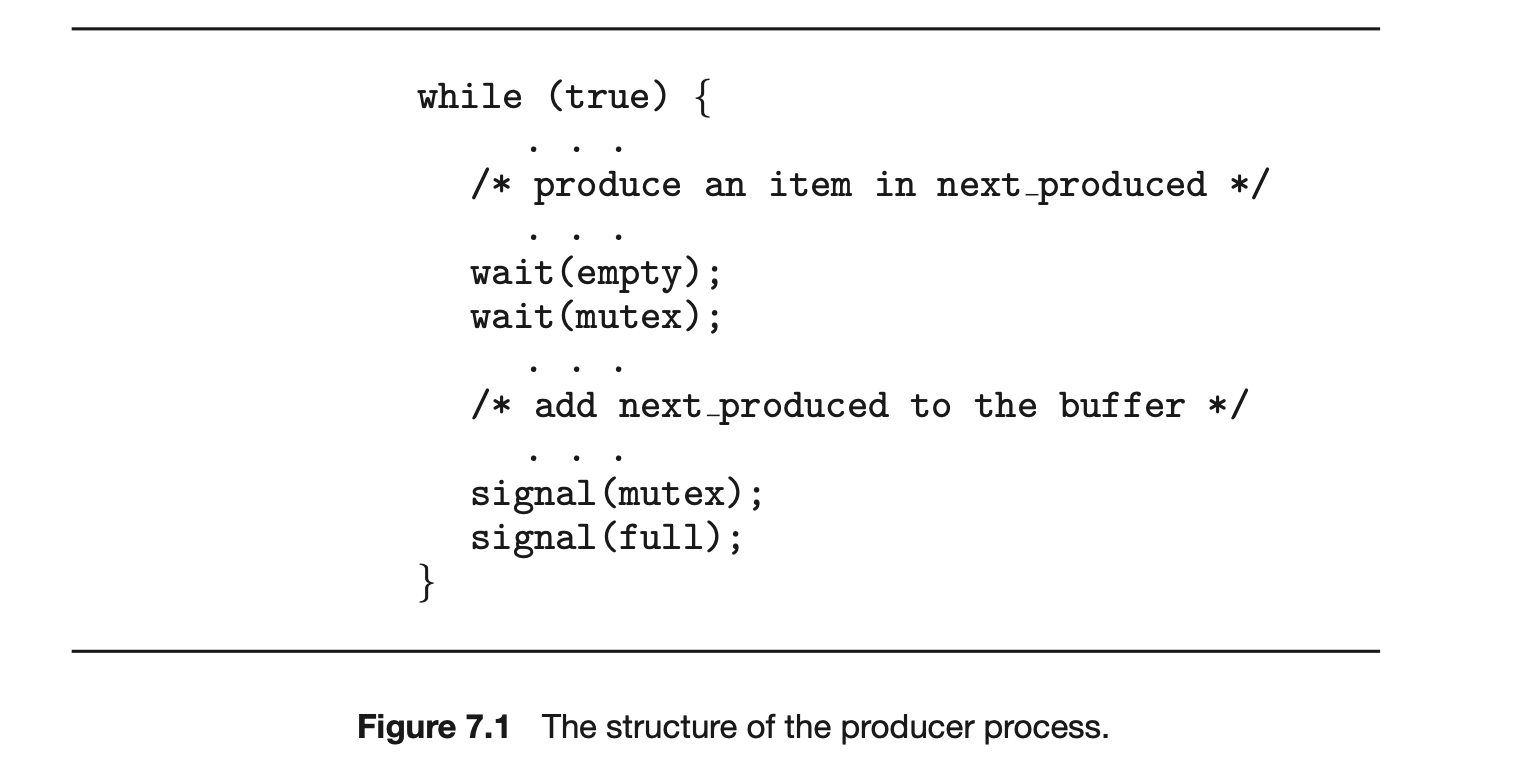
7.1.1 The Bounded-Buffer Problem
The bounded-buffer problem was introduced in Section 6.1; it is commonly used to illustrate the power of synchronization primitives. Here, we present a general structure of this scheme without committing ourselves to any particular implementation. We provide a related programming project in the exercises at the end of the chapter.
In our problem, the producer and consumer processes share the following data structures:

We assume that the pool consists of n buffers, each capable of holding one item. The mutex binary semaphore provides mutual exclusion for accesses to the buffer pool and is initialized to the value 1. The empty and full semaphores count the number of empty and full buffers. The semaphore empty is initialized to the value n; the semaphore full is initialized to the value 0.
The code for the producer process is shown in Figure 7.1, and the code for the consumer process is shown in Figure 7.2. Note the symmetry between the producer and the consumer. We can interpret this code as the producer producing full buffers for the consumer or as the consumer producing empty buffers for the producer.
7.1.2 The Readers-Writers Problem
Suppose that a database is to be shared among several concurrent processes. Some of these processes may want only to read the database, whereas others may want to update (that is, read and write) the database. We distinguish
 between these two types of processes by referring to the former as readers and to the latter as writers. Obviously, if two readers access the shared data simultaneously, no adverse effects will result. However, if a writer and some other process (either a reader or a writer) access the database simultaneously, chaos may ensue.
between these two types of processes by referring to the former as readers and to the latter as writers. Obviously, if two readers access the shared data simultaneously, no adverse effects will result. However, if a writer and some other process (either a reader or a writer) access the database simultaneously, chaos may ensue.
To ensure that these difficulties do not arise, we require that the writers have exclusive access to the shared database while writing to the database. This synchronization problem is referred to as the readers-writers problem. Since it was originally stated, it has been used to test nearly every new synchronization primitive.
The readers-writers problem has several variations, all involving priorities. The simplest one, referred to as the first readers-writers problem, requires that no reader be kept waiting unless a writer has already obtained permission to use the shared object. In other words, no reader should wait for other readers to finish simply because a writer is waiting. The second readers-writers problem requires that, once a writer is ready, that writer perform its write as soon as possible. In other words, if a writer is waiting to access the object, no new readers may start reading.
A solution to either problem may result in starvation. In the first case, writers may starve; in the second case, readers may starve. For this reason, other variants of the problem have been proposed. Next, we present a solution to the first readers-writers problem. See the bibliographical notes at the end of the chapter for references describing starvation-free solutions to the second readers-writers problem.
In the solution to the first readers-writers problem, the reader processes share the following data structures:

The binary semaphores mutex and rw_mutex are initialized to 1; read_count is a counting semaphore initialized to 0. The semaphorerw_mutex is common to both reader and writer processes. The mutex semaphore is used to ensure mutual exclusion when the variable read_count is updated. The read_count variable keeps track of how many processes are currently reading the object. The semaphore rw_mutex functions as a mutual exclusion semaphore for the writers. It is also used by the first or last reader that enters or exits the critical section. It is not used by readers that enter or exit while other readers are in their critical sections.
The code for a writer process is shown in Figure 7.3; the code for a reader process is shown in Figure 7.4. Note that, if a writer is in the critical section and readers are waiting, then one reader is queued on rw_mutex, and readers are queued on mutex. Also observe that, when a writer executes signal(rw_mutex), we may resume the execution of either the waiting readers or a single waiting writer. The selection is made by the scheduler.
The readers-writers problem and its solutions have been generalized to provide reader-writer locks on some systems. Acquiring a reader-writer lock requires specifying the mode of the lock: either read or write access. When a process wishes only to read shared data, it requests the reader-writer lock in read mode. A process wishing to modify the shared data must request the lock in write mode. Multiple processes are permitted to concurrently acquire a reader-writer lock in read mode, but only one process may acquire the lock for writing, as exclusive access is required for writers.
Reader-writer locks are most useful in the following situations:
- In applications where it is easy to identify which processes only read shared data and which processes only write shared data.
- In applications that have more readers than writers. This is because reader-writer locks generally require more overhead to establish than semaphores or mutual-exclusion locks. The increased concurrency of allowing multiple readers compensates for the overhead involved in setting up the reader-writer lock.
7.1.3 The Dining-Philosophers Problem
Consider five philosophers who spend their lives thinking and eating. The philosophers share a circular table surrounded by five chairs, each belonging to one philosopher. In the center of the table is a bowl of rice, and the table is laid with five single chopsticks (Figure 7.5). When a philosopher thinks, she does not interact with her colleagues. From time to time, a philosopher gets hungry and tries to pick up the two chopsticks that are closest to her (the chopsticks that are between her and her left and right neighbors). A philosopher may pick up only one chopstick at a time. Obviously, she cannot pick up a chopstick that is already in the hand of a neighbor. When a hungry philosopher has both her chopsticks at the same time, she eats without releasing the chopsticks. When she is finished eating, she puts down both chopsticks and starts thinking again.
The dining-philosophers problem is considered a classic synchronization problem neither because of its practical importance nor because computer scientists dislike philosophers but because it is an example of a large class of concurrency-control problems. It is a simple representation of the need to allocate several resources among several processes in a deadlock-free and starvation-free manner.
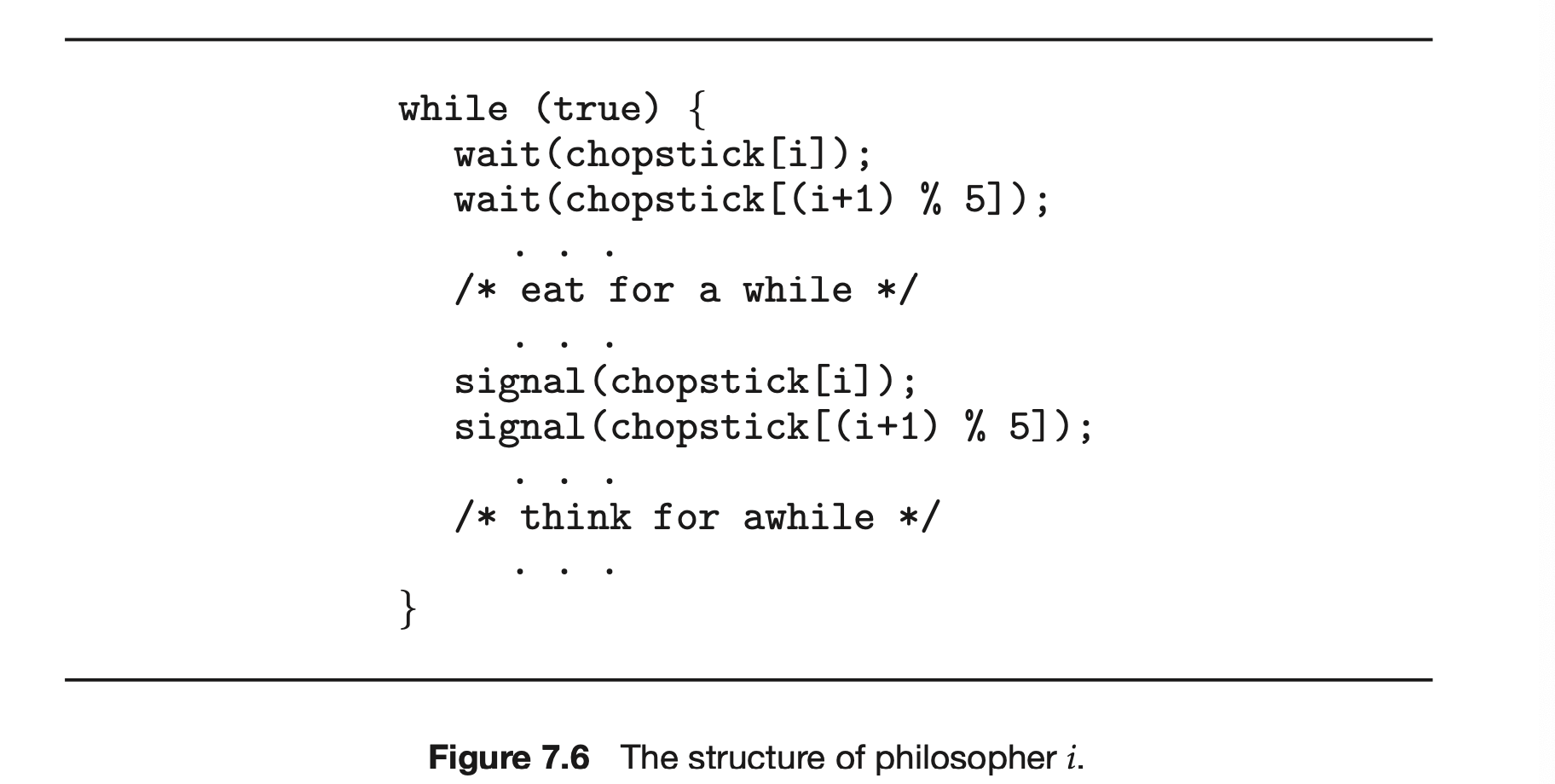
7.1.3.1 Semaphore Solution
One simple solution is to represent each chopstick with a semaphore. A philosopher tries to grab a chopstick by executing a wait() operation on that semaphore. She releases her chopsticks by executing the signal() operation on the appropriate semaphores. Thus, the shared data are
 where all the elements of chopstick are initialized to 1. The structure of philosopher is shown in Figure 7.6.
where all the elements of chopstick are initialized to 1. The structure of philosopher is shown in Figure 7.6.
Although this solution guarantees that no two neighbors are eating simultaneously, it nevertheless must be rejected because it could create a deadlock. Suppose that all five philosophers become hungry at the same time and each grabs her left chopstick. All the elements of chopstick will now be equal to 0. When each philosopher tries to grab her right chopstick, she will be delayed forever.
Several possible remedies to the deadlock problem are the following:
- Allow at most four philosophers to be sitting simultaneously at the table.
- Allow a philosopher to pick up her chopsticks only if both chopsticks are available (to do this, she must pick them up in a critical section).
- Use an asymmetric solution--that is, an odd-numbered philosopher picks up first her left chopstick and then her right chopstick, whereas an even-numbered philosopher picks up her right chopstick and then her left chopstick.
In Section 6.7, we present a solution to the dining-philosophers problem that ensures freedom from deadlocks. Note, however, that any satisfactory solution to the dining-philosophers problem must guard against the possibility that one of the philosophers will starve to death. A deadlock-free solution does not necessarily eliminate the possibility of starvation.
7.1.3.2 Monitor Solution
Next, we illustrate monitor concepts by presenting a deadlock-free solution to the dining-philosophers problem. This solution imposes the restriction that a philosopher may pick up her chopsticks only if both of them are available. To code this solution, we need to distinguish among three states in which we may find a philosopher. For this purpose, we introduce the following data structure:

Philosopher can set the variable state[i] = EATING only if her two neighbors are not eating: (state[(i+4) % 5]!= EATING) and (state[(i+1) % 5]!= EATING).
We also need to declare
 This allows philosopher to delay herself when she is hungry but is unable to obtain the chopsticks she needs.
This allows philosopher to delay herself when she is hungry but is unable to obtain the chopsticks she needs.
We are now in a position to describe our solution to the dining-philosophers problem. The distribution of the chopsticks is controlled by the monitor DiningPhilosophers, whose definition is shown in Figure 7. Each philosopher, before starting to eat, must invoke the operation pickup(). This act may result in the suspension of the philosopher process. After the successful completion of the operation, the philosopher may eat. Following this, the philosopher invokes the putdown() operation. Thus, philosopher must invoke the operations pickup() and putdown() in the following sequence:
 It is easy to show that this solution ensures that no two neighbors are eating simultaneously and that no deadlocks will occur. As we already noted, however, it is possible for a philosopher to starve to death. We do not present a solution to this problem but rather leave it as an exercise for you.
It is easy to show that this solution ensures that no two neighbors are eating simultaneously and that no deadlocks will occur. As we already noted, however, it is possible for a philosopher to starve to death. We do not present a solution to this problem but rather leave it as an exercise for you.
7.2 Synchronization within the Kernel
We next describe the synchronization mechanisms provided by the Windows and Linux operating systems. These two operating systems provide good examples of different approaches to synchronizing the kernel, and as you willsee, the synchronization mechanisms available in these systems differ in subtle yet significant ways.
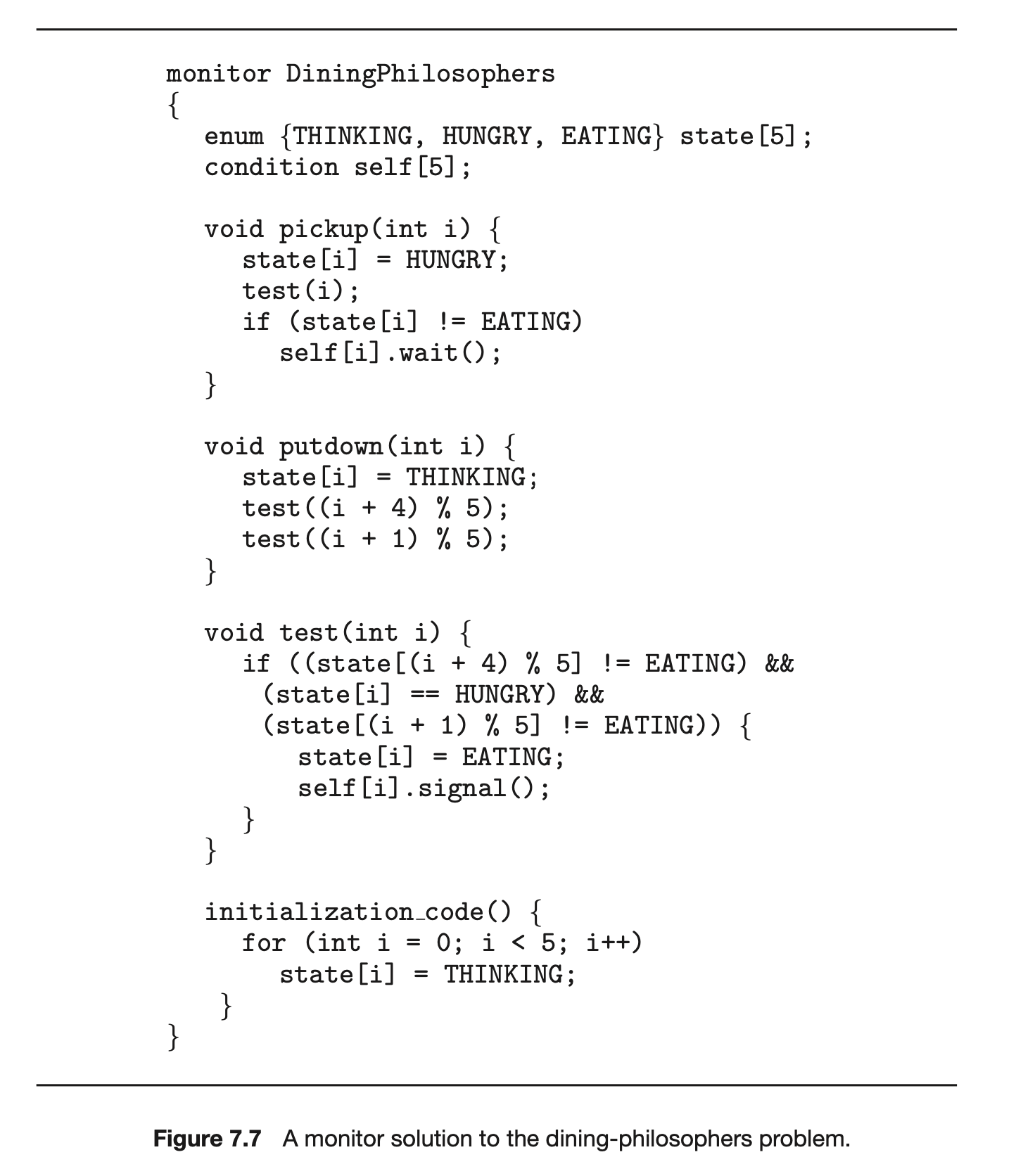
7.2.1 Synchronization in Windows
The Windows operating system is a multithreaded kernel that provides support for real-time applications and multiple processors. When the Windows kernel accesses a global resource on a single-processor system, it temporarily masks interrupts for all interrupt handlers that may also access the global resource. On a multiprocessor system, Windows protects access to global resources using spinlocks, although the kernel uses spinlocks only to protect short code segments. Furthermore, for reasons of efficiency, the kernel ensures that a thread will never be preempted while holding a spinlock.
For thread synchronization outside the kernel, Windows provides dispatcher objects. Using a dispatcher object, threads synchronize according to several different mechanisms, including mutex locks, semaphores, events, and timers. The system protects shared data by requiring a thread to gain ownership of a mutex to access the data and to release ownership when it is finished. Semaphores behave as described in Section 6.6. Events are similar to condition variables; that is, they may notify a waiting thread when a desired condition occurs. Finally, timers are used to notify one (or more than one) thread that a specified amount of time has expired.
Dispatcher objects may be in either a signaled state or a nonsignaled state. An object in a signaled state is available, and a thread will not block when acquiring the object. An object in a nonsignaled state is not available, and a thread will block when attempting to acquire the object. We illustrate the state transitions of a mutex lock dispatcher object in Figure 7.8.
A relationship exists between the state of a dispatcher object and the state of a thread. When a thread blocks on a nonsignaled dispatcher object, its state changes from ready to waiting, and the thread is placed in a waiting queue for that object. When the state for the dispatcher object moves to signaled, the kernel checks whether any threads are waiting on the object. If so, the kernel moves one thread--or possibly more--from the waiting state to the ready state, where they can resume executing. The number of threads the kernel selects from the waiting queue depends on the type of dispatcher object for which each thread is waiting. The kernel will select only one thread from the waiting queue for a mutex, since a mutex object may be "owned" by only a single thread. For an event object, the kernel will select all threads that are waiting for the event.
We can use a mutex lock as an illustration of dispatcher objects and thread states. If a thread tries to acquire a mutex dispatcher object that is in a nonsignaled state, that thread will be suspended and placed in a waiting queue for the mutex object. When the mutex moves to the signaled state (because another thread has released the lock on the mutex), the thread waiting at the front of the queue will be moved from the waiting state to the ready state and will acquire the mutex lock.
A critical-section object is a user-mode mutex that can often be acquired and released without kernel intervention. On a multiprocessor system, a critical-section object first uses a spinlock while waiting for the other thread to release the object. If it spins too long, the acquiring thread will then allocate a kernel mutex and yield its CPU. Critical-section objects are particularly efficient because the kernel mutex is allocated only when there is contention for the object. In practice, there is very little contention, so the savings are significant.
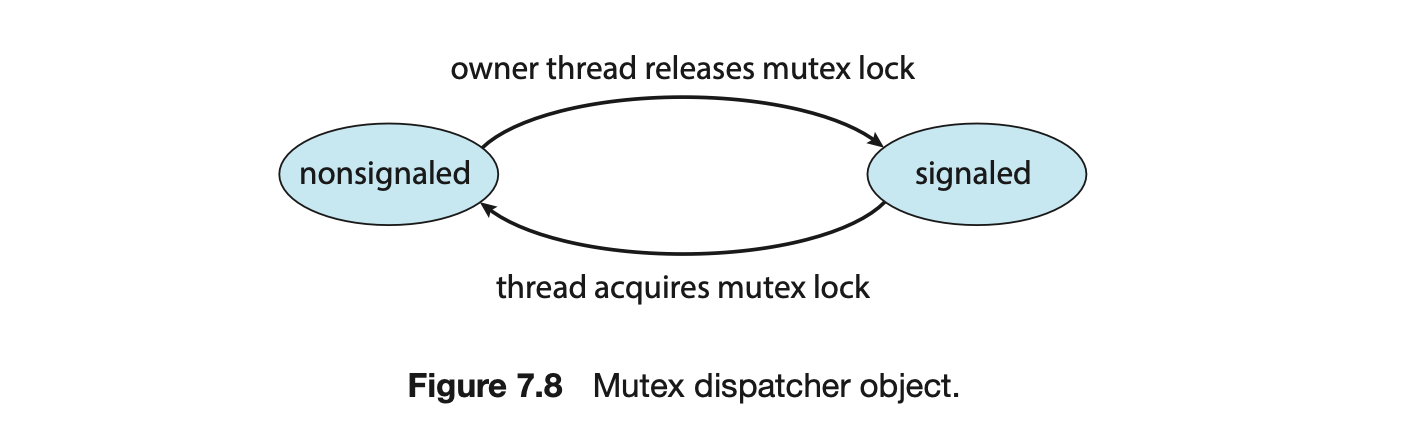
We provide a programming project at the end of this chapter that uses mutex locks and semaphores in the Windows API.
7.2.2 Synchronization in Linux
Prior to Version 2.6, Linux was a nonpreemptive kernel, meaning that a process running in kernel mode could not be preempted--even if a higher-priority process became available to run. Now, however, the Linux kernel is fully preemptive, so a task can be preempted when it is running in the kernel.
Linux provides several different mechanisms for synchronization in the kernel. As most computer architectures provide instructions for atomic versions of simple math operations, the simplest synchronization technique within the Linux kernel is an atomic integer, which is represented using the opaque data type atomic_t. As the name implies, all math operations using atomic integers are performed without interruption. To illustrate, consider a program that consists of an atomic integer counter and an integer value.

The following code illustrates the effect of performing various atomic operations:
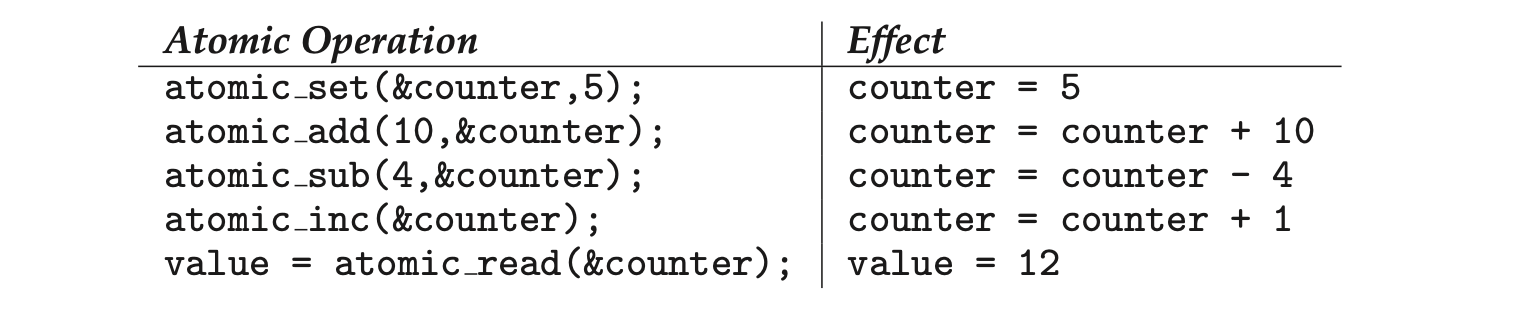 Atomic integers are particularly efficient in situations where an integer variable--such as a counter--needs to be updated, since atomic operations do not require the overhead of locking mechanisms. However, their use is limited to these sorts of scenarios. In situations where there are several variables contributing to a possible race condition, more sophisticated locking tools must be used.
Atomic integers are particularly efficient in situations where an integer variable--such as a counter--needs to be updated, since atomic operations do not require the overhead of locking mechanisms. However, their use is limited to these sorts of scenarios. In situations where there are several variables contributing to a possible race condition, more sophisticated locking tools must be used.
Mutex locks are available in Linux for protecting critical sections within the kernel. Here, a task must invoke the mutex_lock() function prior to entering a critical section and the mutex_unlock() function after exiting the critical section. If the mutex lock is unavailable, a task calling mutex_lock() is put into a sleep state and is awakened when the lock's owner invokes mutex_unlock().
Linux also provides spinlocks and semaphores (as well as reader-writer versions of these two locks) for locking in the kernel. On SMP machines, the fundamental locking mechanism is a spinlock, and the kernel is designed so that the spinlock is held only for short durations. On single-processor machines, such as embedded systems with only a single processing core, spinlocks are inappropriate for use and are replaced by enabling and disabling kernel preemption. That is, on systems with a single processing core, rather than holding a spinlock, the kernel disables kernel preemption; and rather than releasing the spinlock, it enables kernel preemption. This is summarized below:

In the Linux kernel, both spinlocks and mutex locks are nonrecursive, which means that if a thread has acquired one of these locks, it cannot acquire the same lock a second time without first releasing the lock. Otherwise, the second attempt at acquiring the lock will block.
Linux uses an interesting approach to disable and enable kernel preemption. It provides two simple system calls--preempt_disable() and preempt_enable() --for disabling and enabling kernel preemption. The kernel is not preemptible, however, if a task running in the kernel is holding a lock. To enforce this rule, each task in the system has a thread-info structure containing a counter, preempt_count, to indicate the number of locks being held by the task. When a lock is acquired, preempt_count is incremented. It is decremented when a lock is released. If the value of preempt_count for the task currently running in the kernel is greater than 0, it is not safe to preempt the kernel, as this task currently holds a lock. If the count is 0, the kernel can safely be interrupted (assuming there are no outstanding calls to preempt_disable()).
Spinlocks--along with enabling and disabling kernel preemption--are used in the kernel only when a lock (or disabling kernel preemption) is held for a short duration. When a lock must be held for a longer period, semaphores or mutex locks are appropriate for use.
7.3 POSIX Synchronization
The synchronization methods discussed in the preceding section pertain to synchronization within the kernel and are therefore available only to kernel developers. In contrast, the POSIX API is available for programmers at the user level and is not part of any particular operating-system kernel. (Of course, it must ultimately be implemented using tools provided by the host operating system.)
In this section, we cover mutex locks, semaphores, and condition variables that are available in the Pthreads and POSIX APIs. These APIs are widely used for thread creation and synchronization by developers on UNIX, Linux, and macOS systems.
7.3.1 POSIX Mutex locks
Mutex locks represent the fundamental synchronization technique used with Pthreads. A mutex lock is used to protect critical sections of code--that is, a thread acquires the lock before entering a critical section and releases it upon exiting the critical section. Pthreads uses the pthread_mutex_t data type for mutex locks. A mutex is created with the pthread_mutex_init() function. The first parameter is a pointer to the mutex. By passing NULL as a second parameter, we initialize the mutex to its default attributes. This is illustrated below:
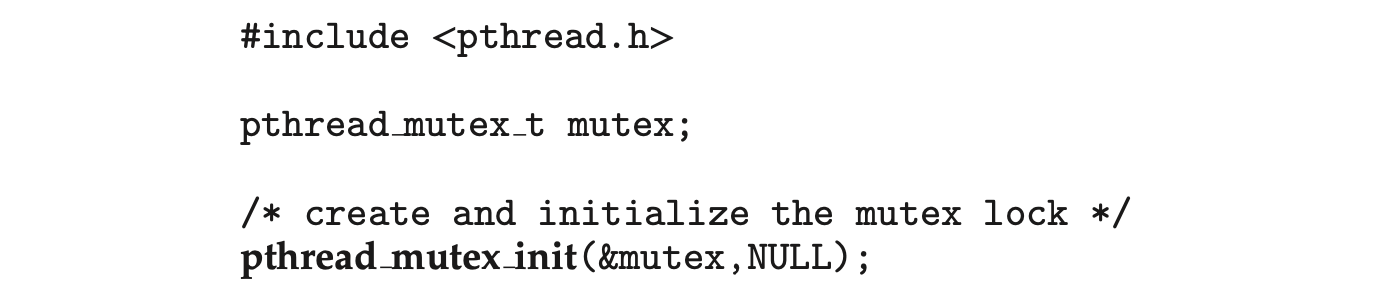
The mutex is acquired and released with the pthread_mutex_lock() and pthread_mutex_unlock() functions. If the mutex lock is unavailable when pthread_mutex_lock() is invoked, the calling thread is blocked until the owner invokes pthread_mutex_unlock(). The following code illustrates protecting a critical section with mutex locks:
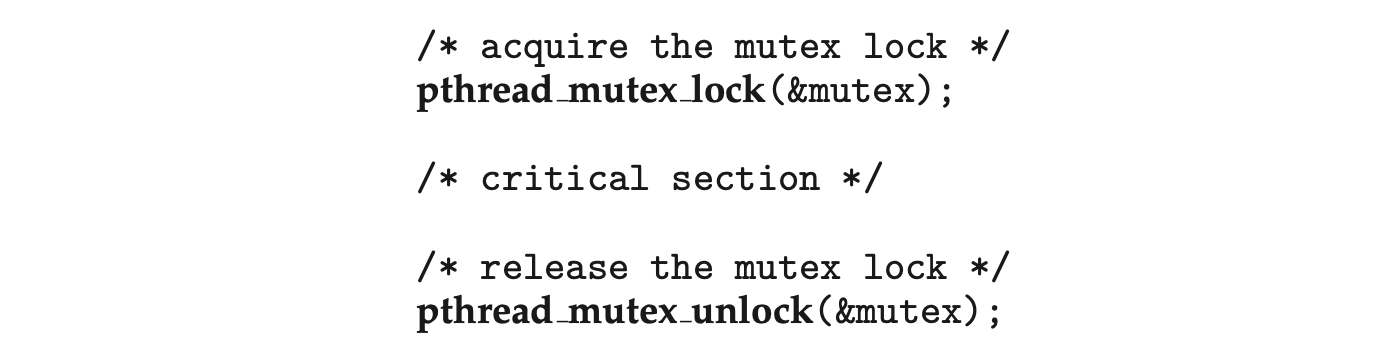 All mutex functions return a value of 0 with correct operation; if an error occurs, these functions return a nonzero error code.
All mutex functions return a value of 0 with correct operation; if an error occurs, these functions return a nonzero error code.
7.3.2 POSIX Semaphores
Many systems that implement Pthreads also provide semaphores, although semaphores are not part of the POSIX standard and instead belong to the POSIX SEM extension. POSIX specifies two types of semaphores--named and unnamed. Fundamentally, the two are quite similar, but they differ in terms of how they are created and shared between processes. Because both techniques are common, we discuss both here. Beginning with Version 2.6 of the kernel, Linux systems provide support for both named and unnamed semaphores.
7.3.2.1 POSIX Named Semaphores
The function sem_open() is used to create and open a POSIX named semaphore:

In this instance, we are naming the semaphore SEM. The O_CREAT flag indicates that the semaphore will be created if it does not already exist. Additionally, the semaphore has read and write access for other processes (via the parameter 0666) and is initialized to 1.
The advantage of named semaphores is that multiple unrelated processes can easily use a common semaphore as a synchronization mechanism by simply referring to the semaphore's name. In the example above, once the semaphore SEM has been created, subsequent calls to sem_open() (with the same parameters) by other processes return a descriptor to the existing semaphore.
In Section 6.6, we described the classic wait() and signal() semaphore operations. POSIX declares these operations sem_wait() and sem_post(), respectively. The following code sample illustrates protecting a critical section using the named semaphore created above:
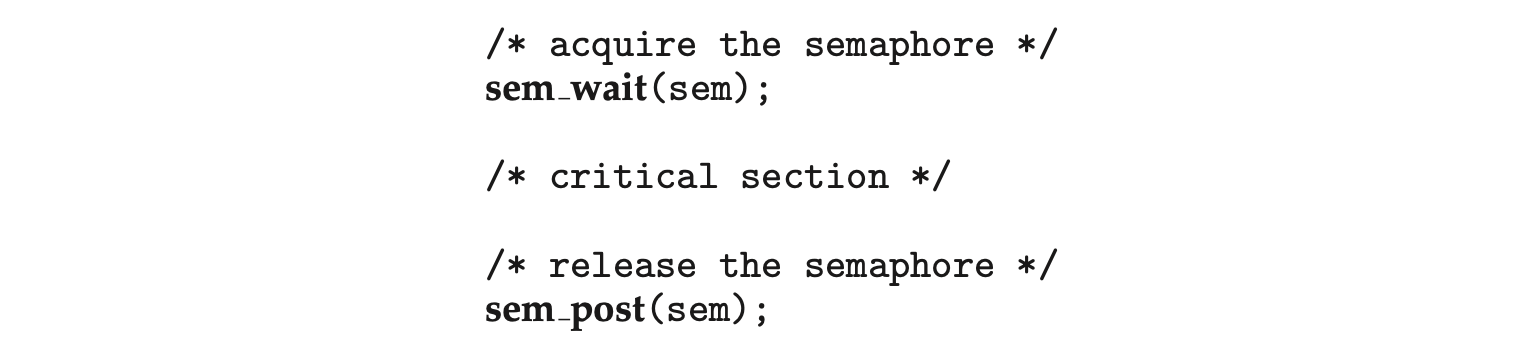
Both Linux and macOS systems provide POSIX named semaphores.
7.3.2.2 POSIX Unnamed Semaphores
An unnamed semaphore is created and initialized using the sem_init() function, which is passed three parameters:
- A pointer to the semaphore
- A flag indicating the level of sharing
- The semaphore's initial value
and is illustrated in the following programming example:
 In this example, by passing the flag 0, we are indicating that this semaphore can be shared only by threads belonging to the process that created the semaphore. (If we supplied a nonzero value, we could allow the semaphore to be shared between separate processes by placing it in a region of shared memory.) In addition, we initialize the semaphore to the value 1.
In this example, by passing the flag 0, we are indicating that this semaphore can be shared only by threads belonging to the process that created the semaphore. (If we supplied a nonzero value, we could allow the semaphore to be shared between separate processes by placing it in a region of shared memory.) In addition, we initialize the semaphore to the value 1.
POSIX unnamed semaphores use the same sem_wait() and sem_post() operations as named semaphores. The following code sample illustrates protecting a critical section using the unnamed semaphore created above:
 Just like mutex locks, all semaphore functions return 0 when successful and nonzero when an error condition occurs.
Just like mutex locks, all semaphore functions return 0 when successful and nonzero when an error condition occurs.
7.3.3 POSIX Condition Variables
Condition variables in Pthreads behave similarly to those described in Section 6.7. However, in that section, condition variables are used within the context of a monitor, which provides a locking mechanism to ensure data integrity. Since Pthreads is typically used in C programs--and since C does not have a monitor-- we accomplish locking by associating a condition variable with a mutex lock.
Condition variables in Pthreads use the pthread_cond_t data type and are initialized using the pthread_cond_init() function. The following code creates and initializes a condition variable as well as its associated mutex lock:

The pthread_cond_wait() function is used for waiting on a condition variable. The following code illustrates how a thread can wait for the condition a == b to become true using a Pthread condition variable:

The mutex lock associated with the condition variable must be locked before the pthread_cond_wait() function is called, since it is used to protect the data in the conditional clause from a possible race condition. Once this lock is acquired, the thread can check the condition. If the condition is not true, the thread then invokes pthread_cond_wait(), passing the mutex lock and the condition variable as parameters. Calling pthread_cond_wait() releases the mutex lock, thereby allowing another thread to access the shared data and possibly update its value so that the condition clause evaluates to true. (To protect against program errors, it is important to place the conditional clause within a loop so that the condition is rechecked after being signaled.)
A thread that modifies the shared data can invoke the pthread_cond_signal() function, thereby signaling one thread waiting on the condition variable. This is illustrated below:
 It is important to note that the call to
It is important to note that the call to pthread_cond_signal() does not release the mutex lock. It is the subsequent call to pthread_mutex_unlock() that releases the mutex. Once the mutex lock is released, the signaled thread becomes the owner of the mutex lock and returns control from the call to pthread_cond_wait().
We provide several programming problems and projects at the end of this chapter that use Pthreads mutex locks and condition variables, as well as POSIX semaphores.
7.4 Synchronization in Java
The Java language and its API have provided rich support for thread synchronization since the origins of the language. In this section, we first cover Java monitors, Java's original synchronization mechanism. We then cover three additional mechanisms that were introduced in Release 1.5: reentrant locks, semaphores, and condition variables. We include these because they represent the most common locking and synchronization mechanisms. However, the Java API provides many features that we do not cover in this text--for example, support for atomic variables and the CAS instruction--and we encourage interested readers to consult the bibliography for more information.
7.4.1 Java Monitors
Java provides a monitor-like concurrency mechanism for thread synchronization. We illustrate this mechanism with the BoundedBuffer class (Figure 7.9), which implements a solution to the bounded-buffer problem wherein the producer and consumer invoke the insert() and remove() methods, respectively.
Every object in Java has associated with it a single lock. When a method is declared to be synchronized, calling the method requires owning the lock for the object. We declare a synchronized method by placing the synchronized keyword in the method definition, such as with the insert() and remove() methods in the BoundedBuffer class.
Invoking a synchronized method requires owning the lock on an object instance of BoundedBuffer. If the lock is already owned by another thread, the thread calling the synchronized method blocks and is placed in the entry set for the object's lock. The entry set represents the set of threads waiting for the lock to become available. If the lock is available when a synchronized method is called, the calling thread becomes the owner of the object's lock and can enter the method. The lock is released when the thread exits the method. If the entry set for the lock is not empty when the lock is released, the JVMarbitrarily selects a thread from this set to be the owner of the lock. (When we say "arbitrarily," we mean that the specification does not require that threads in this set be organized in any particular order. However, in practice, most virtual machines order threads in the entry set according to a FIFO policy.) Figure 7.10 illustrates how the entry set operates.
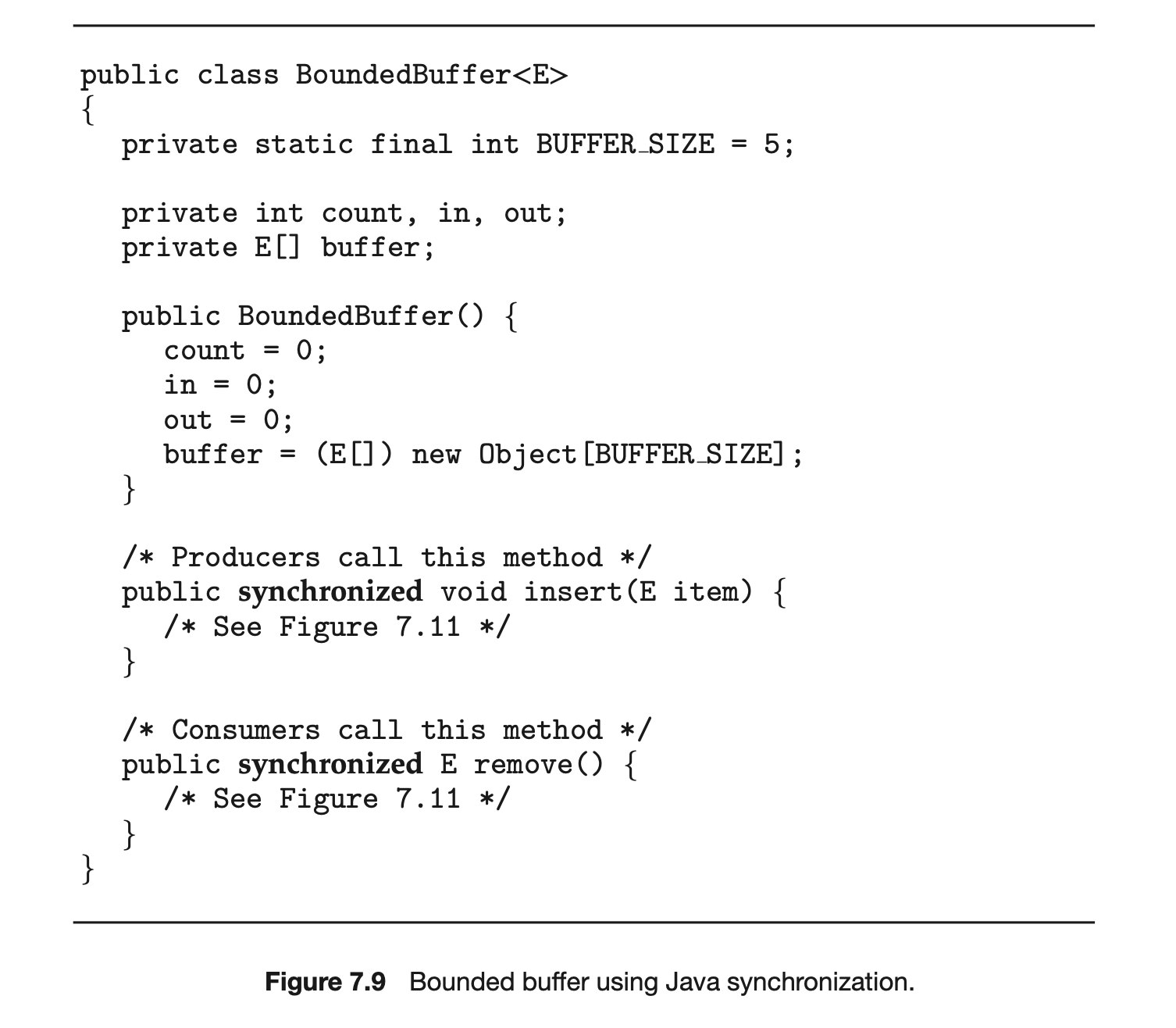
In addition to having a lock, every object also has associated with it a wait set consisting of a set of threads. This wait set is initially empty. When a thread enters a synchronized method, it owns the lock for the object. However, this thread may determine that it is unable to continue because a certain condition has not been met. That will happen, for example, if the producer calls the insert() method and the buffer is full. The thread then will release the lock and wait until the condition that will allow it to continue is met.
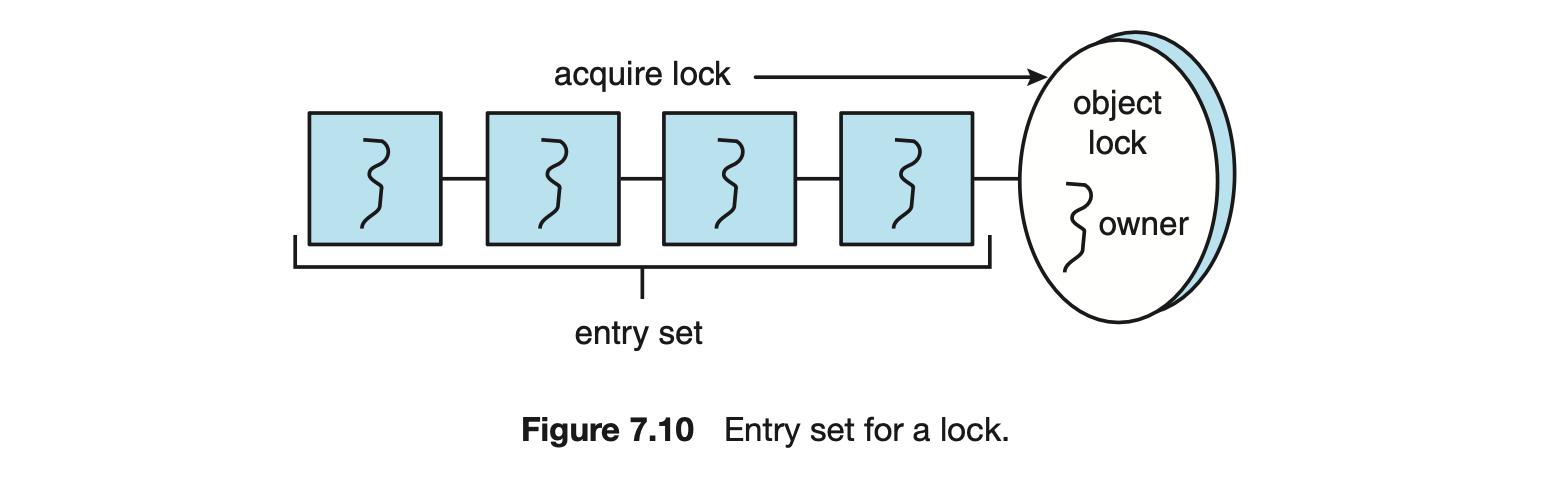
BLOCK SYNCHRONIZATION
The amount of time between when a lock is acquired and when it is released is defined as the scope of the lock. A synchronized method that has only a small percentage of its code manipulating shared data may yield a scope that is too large. In such an instance, it may be better to synchronize only the block of code that manipulates shared data than to synchronize the entire method. Such a design results in a smaller lock scope. Thus, in addition to declaring synchronized methods, Java also allows block synchronization, as illustrated below. Only the access to the critical-section code requires ownership of the object lock for the this object.
public void someMethod() {
/* non-critical section */
synchronized(this) {
/* critical section */
}
/* remainder section */
}
When a thread calls the wait() method, the following happens:
- The thread releases the lock for the object.
- The state of the thread is set to blocked.
- The thread is placed in the wait set for the object.
Consider the example in Figure 7.11. If the producer calls the insert() method and sees that the buffer is full, it calls the wait() method. This call releases the lock, blocks the producer, and puts the producer in the wait set for the object. Because the producer has released the lock, the consumer ultimately enters the remove() method, where it frees space in the buffer for the producer. Figure 7.12 illustrates the entry and wait sets for a lock. (Note that although wait() can throw an InterruptedException, we choose to ignore it for code clarity and simplicity.)
How does the consumer thread signal that the producer may now proceed? Ordinarily, when a thread exits a synchronized method, the departing thread releases only the lock associated with the object, possibly removing a thread from the entry set and giving it ownership of the lock. However, at the end of the insert() and remove() methods, we have a call to the method notify(). The call to notify():
-
Picks an arbitrary thread T from the list of threads in the wait set
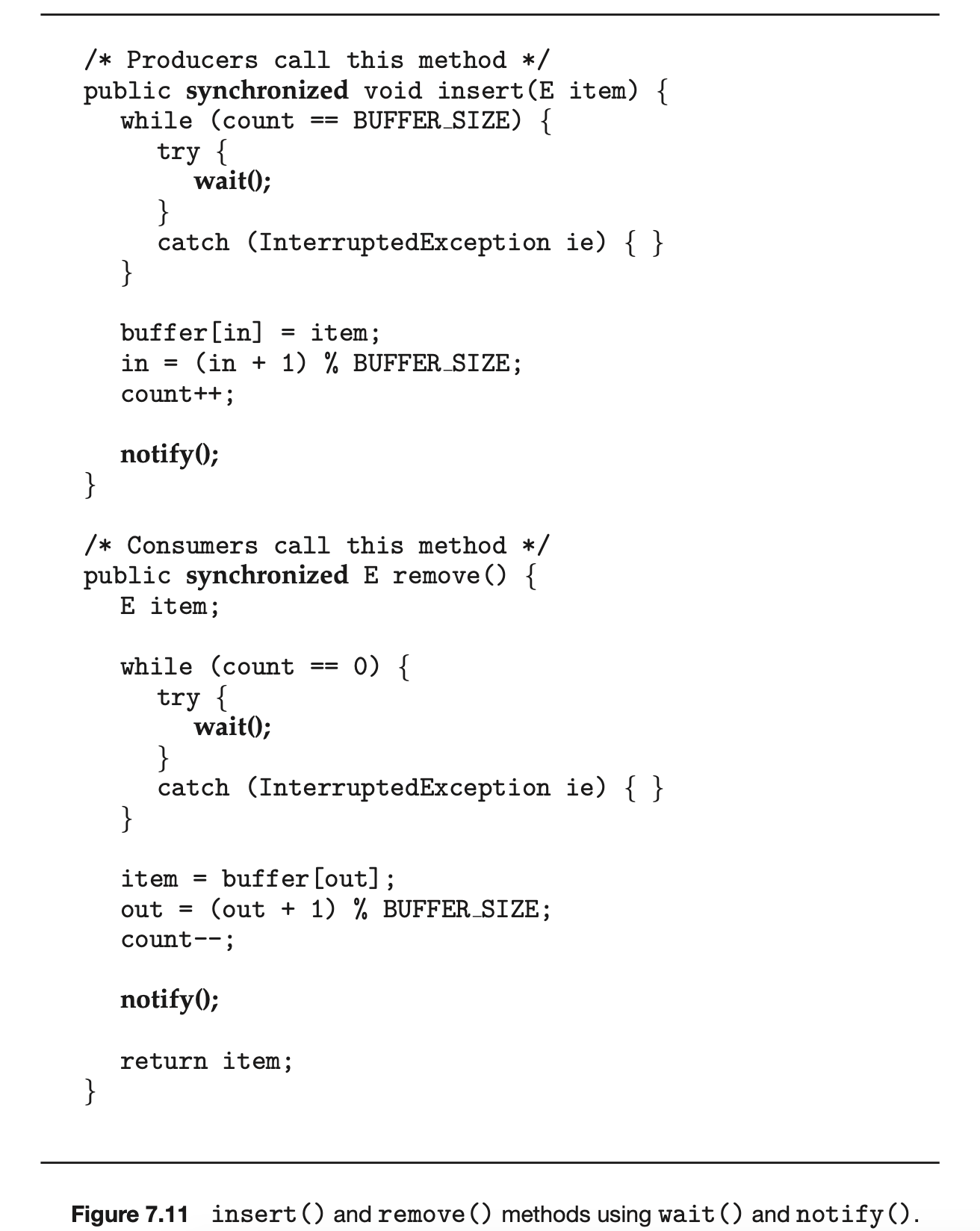
-
Moves T from the wait set to the entry set
-
Sets the state of T from blocked to runnable
T is now eligible to compete for the lock with the other threads. Once T has regained control of the lock, it returns from calling wait(), where it may check the value of count again. (Again, the selection of an arbitrary thread is according to the Java specification; in practice, most Java virtual machines order threads in the wait set according to a FIFO policy.)
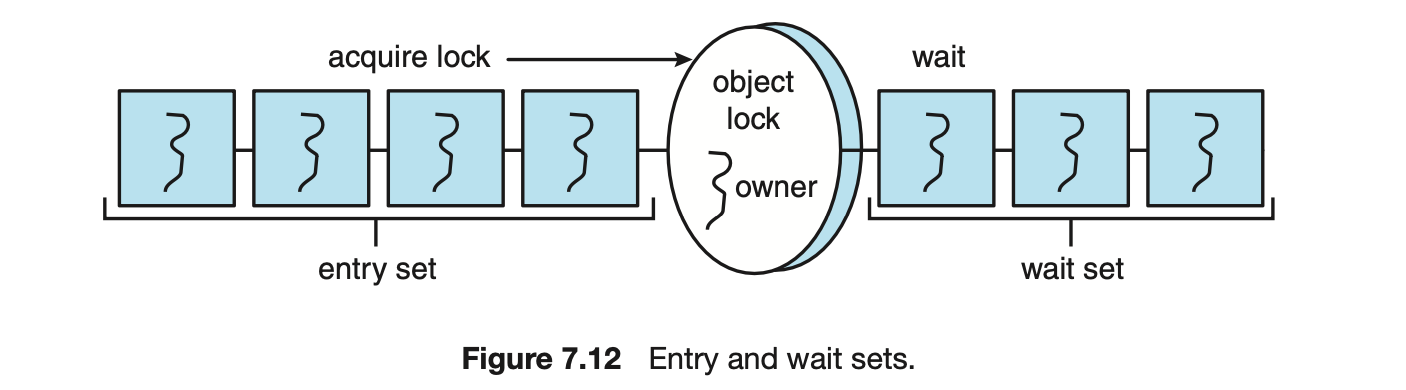
Next, we describe the wait() and notify() methods in terms of the methods shown in Figure 7.11. We assume that the buffer is full and the lock for the object is available.
- The producer calls the insert() method, sees that the lock is available, and enters the method. Once in the method, the producer determines that the buffer is full and calls wait(). The call to wait() releases the lock for the object, sets the state of the producer to blocked, and puts the producer in the wait set for the object.
- The consumer ultimately calls and enters the remove() method, as the lock for the object is now available. The consumer removes an item from the buffer and calls notify(). Note that the consumer still owns the lock for the object.
- The call to notify() removes the producer from the wait set for the object, moves the producer to the entry set, and sets the producer's state to runnable.
- The consumer exits the remove() method. Exiting this method releases the lock for the object.
- The producer tries to reacquire the lock and is successful. It resumes execution from the call to wait(). The producer tests the while loop, determines that room is available in the buffer, and proceeds with the remainder of the insert() method. If no thread is in the wait set for the object, the call to notify() is ignored. When the producer exits the method, it releases the lock for the object.
The synchronized, wait(), and notify() mechanisms have been part of Java since its origins. However, later revisions of the Java API introduced much more flexible and robust locking mechanisms, some of which we examine in the following sections.
7.4.2 Reentrant Locks
Perhaps the simplest locking mechanism available in the API is the Reentrant-Lock. In many ways, a ReentrantLock acts like the synchronized statement described in Section 7.4.1: a ReentrantLock is owned by a single thread and is used to provide mutually exclusive access to a shared resource. However, the ReentrantLock provides several additional features, such as setting a fairness parameter, which favors granting the lock to the longest-waiting thread. (Recall that the specification for the JVM does not indicate that threads in the wait set for an object lock are to be ordered in any specific fashion.)
A thread acquires a ReentrantLock lock by invoking its lock() method. If the lock is available--or if the thread invoking lock() already owns it, which is why it is termed reentrant--lock() assigns the invoking thread lock ownership and returns control. If the lock is unavailable, the invoking thread blocks until it is ultimately assigned the lock when its owner invokes unlock().ReentrantLock implements the Lock interface; it is used as follows:
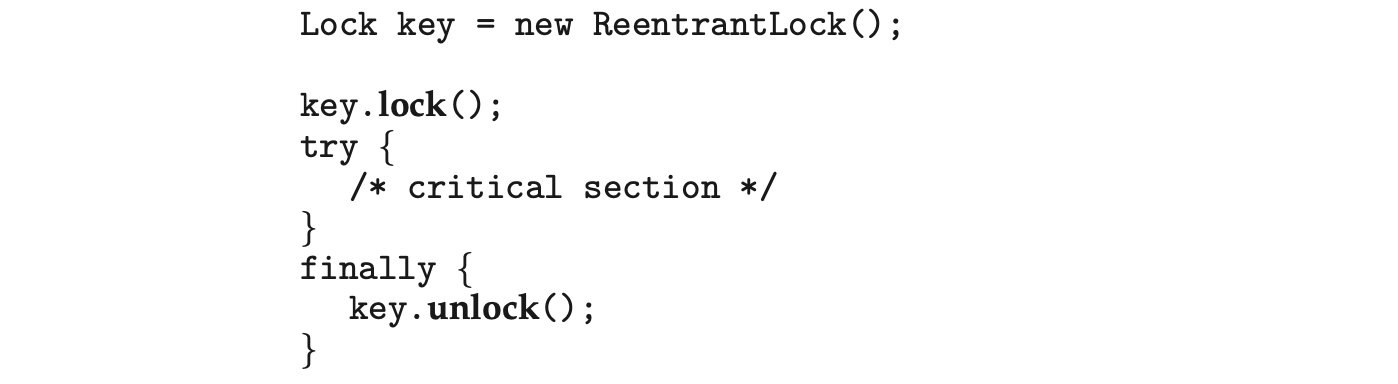
The programming idiom of using try and finally requires a bit of explanation. If the lock is acquired via the lock() method, it is important that the lock be similarly released. By enclosing unlock() in a finally clause, we ensure that the lock is released once the critical section completes or if an exception occurs within the try block. Notice that we do not place the call to lock() within the try clause, as lock() does not throw any checked exceptions. Consider what happens if we place lock() within the try clause and an unchecked exception occurs when lock() is invoked (such as OutOfMemoryError): The finally clause triggers the call to unlock(), which then throws the unchecked IllegalMonitorStateException, as the lock was never acquired. This IllegalMonitorStateException replaces the unchecked exception that occurred when lock() was invoked, thereby obscuring the reason why the program initially failed.
Whereas a ReentrantLock provides mutual exclusion, it may be too conservative a strategy if multiple threads only read, but do not write, shared data. (We described this scenario in Section 7.1.2.) To address this need, the Java API also provides a ReentrantReadWriteLock, which is a lock that allows multiple concurrent readers but only one writer.
7.4.3 Semaphores
The Java API also provides a counting semaphore, as described in Section 6.6. The constructor for the semaphore appears as
 where value specifies the initial value of the semaphore (a negative value is allowed). The acquire() method throws an InterruptedException if the acquiring thread is interrupted. The following example illustrates using a semaphore for mutual exclusion:
where value specifies the initial value of the semaphore (a negative value is allowed). The acquire() method throws an InterruptedException if the acquiring thread is interrupted. The following example illustrates using a semaphore for mutual exclusion:
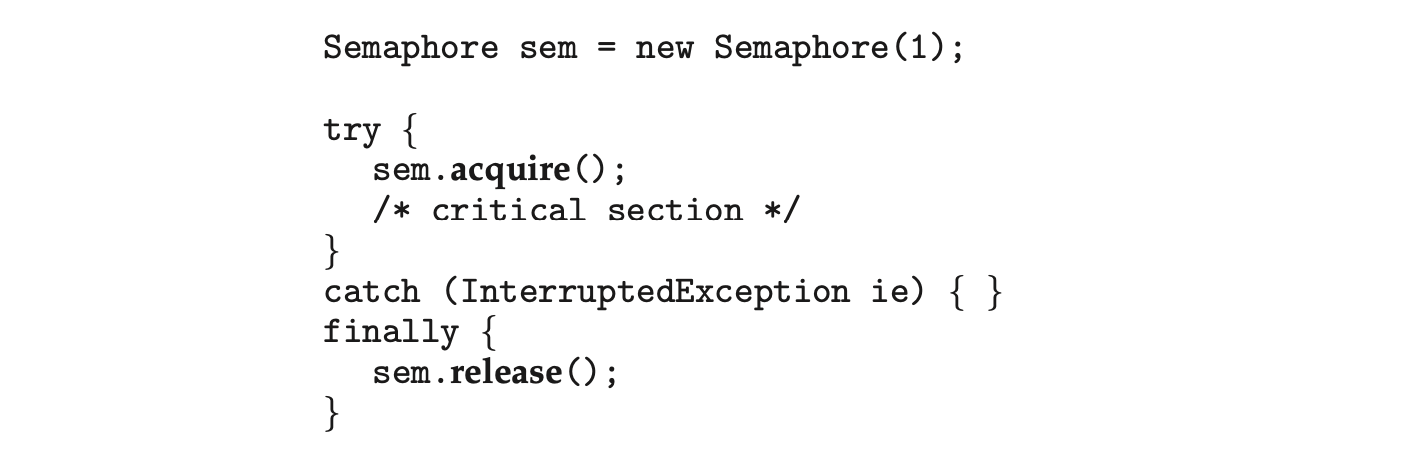 Notice that we place the call to release() in the finally clause to ensure that the semaphore is released.
Notice that we place the call to release() in the finally clause to ensure that the semaphore is released.
7.4.4 Condition Variables
The last utility we cover in the Java API is the condition variable. Just as the ReentrantLock is similar to Java's synchronized statement, condition variables provide functionality similar to the wait() and notify() methods. Therefore, to provide mutual exclusion, a condition variable must be associated with a reentrant lock.
We create a condition variable by first creating a ReentrantLock and invoking its newCondition() method, which returns a Condition object representing the condition variable for the associated ReentrantLock. This is illustrated in the following statements:
 Once the condition variable has been obtained, we can invoke its await() and signal() methods, which function in the same way as the wait() and signal() commands described in Section 6.7.
Once the condition variable has been obtained, we can invoke its await() and signal() methods, which function in the same way as the wait() and signal() commands described in Section 6.7.
Recall that with monitors as described in Section 6.7, the wait() and signal() operations can be applied to named condition variables, allowing a thread to wait for a specific condition or to be notified when a specific condition has been met. At the language level, Java does not provide support for named condition variables. Each Java monitor is associated with just one unnamed condition variable, and the wait() and notify() operations described in Section 7.4.1 apply only to this single condition variable. When a Java thread is awakened via notify(), it receives no information as to why it was awakened; it is up to the reactivated thread to check for itself whether the condition for which it was waiting has been met. Condition variables remedy this by allowing a specific thread to be notified.
We illustrate with the following example: Suppose we have five threads, numbered 0 through 4, and a shared variable turn indicating which thread's turn it is. When a thread wishes to do work, it calls the doWork() method in Figure 7.13, passing its thread number. Only the thread whose value of threadNumber matches the value of turn can proceed; other threads must wait their turn.
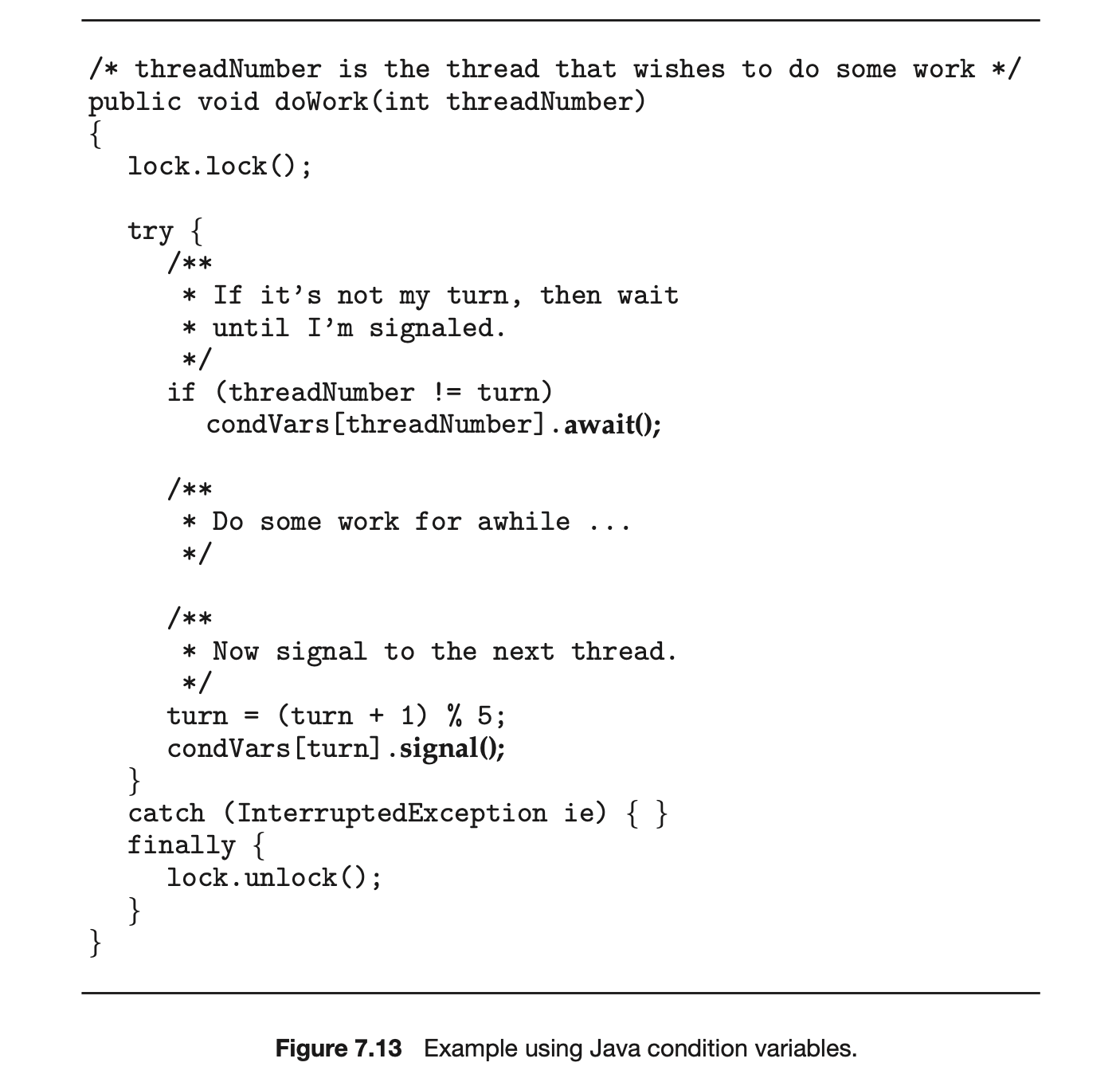 We also must create a ReentrantLock and five condition variables (representing the conditions the threads are waiting for) to signal the thread whose turn is next. This is shown below:
We also must create a ReentrantLock and five condition variables (representing the conditions the threads are waiting for) to signal the thread whose turn is next. This is shown below:
 When a thread enters doWork(), it invokes the await() method on its associated condition variable if its threadNumber is not equal to turn, only to resume when it is signaled by another thread. After a thread has completed its work, it signals the condition variable associated with the thread whose turn follows.
When a thread enters doWork(), it invokes the await() method on its associated condition variable if its threadNumber is not equal to turn, only to resume when it is signaled by another thread. After a thread has completed its work, it signals the condition variable associated with the thread whose turn follows.
It is important to note that doWork() does not need to be declared synchronized, as the ReentrantLock provides mutual exclusion. When a thread invookes await() on the condition variable, it releases the associated , allowing another thread to acquire the mutual exclusion lock. Similarly, when is invoked, only the condition variable is signaled; the lock is released by invoking .
7.5 Alternative Approaches
With the emergence of multicore systems has come increased pressure to develop concurrent applications that take advantage of multiple processing cores. However, concurrent applications present an increased risk of race conditions and liveness hazards such as deadlock. Traditionally, techniques such as mutex locks, semaphores, and monitors have been used to address these issues, but as the number of processing cores increases, it becomes increasingly difficult to design multithreaded applications that are free from race conditions and deadlock. In this section, we explore various features provided in both programming languages and hardware that support the design of thread-safe concurrent applications.
7.5.1 Transactional Memory
Quite often in computer science, ideas from one area of study can be used to solve problems in other areas. The concept of originated in database theory, for example, yet it provides a strategy for process synchronization. is a sequence of memory operations that are atomic. If all operations in a transaction are completed, the memory transaction is committed. Otherwise, the operations must be aborted and rolled back. The benefits of transactional memory can be obtained through features added to a programming language.
Consider an example. Suppose we have a function that modifies shared data. Traditionally, this function would be written using mutex locks (or semaphores) such as the following:
However, using synchronization mechanisms such as mutex locks and semaphores involves many potential problems, including deadlock. Additionally, as the number of threads increases, traditional locking doesn't scale as well, because the level of contention among threads for lock ownership becomes very high.
As an alternative to traditional locking methods, new features that take advantage of transactional memory can be added to a programming language. In our example, suppose we add the construct , which ensures that the operations in S execute as a transaction. This allows us to rewrite the update() function as follows:
 The advantage of using such a mechanism rather than locks is that the transactional memory system--not the developer--is responsible for guaranteeing atomicity. Additionally, because no locks are involved, deadlock is not possible. Furthermore, a transactional memory system can identify which statements in atomic blocks can be executed concurrently, such as concurrent read access to a shared variable. It is, of course, possible for a programmer to identify these situations and use reader-writer locks, but the task becomes increasingly difficult as the number of threads within an application grows.
The advantage of using such a mechanism rather than locks is that the transactional memory system--not the developer--is responsible for guaranteeing atomicity. Additionally, because no locks are involved, deadlock is not possible. Furthermore, a transactional memory system can identify which statements in atomic blocks can be executed concurrently, such as concurrent read access to a shared variable. It is, of course, possible for a programmer to identify these situations and use reader-writer locks, but the task becomes increasingly difficult as the number of threads within an application grows.
Transactional memory can be implemented in either software or hardware.Software transactional memory (STM), as the name suggests, implements transactional memory exclusively in software--no special hardware is needed. STM works by inserting instrumentation code inside transaction blocks. The code is inserted by a compiler and manages each transaction by examining where statements may run concurrently and where specific low-level locking is required. Hardware transactional memory (HTM) uses hardware cache hierarchies and cache coherency protocols to manage and resolve conflicts involving shared data residing in separate processors' caches. HTM requires no special code instrumentation and thus has less overhead than STM. However, HTM does require that existing cache hierarchies and cache coherency protocols be modified to support transactional memory.
Transactional memory has existed for several years without widespread implementation. However, the growth of multicore systems and the associated emphasis on concurrent and parallel programming have prompted a significant amount of research in this area on the part of both academics and commercial software and hardware vendors.
7.5.2 OpenMP
In Section 4.5.2, we provided an overview of OpenMP and its support of parallel programming in a shared-memory environment. Recall that OpenMP includes a set of compiler directives and an API. Any code following the compiler directive omp parallel is identified as a parallel region and is performed by a number of threads equal to the number of processing cores in the system. The advantage of OpenMP (and similar tools) is that thread creation and management are handled by the OpenMP library and are not the responsibility of application developers.
Along with its omp parallel compiler directive, OpenMP provides the compiler directive omp critical, which specifies the code region following the directive as a critical section in which only one thread may be active at a time. In this way, OpenMP provides support for ensuring that threads do not generate race conditions.
As an example of the use of the critical-section compiler directive, first assume that the shared variable counter can be modified in the update() function as follows:

If the update() function can be part of --or invoked from--a parallel region, a race condition is possible on the variable counter.
The critical-section compiler directive can be used to remedy this race condition and is coded as follows:
 The critical-section compiler directive behaves much like a binary semaphore or mutex lock, ensuring that only one thread at a time is active in the critical section. If a thread attempts to enter a critical section when another thread is currently active in that section (that is, owns the section), the calling thread is blocked until the owner thread exits. If multiple critical sections must be used, each critical section can be assigned a separate name, and a rule can specify that no more than one thread may be active in a critical section of the same name simultaneously.
The critical-section compiler directive behaves much like a binary semaphore or mutex lock, ensuring that only one thread at a time is active in the critical section. If a thread attempts to enter a critical section when another thread is currently active in that section (that is, owns the section), the calling thread is blocked until the owner thread exits. If multiple critical sections must be used, each critical section can be assigned a separate name, and a rule can specify that no more than one thread may be active in a critical section of the same name simultaneously.
An advantage of using the critical-section compiler directive in OpenMP is that it is generally considered easier to use than standard mutex locks. However, a disadvantage is that application developers must still identify possible race conditions and adequately protect shared data using the compiler directive. Additionally, because the critical-section compiler directive behaves much like a mutex lock, deadlock is still possible when two or more critical sections are identified.
7.5.3 Functional Programming Languages
Most well-known programming languages--such as C, C++, Java, and C#--are known as imperative (or procedural) languages. Imperative languages are used for implementing algorithms that are state-based. In these languages, the flow of the algorithm is crucial to its correct operation, and state is represented with variables and other data structures. Of course, program state is mutable, as variables may be assigned different values over time.
With the current emphasis on concurrent and parallel programming for multicore systems, there has been greater focus on functional programming languages, which follow a programming paradigm much different from that offered by imperative languages. The fundamental difference between imperative and functional languages is that functional languages do not maintain state. That is, once a variable has been defined and assigned a value, its valueis immutable--it cannot change. Because functional languages disallow mutable state, they need not be concerned with issues such as race conditions and deadlocks. Essentially, most of the problems addressed in this chapter are nonexistent in functional languages.
Several functional languages are presently in use, and we briefly mention two of them here: Erlang and Scala. The Erlang language has gained significant attention because of its support for concurrency and the ease with which it can be used to develop applications that run on parallel systems. Scala is a functional language that is also object-oriented. In fact, much of the syntax of Scala is similar to the popular object-oriented languages Java and C#. Readers interested in Erlang and Scala, and in further details about functional languages in general, are encouraged to consult the bibliography at the end of this chapter for additional references.
7.6 Summary
- Classic problems of process synchronization include the bounded-buffer, readerswriters, and dining-philosophers problems. Solutions to these problems can be developed using the tools presented in Chapter 6, including mutex locks, semaphores, monitors, and condition variables.
- Windows uses dispatcher objects as well as events to implement process synchronization tools.
- Linux uses a variety of approaches to protect against race conditions, including atomic variables, spinlocks, and mutex locks.
- The POSIX API provides mutex locks, semaphores, and condition variables. POSIX provides two forms of semaphores: named and unnamed. Several unrelated processes can easily access the same named semaphore by simply referring to its name. Unnamed semaphores cannot be shared as easily, and require placing the semaphore in a region of shared memory.
- Java has a rich library and API for synchronization. Available tools include monitors (which are provided at the language level) as well as reentrant locks, semaphores, and condition variables (which are supported by the API).
- Alternative approaches to solving the critical-section problem include transactional memory, OpenMP, and functional languages. Functional languages are particularly intriguing, as they offer a different programming paradigm from procedural languages. Unlike procedural languages, functional languages do not maintain state and therefore are generally immune from race conditions and critical sections.
Practice Exercises
7.1 Explain why Windows and Linux implement multiple locking mechanisms. Describe the circumstances under which they use spinlocks, mutex locks, semaphores, and condition variables. In each case, explain why the mechanism is needed.
7.2 Windows provides a lightweight synchronization tool called slim reader -writer locks. Whereas most implementations of reader-writer locks favor either readers or writers, or perhaps order waiting threads using a FIFO policy, slim reader-writer locks favor neither readers nor writers, nor are waiting threads ordered in a FIFO queue. Explain the benefits of providing such a synchronization tool.
Describe what changes would be necessary to the producer and consumer processes in Figure 7.1 and Figure 7.2 so that a mutex lock could be used instead of a binary semaphore.
Describe how deadlock is possible with the dining-philosophers problem.
Explain the difference between signaled and non-signaled states with Windows dispatcher objects.
Assume val is an atomic integer in a Linux system. What is the value of val after the following operations have been completed?
Further Reading
Details of Windows synchronization can be found in [Solomon and Russinovich (2000)]. [Love (2010)] describes synchronization in the Linux kernel. [Hart (2005)] describes thread synchronization using Windows. [Breshears (2009)] and [Pacheco (2011)] provide detailed coverage of synchronization issues in relation to parallel programming. Details on using OpenMP can be found at http://openmp.org. Both [Oaks (2014)] and [Goetz et al. (2006)] contrast traditional synchronization and CAS-based strategies in Java.
Bibliography
-
[Breshears (2009)] C. Breshears, The Art of Concurrency, O'Reilly & Associates (2009).
-
[Goetz et al. (2006)] B. Goetz, T. Peirls, J. Bloch, J. Bowbeer, D. Holmes, and D. Lea, Java Concurrency in Practice, Addison-Wesley (2006).
-
[Hart (2005)] J. M. Hart, Windows System Programming, Third Edition, Addison-Wesley (2005).
-
[Love (2010)] R. Love, Linux Kernel Development, Third Edition, Developer's Library (2010).
-
[Oaks (2014)] S. Oaks, Java Performance--The Definitive Guide, O'Reilly Associates (2014).
-
[Pacheco (2011)] P. S. Pacheco, An Introduction to Parallel Programming, Morgan Kaufmann (2011).
-
[Solomon and Russinovich (2000)] D. A. Solomon and M. E. Russinovich, Inside Microsoft Windows 2000, Third Edition, Microsoft Press (2000).
Chapter 7 Exercises
- 7.7 Describe two kernel data structures in which race conditions are possible. Be sure to include a description of how a race condition can occur.
- 7.8 The Linux kernel has a policy that a process cannot hold a spinlock while attempting to acquire a semaphore. Explain why this policy is in place.
- 7.9 Design an algorithm for a bounded-buffer monitor in which the buffers (portions) are embedded within the monitor itself.
- 7.10 The strict mutual exclusion within a monitor makes the bounded-buffer monitor of Exercise 7.14 mainly suitable for small portions.
-
- Explain why this is true.
-
- Design a new scheme that is suitable for larger portions.
- 7.11 Discuss the tradeoff between fairness and throughput of operations in the readerswriters problem. Propose a method for solving the readerswriters problem without causing starvation.
- 7.12 Explain why the call to the lock() method in a Java ReentrantLock is not placed in the try clause for exception handling, yet the call to the unlock() method is placed in a finally clause.
- 7.13 Explain the difference between software and hardware transactional memory.
Programming Problems
7.14 Exercise 3.20 required you to design a PID manager that allocated a unique process identifier to each process. Exercise 4.28 required you to modify your solution to Exercise 3.20 by writing a program that created a number of threads that requested and released process identifiers. Using mutex locks, modify your solution to Exercise 4.28 by ensuring that the data structure used to represent the availability of process identifiers is safe from race conditions.
7.15 In Exercise 4.27, you wrote a program to generate the Fibonacci sequence. The program required the parent thread to wait for the child thread to finish its execution before printing out the computed values. If we let the parent thread access the Fibonacci numbers as soon as they were computed by the child thread --rather than waiting for the child thread to terminate--what changes would be necessary to the solution for this exercise? Implement your modified solution.
7.16 The C program stack-ptr.c (available in the source-code download) contains an implementation of a stack using a linked list. An example of its use is as follows:
This program currently has a race condition and is not appropriate for a concurrent environment. Using Pthreads mutex locks (described in Section 7.3.1), fix the race condition.
7.17 Exercise 4.24 asked you to design a multithreaded program that estimated using the Monte Carlo technique. In that exercise, you were asked to create a single thread that generated random points, storing the result in a global variable. Once that thread exited, the parent thread performed the calculation that estimated the value of . Modify that program so that you create several threads, each of which generates random points and determines if the points fall within the circle. Each thread will have to update the global count of all points that fall within the circle. Protect against race conditions on updates to the shared global variable by using mutex locks.
7.18 Exercise 4.25 asked you to design a program using OpenMP that estimated using the Monte Carlo technique. Examine your solution to that program looking for any possible race conditions. If you identify a race condition, protect against it using the strategy outlined in Section 7.5.2.
- A barrier is a tool for synchronizing the activity of a number of threads. When a thread reaches a barrier point, it cannot proceed until all otherthreads have reached this point as well. When the last thread reaches the barrier point, all threads are released and can resume concurrent execution.
Assume that the barrier is initialized to --the number of threads that must wait at the barrier point:
 Each thread then performs some work until it reaches the barrier point:
Each thread then performs some work until it reaches the barrier point:
 Using either the POSIX or Java synchronization tools described in this chapter, construct a barrier that implements the following API:
Using either the POSIX or Java synchronization tools described in this chapter, construct a barrier that implements the following API:
- int init(int n)--Initializes the barrier to the specified size.
- int barrier_point(void)--Identififies the barrier point. All threads are released from the barrier when the last thread reaches this point.
The return value of each function is used to identify error conditions. Each function will return 0 under normal operation and will return if an error occurs. A testing harness is provided in the source-code download to test your implementation of the barrier.
Programming Projects
Project 1--Designing a Thread Pool
Thread pools were introduced in Section 4.5.1. When thread pools are used, a task is submitted to the pool and executed by a thread from the pool. Work is submitted to the pool using a queue, and an available thread removes work from the queue. If there are no available threads, the work remains queued until one becomes available. If there is no work, threads await notification until a task becomes available.
This project involves creating and managing a thread pool, and it may be completed using either Pthreads and POSIX synchronization or Java. Below we provide the details relevant to each specific technology.
I. Posix
The POSIX version of this project will involve creating a number of threads using the Pthreads API as well as using POSIX mutex locks and semaphores for synchronization.
The Client
Users of the thread pool will utilize the following API:
- void pool_init() -- Initializes the thread pool.
- int pool_submit(void (somefunction)(voidp), void *p) -- where somefunction is a pointer to the function that will be executed by a thread from the pool and p is a parameter passed to the function.
- void pool_shutdown(void) --Shuts down the thread pool once all tasks have completed.
We provide an example program client.c in the source code download that illustrates how to use the thread pool using these functions.
Implementation of the Thread Pool
In the source code download we provide the C source file threadpool.c as a partial implementation of the thread pool. You will need to implement the functions that are called by client users, as well as several additional functions that support the internals of the thread pool. Implementation will involve the following activities:
- The pool_init() function will create the threads at startup as well as initialize mutual-exclusion locks and semaphores.
- The pool_submit() function is partially implemented and currently places the function to be executed--as well as its data-- into a task struct. The task struct represents work that will be completed by a thread in the pool. pool_submit() will add these tasks to the queue by invoking the enqueue() function, and worker threads will call dequeue() to retrieve work from the queue. The queue may be implemented statically (using arrays) or dynamically (using a linked list).
The pool_init() function has an int return value that is used to indicate if the task was successfully submitted to the pool (0 indicates success, 1 indicates failure). If the queue is implemented using arrays, pool_init() will return 1 if there is an attempt to submit work and the queue is full. If the queue is implemented as a linked list, pool_init() should always return 0 unless a memory allocation error occurs. 3. The worker() function is executed by each thread in the pool, where each thread will wait for available work. Once work becomes available, the thread will remove it from the queue and invoke execute() to run the specified function.
A semaphore can be used for notifying a waiting thread when work is submitted to the thread pool. Either named or unnamed semaphores may be used. Refer to Section 7.3.2 for further details on using POSIX semaphores.
-
A mutex lock is necessary to avoid race conditions when accessing or modifying the queue. (Section 7.3.1 provides details on Pthreads mutex locks.)
-
The pool_shutdown() function will cancel each worker thread and then wait for each thread to terminate by calling pthread_join(). Refer to Section 4.6.3 for details on POSIX thread cancellation. (The semaphore operation sem_wait() is a cancellation point that allows a thread waiting on a semaphore to be cancelled.)
Refer to the source-code download for additional details on this project. In particular, the README file describes the source and header files, as well as the Makefile for building the project.
II Java
The Java version of this project may be completed using Java synchronization tools as described in Section 7.4. Synchronization may depend on either (a) monitors using synchronized/wait()/notify() (Section 7.4.1) or (b) semaphores and reentrant locks (Section 7.4.2 and Section 7.4.3). Java threads are described in Section 4.4.3.
Implementation of the Thread Pool
Your thread pool will implement the following API:
- ThreadPool() --Create a default-sized thread pool.
- ThreadPool(int size) --Create a thread pool of size size.
- void add(Runnable task) --Add a task to be performed by a thread in the pool.
- void shutdown() --Stop all threads in the pool.
We provide the Java source file ThreadPool.java as a partial implementation of the thread pool in the source code download. You will need to implement the methods that are called by client users, as well as several additional methods that support the internals of the thread pool. Implementation will involve the following activities:
- The constructor will first create a number of idle threads that await work.
- Work will be submitted to the pool via the add() method, which adds a task implementing the Runnable interface. The add() method will place the Runnable task into a queue (you may use an available structure from the Java API such as java.util.List).
- Once a thread in the pool becomes available for work, it will check the queue for any Runnable tasks. If there is such a task, the idle thread will remove the task from the queue and invoke its run() method. If the queue is empty, the idle thread will wait to be notified when work becomes available. (The add() method may implement notification using either notify() or semaphore operations when it places a Runnable task into the queue to possibly awaken an idle thread awaiting work.)
- The shutdown() method will stop all threads in the pool by invoking their interrupt() method. This, of course, requires that Runnable tasks being executed by the thread pool check their interruption status (Section 4.6.3).
Refer to the source-code download for additional details on this project. In particular, the README file describes the Java source files, as well as further details on Java thread interruption.
Project 2--The Sleeping Teaching Assistant
A university computer science department has a teaching assistant (TA) who helps undergraduate students with their programming assignments during regular office hours. The TA's office is rather small and has room for only one desk with a chair and computer. There are three chairs in the hallway outside the office where students can sit and wait if the TA is currently helping another student. When there are no students who need help during office hours, the TA sits at the desk and takes a nap. If a student arrives during office hours and finds the TA sleeping, the student must awaken the TA to ask for help. If a student arrives and finds the TA currently helping another student, the student sits on one of the chairs in the hallway and waits. If no chairs are available, the student will come back at a later time.
Using POSIX threads, mutex locks, and semaphores, implement a solution that coordinates the activities of the TA and the students. Details for this assignment are provided below.
The Students and the TA
Using Pthreads (Section 4.4.1), begin by creating students where each student will run as a separate thread. The TA will run as a separate thread as well. Student threads will alternate between programming for a period of time and seeking help from the TA. If the TA is available, they will obtain help. Otherwise, they will either sit in a chair in the hallway or, if no chairs are available, will resume programming and will seek help at a later time. If a student arrives and notices that the TA is sleeping, the student must notify the TA using a semaphore. When the TA finishes helping a student, the TA must check to see if there are students waiting for help in the hallway. If so, the TA must help each of these students in turn. If no students are present, the TA may return to mapping.
Perhaps the best option for simulating students programming--as well as the TA providing help to a student--is to have the appropriate threads sleep for a random period of time.
Coverage of POSIX mutex locks and semaphores is provided in Section 7.3. Consult that section for details.
Project 3--The Dining-Philosophers Problem
In Section 7.1.3, we provide an outline of a solution to the dining-philosophers problem using monitors. This project involves implementing a solution to this problem using either POSIX mutex locks and condition variables or Java condition variables. Solutions will be based on the algorithm illustrated in Figure 7.7.
Both implementations will require creating five philosophers, each identified by a number . Each philosopher will run as a separate thread. Philosophers alternate between thinking and eating. To simulate both activities, have each thread sleep for a random period between one and three seconds.
I. Posix
Thread creation using Pthreads is covered in Section 4.4.1. When a philosopher wishes to eat, she invokes the function
pickup_forks(int philosopher_number)
where philosopher_number identifies the number of the philosopher wishing to eat. When a philosopher finishes eating, she invokes
return_forks(int philosopher_number)
Your implementation will require the use of POSIX condition variables, which are covered in Section 7.3.
II. Java
When a philosopher wishes to eat, she invokes the method takeForks(philosopherNumber), where philosopherNumber identifies the number of the philosopher wishing to eat. When a philosopher finishes eating, she invokes returnForks(philosopherNumber).
Your solution will implement the following interface:
 It will require the use of Java condition variables, which are covered in Section 7.4.4.
It will require the use of Java condition variables, which are covered in Section 7.4.4.
Project 4 -- The Producer-Consumer Problem
In Section 7.1.1, we presented a semaphore-based solution to the producer-consumer problem using a bounded buffer. In this project, you will design a programming solution to the bounded-buffer problem using the producer and consumer processes shown in Figures 5.9 and 5.10. The solution presented in Section 7.1.1 uses three semaphores: empty and full, which count the number of empty and full slots in the buffer, and mutex, which is a binary (or mutual-exclusion) semaphore that protects the actual insertion or removal of items in the buffer. For this project, you will use standard counting semaphores for empty and full and a mutex lock, rather than a binary semaphore, to represent mutex. The producer and consumer--running as separate threads --will move items to and from a buffer that is synchronized with the empty, full, and mutex structures. You can solve this problem using either Pthreads or the Windows API.
The Buffer
Internally, the buffer will consist of a fixed-size array of type buffer_item (which will be defined using a typedef). The array of buffer_item objects will be manipulated as a circular queue. The definition of buffer_item, along with the size of the buffer, can be stored in a header file such as the following:
 The buffer will be manipulated with two functions, insert_item() and remove_item(), which are called by the producer and consumer threads, respectively. A skeleton outlining these functions appears in Figure 7.14.
The buffer will be manipulated with two functions, insert_item() and remove_item(), which are called by the producer and consumer threads, respectively. A skeleton outlining these functions appears in Figure 7.14.
The insert_item() and remove_item() functions will synchronize the producer and consumer using the algorithms outlined in Figure 7.1 and Figure 7.2. The buffer will also require an initialization function that initializes the mutual-exclusion object mutex along with the empty and full semaphores.
The main() function will initialize the buffer and create the separate producer and consumer threads. Once it has created the producer and consumer threads, the main() function will sleep for a period of time and, upon awakening, will terminate the application. The main() function will be passed three parameters on the command line:
- How long to sleep before terminating
- The number of producer threads
- The number of consumer threads
A skeleton for this function appears in Figure 7.15.
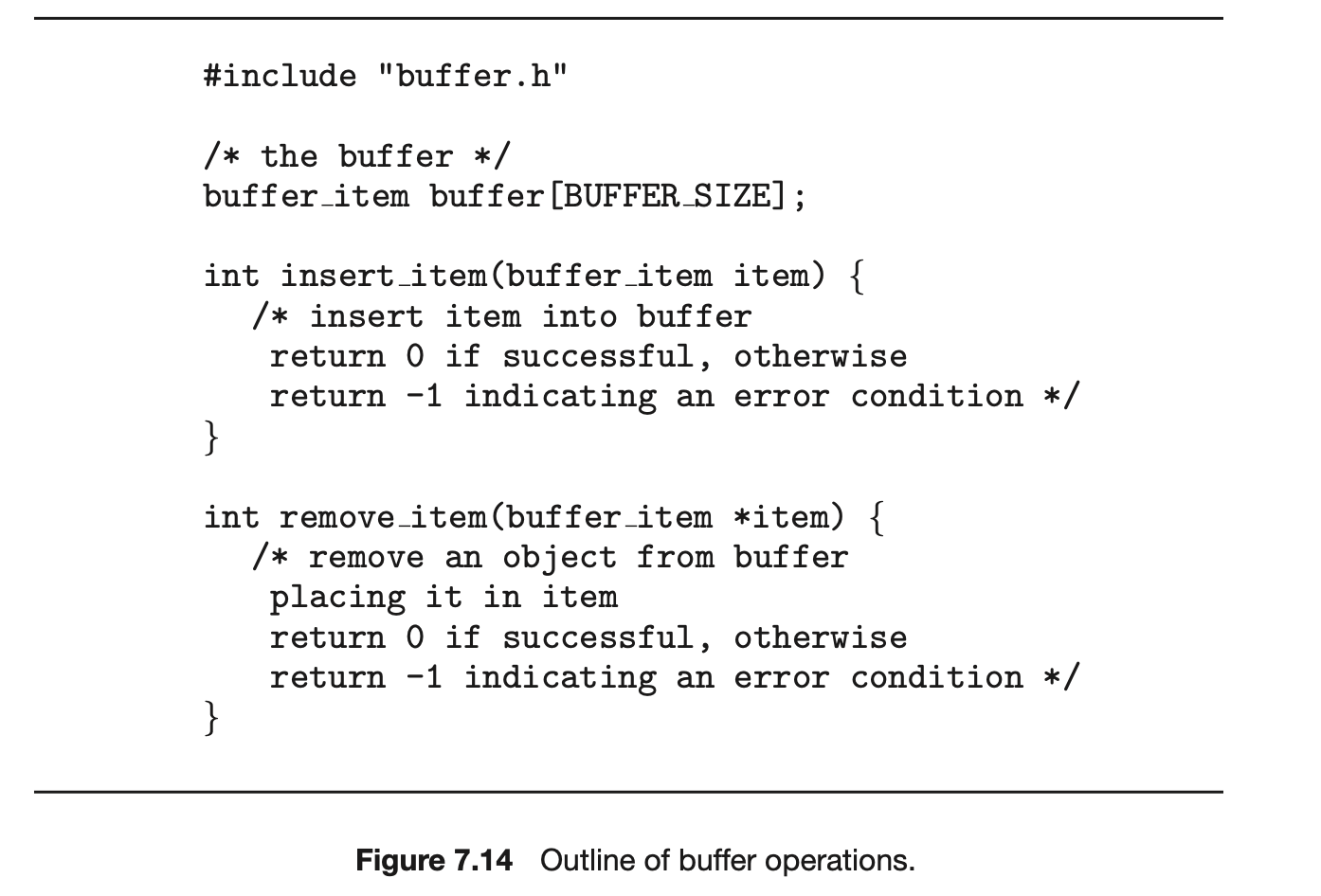
The Producer and Consumer Threads
The producer thread will alternate between sleeping for a random period of time and inserting a random integer into the buffer. Random numbers will be produced using the rand() function, which produces random integers between 0 and RAND_MAX. The consumer will also sleep for a random period of time and, upon awakening, will attempt to remove an item from the buffer. An outline of the producer and consumer threads appears in Figure 7.16.
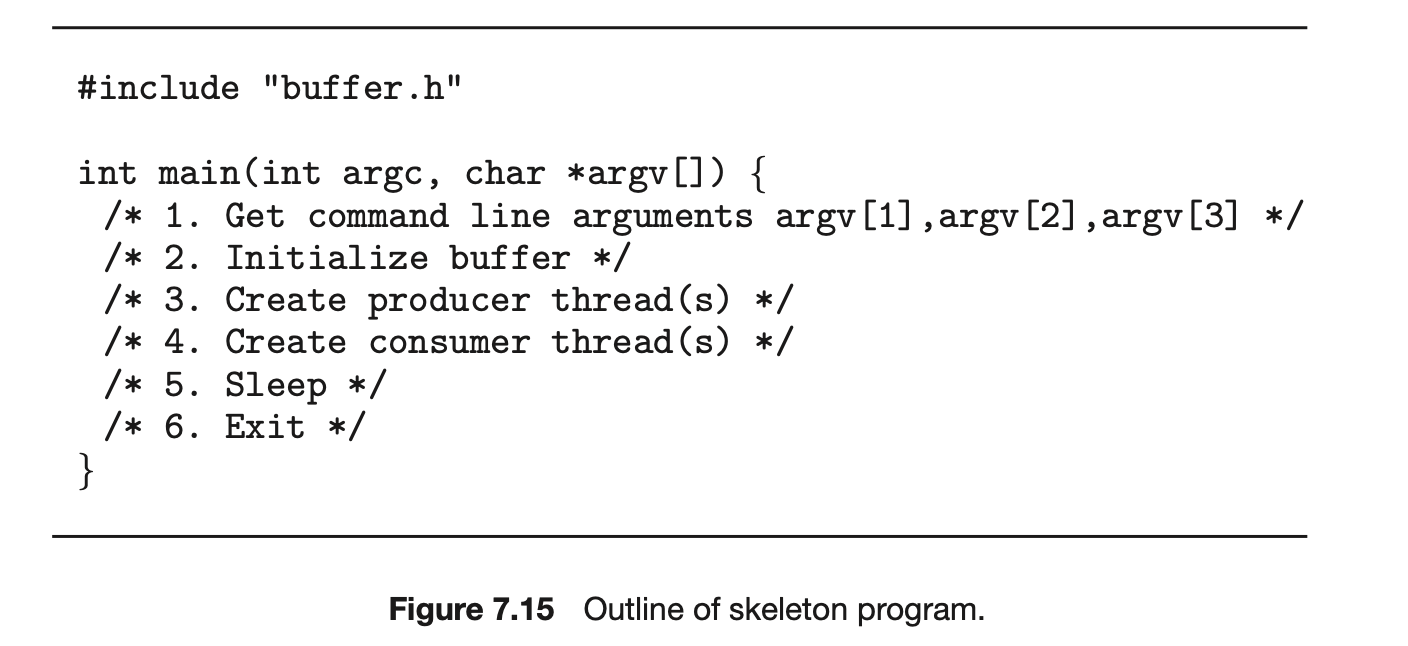
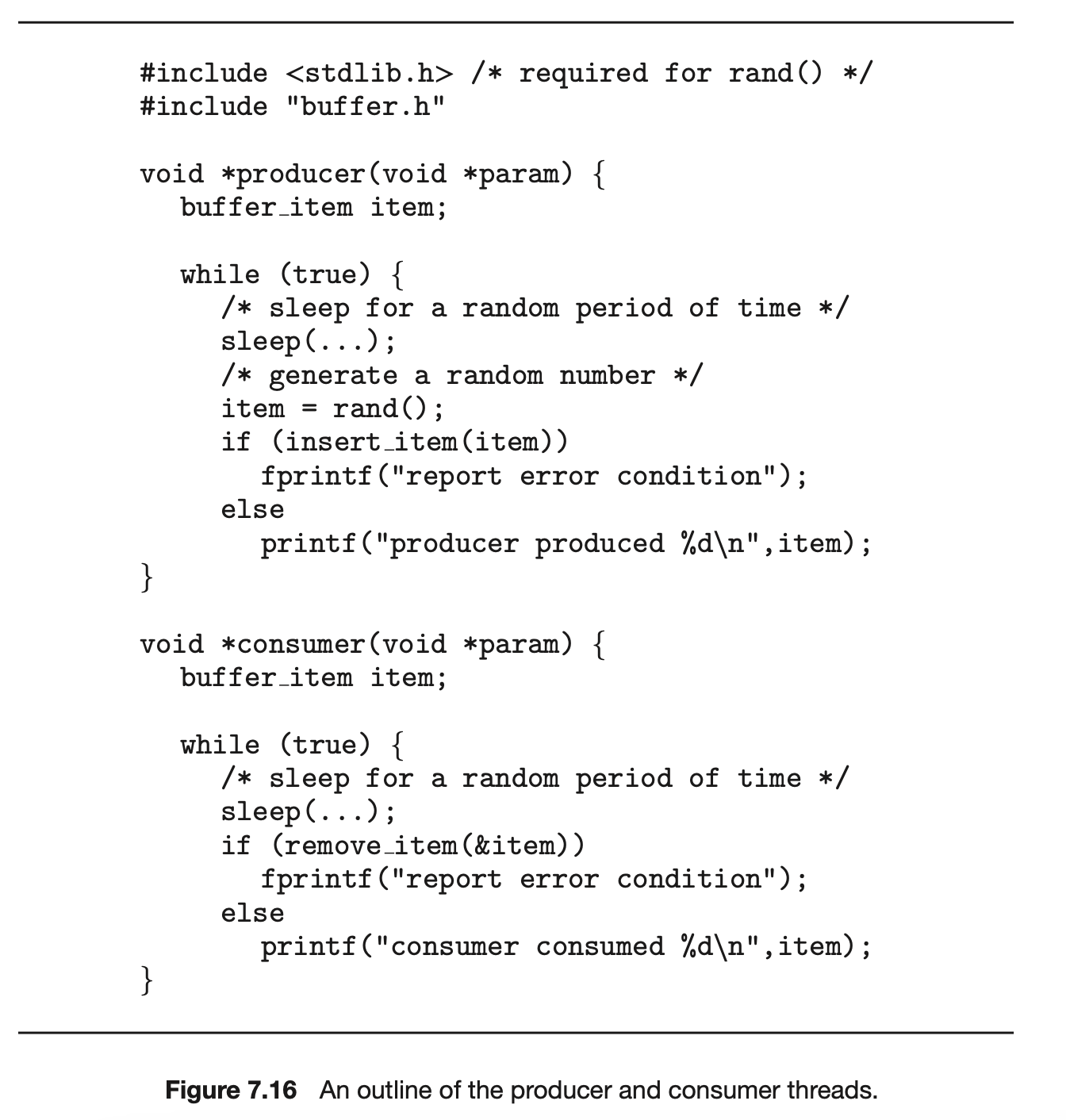
As noted earlier, you can solve this problem using either Pthreads or the Windows API. In the following sections, we supply more information on each of these choices.
Phreads Thread Creation and Synchronization
Creating threads using the Pthreads API is discussed in Section 4.4.1. Coverage of mutex locks and semaphores using Pthreads is provided in Section 7.3. Refer to those sections for specific instructions on Pthreads thread creation and synchronization.
Windows Threads
Section 4.4.2 discusses thread creation using the Windows API. Refer to that section for specific instructions on creating threads.
Windows Mutex Locks
Mutex locks are a type of dispatcher object, as described in Section 7.2.1. The following illustrates how to create a mutex lock using the CreateMutex() function:
 The first parameter refers to a security attribute for the mutex lock. By setting this attribute to NULL, we prevent any children of the process from creating this mutex lock to inherit the handle of the lock. The second parameter indicates whether the creator of the mutex lock is the lock's initial owner. Passing a value of FALSE indicates that the thread creating the mutex is not the initial owner. (We shall soon see how mutex locks are acquired.) The third parameter allows us to name the mutex. However, because we provide a value of NULL, we do not name the mutex. If successful, CreateMutex() returns a HANDLE to the mutex lock; otherwise, it returns NULL.
The first parameter refers to a security attribute for the mutex lock. By setting this attribute to NULL, we prevent any children of the process from creating this mutex lock to inherit the handle of the lock. The second parameter indicates whether the creator of the mutex lock is the lock's initial owner. Passing a value of FALSE indicates that the thread creating the mutex is not the initial owner. (We shall soon see how mutex locks are acquired.) The third parameter allows us to name the mutex. However, because we provide a value of NULL, we do not name the mutex. If successful, CreateMutex() returns a HANDLE to the mutex lock; otherwise, it returns NULL.
In Section 7.2.1, we identified dispatcher objects as being either signaled or nonsignaled. A signaled dispatcher object (such as a mutex lock) is available for ownership. Once it is acquired, it moves to the nonsignaled state. When it is released, it returns to signaled.
Mutex locks are acquired by invoking the WaitForSingleObject() function. The function is passed the HANDLE to the lock along with a flag indicating how long to wait. The following code demonstrates how the mutex lock created above can be acquired:
 The parameter value INFINITE indicates that we will wait an infinite amount of time for the lock to become available. Other values could be used that would allow the calling thread to time out if the lock did not become available within a specified time. If the lock is in a signaled state, WaitForSingleObject() returns immediately, and the lock becomes nonsignaled. A lock is released (moves to the signaled state) by invoking ReleaseMutex() -- for example, as follows:
The parameter value INFINITE indicates that we will wait an infinite amount of time for the lock to become available. Other values could be used that would allow the calling thread to time out if the lock did not become available within a specified time. If the lock is in a signaled state, WaitForSingleObject() returns immediately, and the lock becomes nonsignaled. A lock is released (moves to the signaled state) by invoking ReleaseMutex() -- for example, as follows:

Windows Semaphores
Semaphores in the Windows API are dispatcher objects and thus use the same signaling mechanism as mutex locks. Semaphores are created as follows:
 The first and last parameters identify a security attribute and a name for the semaphore, similar to what we described for mutex locks. The second and third parameters indicate the initial value and maximum value of the semaphore. In this instance, the initial value of the semaphore is 1, and its maximum value is 5. If successful, CreateSemaphore() returns a HANDLE to the mutex lock; otherwise, it returns NULL.
The first and last parameters identify a security attribute and a name for the semaphore, similar to what we described for mutex locks. The second and third parameters indicate the initial value and maximum value of the semaphore. In this instance, the initial value of the semaphore is 1, and its maximum value is 5. If successful, CreateSemaphore() returns a HANDLE to the mutex lock; otherwise, it returns NULL.
Semaphores are acquired with the same WaitForSingleObject() function as mutex locks. We acquire the semaphore Sem created in this example by using the following statement:
 If the value of the semaphore is > 0, the semaphore is in the signaled state and thus is acquired by the calling thread. Otherwise, the calling thread blocks indefinitely--as we are specifying INFINITE--until the semaphore returns to the signaled state.
If the value of the semaphore is > 0, the semaphore is in the signaled state and thus is acquired by the calling thread. Otherwise, the calling thread blocks indefinitely--as we are specifying INFINITE--until the semaphore returns to the signaled state.
The equivalent of the signal() operation for Windows semaphores is the ReleaseSemaphore() function. This function is passed three parameters:
- The HANDLE of the semaphore
- How much to increase the value of the semaphore
- A pointer to the previous value of the semaphore
We can use the following statement to increase Sem by 1:
 Both
Both ReleaseSemaphore() and ReleaseMutex() return a nonzero value if successful and 0 otherwise.
Deadlocks
In a multiprogramming environment, several threads may compete for a finite number of resources. A thread requests resources; if the resources are not available at that time, the thread enters a waiting state. Sometimes, a waiting thread can never again change state, because the resources it has requested are held by other waiting threads. This situation is called a deadlock. We discussed this issue briefly in Chapter 6 as a form of liveness failure. There, we defined deadlock as a situation in which every process in a set of processes is waiting for an event that can be caused only by another process in the set.
Perhaps the best illustration of a deadlock can be drawn from a law passed by the Kansas legislature early in the 20th century. It said, in part: “When two trains approach each other at a crossing, both shall come to a full stop and neither shall start up again until the other has gone.”
In this chapter, we describe methods that application developers as well as operating-system programmers can use to prevent or deal with dead- locks. Although some applications can identify programs that may dead- lock, operating systems typically do not provide deadlock-prevention facil- ities, and it remains the responsibility of programmers to ensure that they design deadlock-free programs. Deadlock problems — as well as other liveness failures—are becoming more challenging as demand continues for increased concurrency and parallelism on multicore systems.
CHAPTER OBJECTIVES
• Illustrate how deadlock can occur when mutex locks are used.
• Define the four necessary conditions that characterize deadlock. • Identify a deadlock situation in a resource allocation graph.
• Evaluate the four different approaches for preventing deadlocks. • Apply the banker’s algorithm for deadlock avoidance.
• Apply the deadlock detection algorithm.
• Evaluate approaches for recovering from deadlock.
8.1 System Model
A system consists of a finite number of resources to be distributed among a number of competing threads. The resources may be partitioned into several types (or classes), each consisting of some number of identical instances. CPU cycles, files, and I/O devices (such as network interfaces and DVD drives) are examples of resource types. If a system has four CPUs, then the resource type has four instances. Similarly, the resource type network may have two instances. If a thread requests an instance of a resource type, the allocation of any instance of the type should satisfy the request. If it does not, then the instances are not identical, and the resource type classes have not been defined properly.
The various synchronization tools discussed in Chapter 6, such as mutex locks and semaphores, are also system resources; and on contemporary computer systems, they are the most common sources of deadlock. However, definition is not a problem here. A lock is typically associated with a specific data structure--that is, one lock may be used to protect access to a queue, another to protect access to a linked list, and so forth. For that reason, each instance of a lock is typically assigned its own resource class.
Note that throughout this chapter we discuss kernel resources, but threads may use resources from other processes (for example, via interprocess communication), and those resource uses can also result in deadlock. Such deadlocks are not the concern of the kernel and thus not described here.
A thread must request a resource before using it and must release the resource after using it. A thread may request as many resources as it requires to carry out its designated task. Obviously, the number of resources requested may not exceed the total number of resources available in the system. In other words, a thread cannot request two network interfaces if the system has only one.
Under the normal mode of operation, a thread may utilize a resource in only the following sequence:
- Request. The thread requests the resource. If the request cannot be granted immediately (for example, if a mutex lock is currently held by another thread), then the requesting thread must wait until it can acquire the resource.
- Use. The thread can operate on the resource (for example, if the resource is a mutex lock, the thread can access its critical section).
- Release. The thread releases the resource.
The request and release of resources may be system calls, as explained in Chapter 2. Examples are the request() and release() of a device, open() and close() of a file, and allocate() and free() memory system calls. Similarly, as we saw in Chapter 6, request and release can be accomplished through the wait() and signal() operations on semaphores and through acquire() and release() of a mutex lock. For each use of a kernel-managed resource by a thread, the operating system checks to make sure that the thread has requested and has been allocated the resource. A system table records whether each resource is free or allocated. For each resource that is allocated,the table also records the thread to which it is allocated. If a thread requests a resource that is currently allocated to another thread, it can be added to a queue of threads waiting for this resource.
A set of threads is in a deadlocked state when every thread in the set is wait- ing for an event that can be caused only by another thread in the set. The events with which we are mainly concerned here are resource acquisition and release. The resources are typically logical (for example, mutex locks, semaphores, and files); however, other types of events may result in deadlocks, including read- ing from a network interface or the IPC (interprocess communication) facilities discussed in Chapter 3.
To illustrate a deadlocked state, we refer back to the dining-philosophers problem from Section 7.1.3. In this situation, resources are represented by chopsticks. If all the philosophers get hungry at the same time, and each philosopher grabs the chopstick on her left, there are no longer any available chopsticks. Each philosopher is then blocked waiting for her right chopstick to become available.
Developers of multithreaded applications must remain aware of the pos- sibility of deadlocks. The locking tools presented in Chapter 6 are designed to avoid race conditions. However, in using these tools, developers must pay careful attention to how locks are acquired and released. Otherwise, deadlock can occur, as described next.
8.2 Deadlock in Multithreaded Applications
Prior to examining how deadlock issues can be identified and man- aged, we first illustrate how deadlock can occur in a multithreaded Pthread program using POSIX mutex locks. The pthread mutex init() function initializes an unlocked mutex. Mutex locks are acquired and released using pthread mutex lock() and pthread mutex unlock(), respectively. If a thread attempts to acquire a locked mutex, the call to pthread mutex lock() blocks the thread until the owner of the mutex lock invokes pthread mutex unlock().
Two mutex locks are created and initialized in the following code example:
 Next, two threads—thread one and thread two—are created, and both these threads have access to both mutex locks. thread one and thread two run in the functions do work one() and do work two(), respectively, as shown in Figure 8.1.
Next, two threads—thread one and thread two—are created, and both these threads have access to both mutex locks. thread one and thread two run in the functions do work one() and do work two(), respectively, as shown in Figure 8.1.
In this example, thread one attempts to acquire the mutex locks in the order (1) first mutex, (2) second mutex. At the same time, thread two attempts to acquire the mutex locks in the order (1) second mutex, (2) first mutex. Deadlock is possible if thread one acquires first mutex while thread two acquires second mutex.
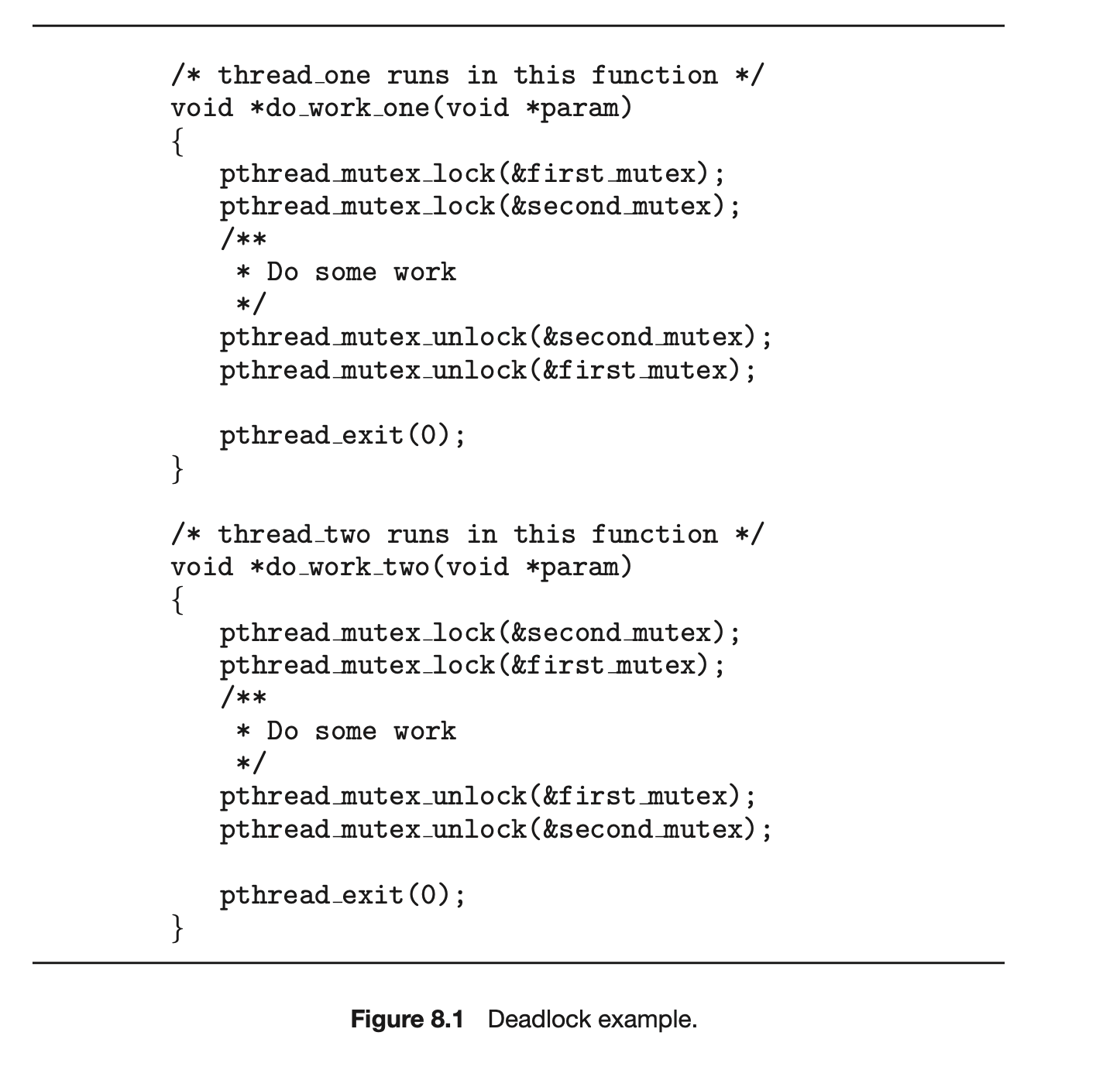
Note that, even though deadlock is possible, it will not occur if thread_one can acquire and release the mutex locks for first_mutex and second_mutex before thread_two attempts to acquire the locks. And, of course, the order in which the threads run depends on how they are scheduled by the CPU scheduler. This example illustrates a problem with handling deadlocks: it is difficult to identify and test for deadlocks that may occur only under certain scheduling circumstances.
8.2.1 Livelock
Livelock is another form of liveness failure. It is similar to deadlock; both prevent two or more threads from proceeding, but the threads are unable to proceed for different reasons. Whereas deadlock occurs when every thread in a set is blocked waiting for an event that can be caused only by another thread in the set, livelock occurs when a thread continuously attempts an action that fails. Livelock is similar to what sometimes happens when two people attempt to pass in a hallway: One moves to his right, the other to her left, still obstructing each other's progress. Then he moves to his left, and she moves to her right, and so forth. They aren't blocked, but they aren't making any progress.
Livelock can be illustrated with the Pthreads pthread_mutex_trylock() function, which attempts to acquire a mutex lock without blocking. The code example in Figure 8.2 rewrites the example from Figure 8.1 so that it now uses pthread_mutex_trylock(). This situation can lead to livelock if thread_one acquires first_mutex, followed by thread_two acquiring second_mutex. Each thread then invokes pthread_mutex_trylock(), which fails, releases their respective locks, and repeats the same actions indefinitely.
Livelock typically occurs when threads retry failing operations at the same time. It thus can generally be avoided by having each thread retry the failing operation at random times. This is precisely the approach taken by Ethernet networks when a network collision occurs. Rather than trying to retransmit a packet immediately after a collision occurs, a host involved in a collision will backoff a random period of time before attempting to transmit again.
Livelock is less common than deadlock but nonetheless is a challenging issue in designing concurrent applications, and like deadlock, it may only occur under specific scheduling circumstances.
8.3 Deadlock Characterization
In the previous section we illustrated how deadlock could occur in multi-threaded programming using mutex locks. We now look more closely at conditions that characterize deadlock.
8.3.1 Necessary Conditions
A deadlock situation can arise if the following four conditions hold simultaneously in a system:
- Mutual exclusion. At least one resource must be held in a nonsharable mode; that is, only one thread at a time can use the resource. If another thread requests that resource, the requesting thread must be delayed until the resource has been released.
- Hold and wait. A thread must be holding at least one resource and waiting to acquire additional resources that are currently being held by other threads.
- No preemption. Resources cannot be preempted; that is, a resource can be released only voluntarily by the thread holding it, after that thread has completed its task.
- Circular wait. A set , ,..., of waiting threads must exist such that is waiting for a resource held by , is waiting for a resource held by ,..., is waiting for a resource held by , and is waiting for a resource held by .
We emphasize that all four conditions must hold for a deadlock to occur. The circular-wait condition implies the hold-and-wait condition, so the four
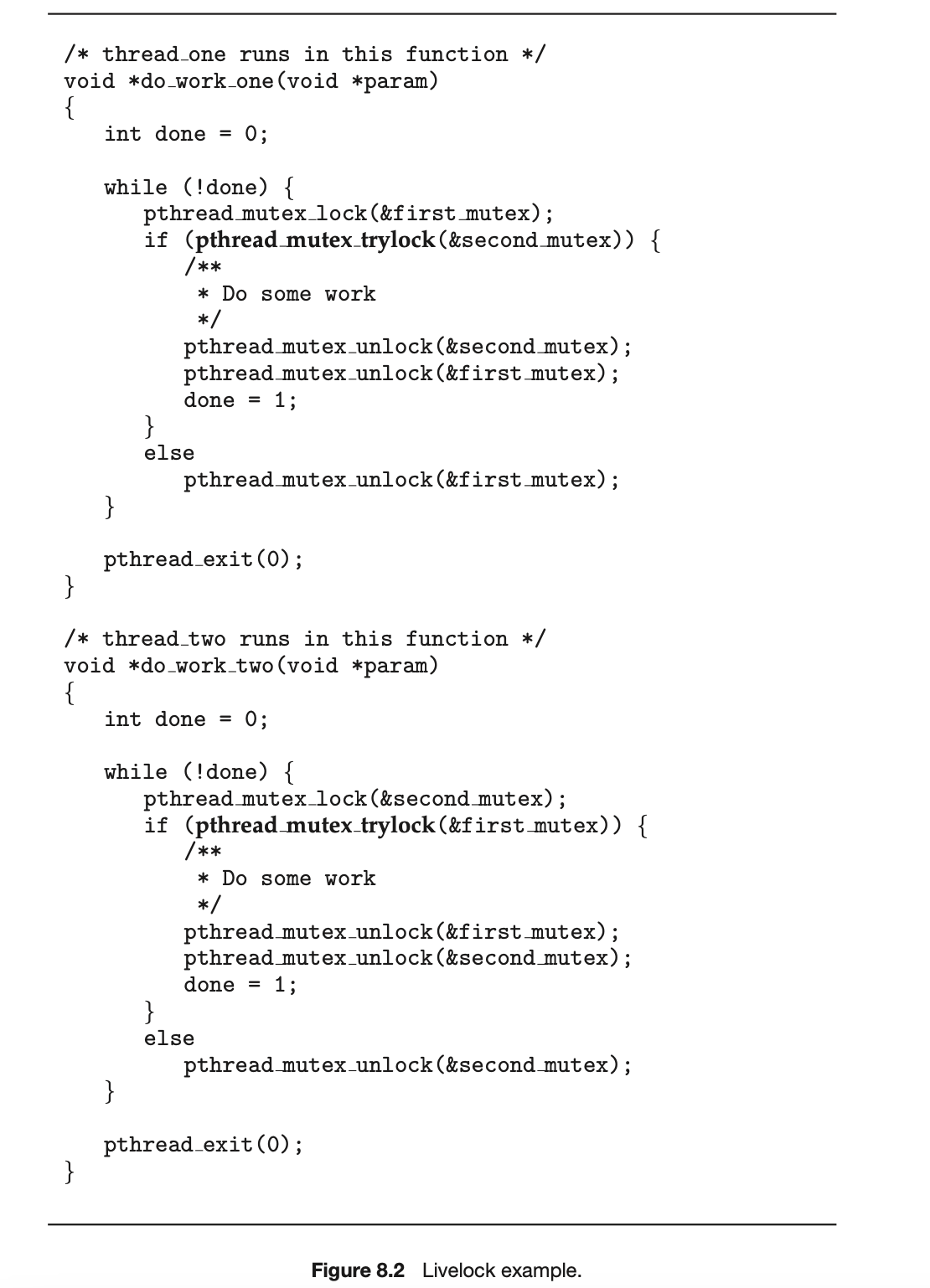
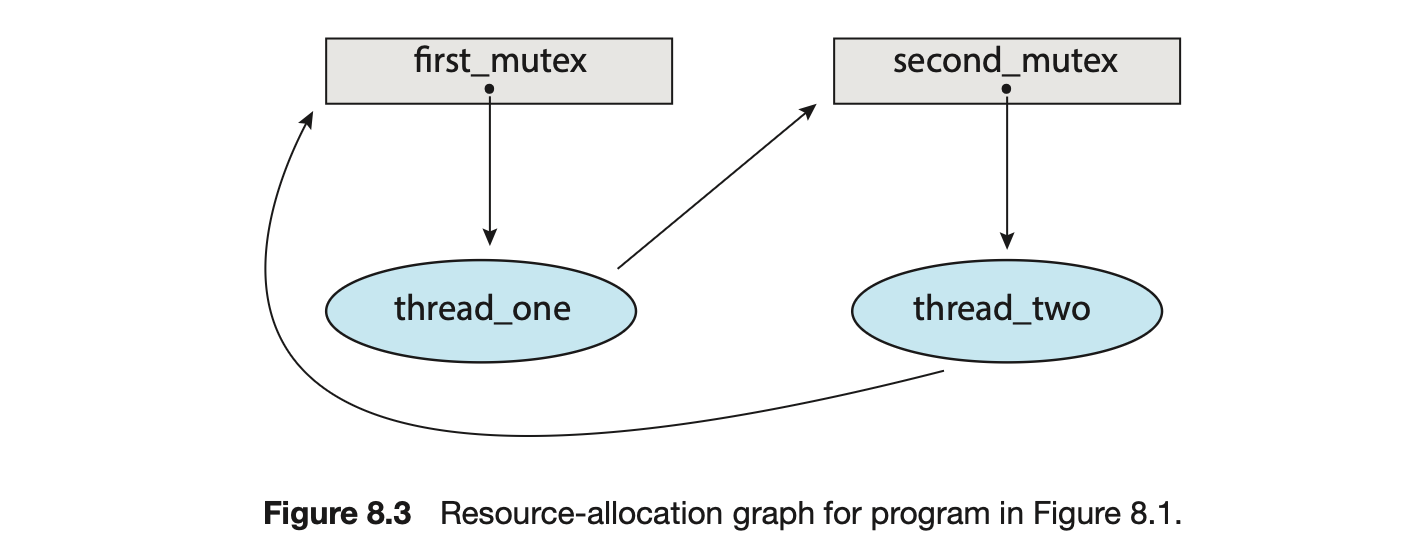 conditions are not completely independent. We shall see in Section 8.5, however, that it is useful to consider each condition separately.
conditions are not completely independent. We shall see in Section 8.5, however, that it is useful to consider each condition separately.
8.3.2 Resource-Allocation Graph
Deadlocks can be described more precisely in terms of a directed graph called a system resource-allocation graph. This graph consists of a set of vertices V and a set of edges E. The set of vertices V is partitioned into two different types of nodes: , the set consisting of all the active threads in the system, and , the set consisting of all resource types in the system.
A directed edge from thread to resource type is denoted by ; it signifies that thread has requested an instance of resource type and is currently waiting for that resource. A directed edge from resource type to thread is denoted by ; it signifies that an instance of resource type has been allocated to thread . A directed edge is called a request edge; a directed edge is called an assignment edge.
Pictorially, we represent each thread as a circle and each resource type as a rectangle. As a simple example, the resource allocation graph shown in Figure 8.3 illustrates the deadlock situation from the program in Figure 8.1. Since resource type may have more than one instance, we represent each such instance as a dot within the rectangle. Note that a request edge points only to the rectangle , whereas an assignment edge must also designate one of the dots in the rectangle.
When thread requests an instance of resource type , a request edge is inserted in the resource-allocation graph. When this request can be fulfilled, the request edge is instantaneously transformed to an assignment edge. When the thread no longer needs access to the resource, it releases the resource. As a result, the assignment edge is deleted.
The resource-allocation graph shown in Figure 8.4 depicts the following situation.
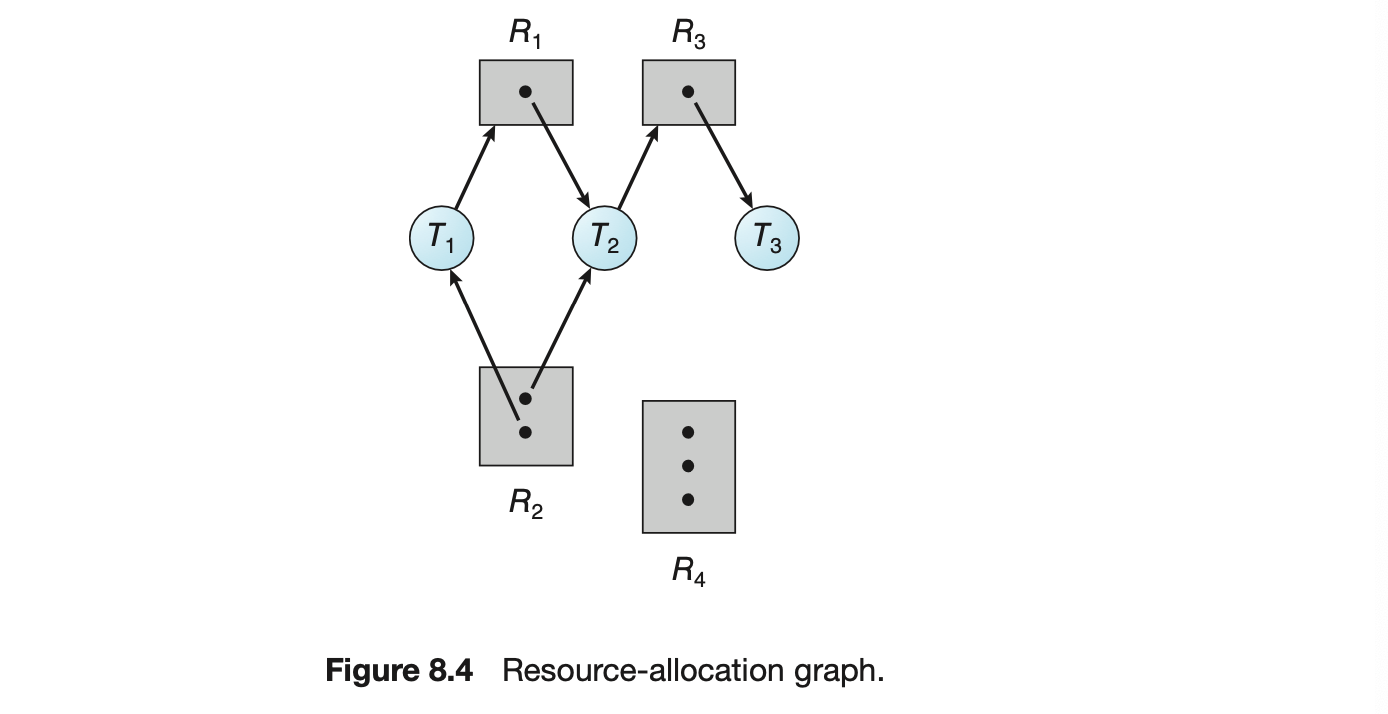
-
The sets and :
- circ
-
Resource instances:
- One instance of resource type
- Two instances of resource type
- One instance of resource type
- Three instances of resource type
-
Thread states:
- Thread is holding an instance of resource type and is waiting for an instance of resource type .
- Thread is holding an instance of and an instance of and is waiting for an instance of .
- Thread is holding an instance of .
Given the definition of a resource-allocation graph, it can be shown that, if the graph contains no cycles, then no thread in the system is deadlocked. If the graph does contain a cycle, then a deadlock may exist.
If each resource type has exactly one instance, then a cycle implies that a deadlock has occurred. If the cycle involves only a set of resource types, each of which has only a single instance, then a deadlock has occurred. Each thread involved in the cycle is deadlocked. In this case, a cycle in the graph is both a necessary and a sufficient condition for the existence of deadlock.
If each resource type has several instances, then a cycle does not necessarily imply that a deadlock has occurred. In this case, a cycle in the graph is a necessary but not a sufficient condition for the existence of deadlock.
To illustrate this concept, we return to the resource-allocation graph depicted in Figure 8.4. Suppose that thread requests an instance of resource type . Since no resource instance is currently available, we add a request
Figure 8.4: Resource-allocation graph.
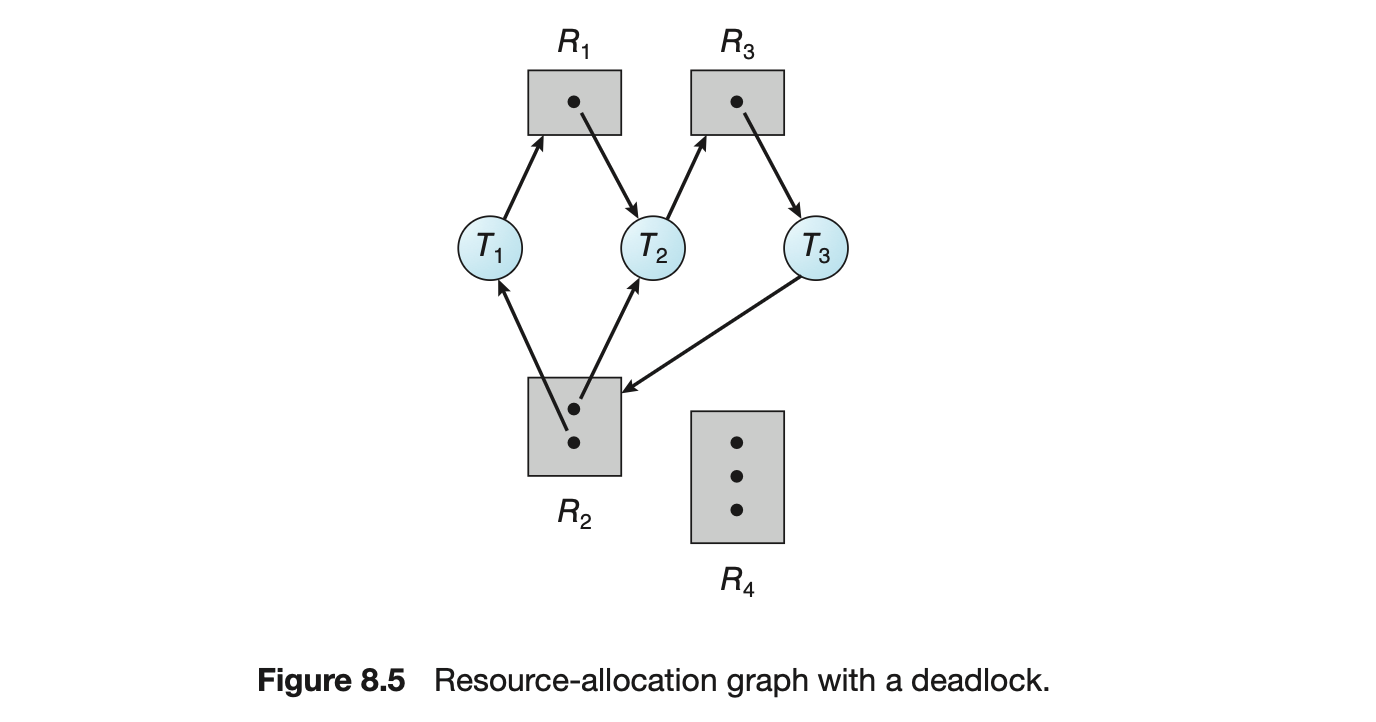
edge to the graph (Figure 8.5). At this point, two minimal cycles exist in the system:
 Threads , and are deadlocked. Thread is waiting for the resource , which is held by thread . Thread is waiting for either thread or thread to release resource . In addition, thread is waiting for thread to release resource .
Threads , and are deadlocked. Thread is waiting for the resource , which is held by thread . Thread is waiting for either thread or thread to release resource . In addition, thread is waiting for thread to release resource .
Now consider the resource-allocation graph in Figure 8.6. In this example, we also have a cycle:

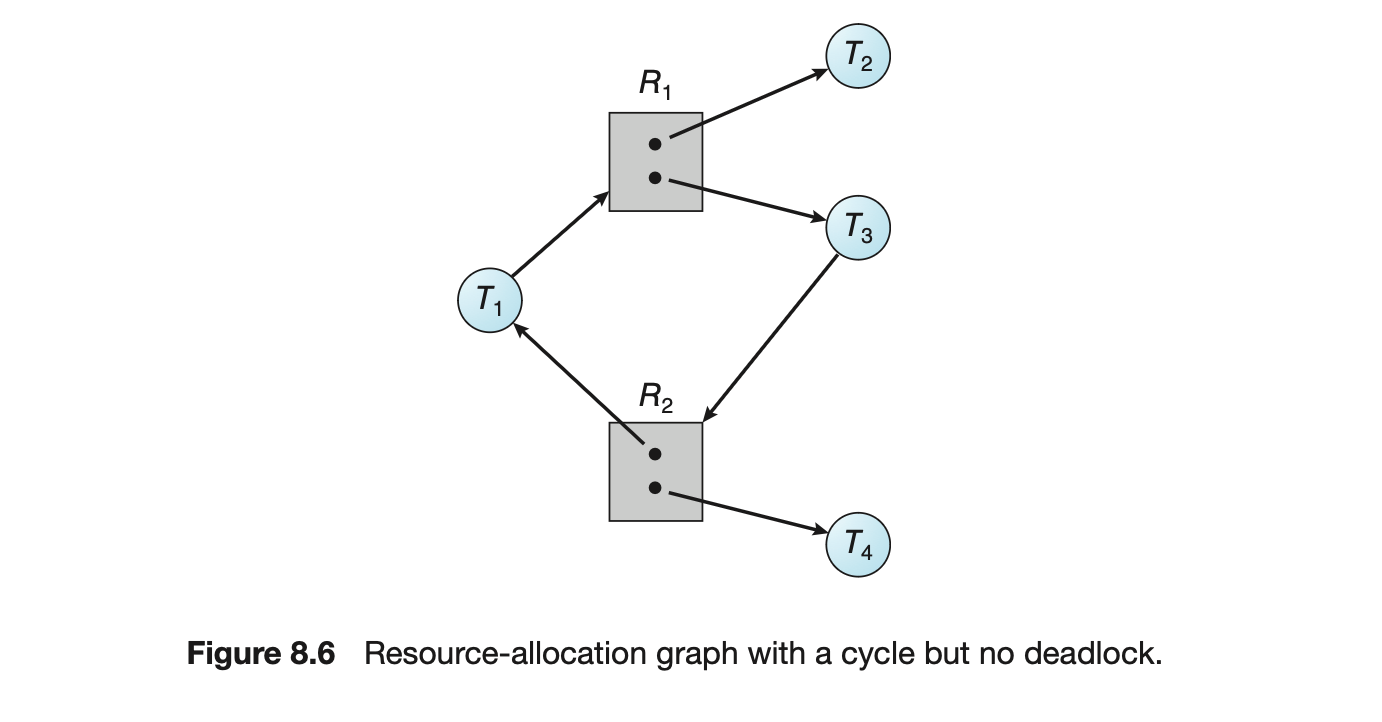 However, there is no deadlock. Observe that thread may release its instance of resource type . That resource can then be allocated to , breaking the cycle.
However, there is no deadlock. Observe that thread may release its instance of resource type . That resource can then be allocated to , breaking the cycle.
In summary, if a resource-allocation graph does not have a cycle, then the system is not in a deadlocked state. If there is a cycle, then the system may or may not be in a deadlocked state. This observation is important when we deal with the deadlock problem.
8.4 Methods for Handling Deadlocks
Generally speaking, we can deal with the deadlock problem in one of three ways:
- We can ignore the problem altogether and pretend that deadlocks never occur in the system.
- We can use a protocol to prevent or avoid deadlocks, ensuring that the system will never enter a deadlocked state.
- We can allow the system to enter a deadlocked state, detect it, and recover.
The first solution is the one used by most operating systems, including Linux and Windows. It is then up to kernel and application developers to write programs that handle deadlocks, typically using approaches outlined in the second solution. Some systems--such as databases--adopt the third solution, allowing deadlocks to occur and then managing the recovery.
Next, we elaborate briefly on the three methods for handling deadlocks. Then, in Section 8.5 through Section 8.8, we present detailed algorithms. Before proceeding, we should mention that some researchers have argued that none of the basic approaches alone is appropriate for the entire spectrum of resource-allocation problems in operating systems. The basic approaches can be combined, however, allowing us to select an optimal approach for each class of resources in a system.
To ensure that deadlocks never occur, the system can use either a deadlock-prevention or a deadlock-avoidance scheme. Deadlock prevention provides a set of methods to ensure that at least one of the necessary conditions (Section 8.3.1) cannot hold. These methods prevent deadlocks by constraining how requests for resources can be made. We discuss these methods in Section 8.5.
Deadlock avoidance requires that the operating system be given additional information in advance concerning which resources a thread will request and use during its lifetime. With this additional knowledge, the operating system can decide for each request whether or not the thread should wait. To decide whether the current request can be satisfied or must be delayed, the system must consider the resources currently available, the resources currently allocated to each thread, and the future requests and releases of each thread. We discuss these schemes in Section 8.6.
If a system does not employ either a deadlock-prevention or a deadlock-avoidance algorithm, then a deadlock situation may arise. In this environment, the system can provide an algorithm that examines the state of the system to determine whether a deadlock has occurred and an algorithm to recover from the deadlock (if a deadlock has indeed occurred). We discuss these issues in Section 8.7 and Section 8.8.
In the absence of algorithms to detect and recover from deadlocks, we may arrive at a situation in which the system is in a deadlocked state yet has no way of recognizing what has happened. In this case, the undetected deadlock will cause the system's performance to deteriorate, because resources are being held by threads that cannot run and because more and more threads, as they make requests for resources, will enter a deadlocked state. Eventually, the system will stop functioning and will need to be restarted manually.
Although this method may not seem to be a viable approach to the deadlock problem, it is nevertheless used in most operating systems, as mentioned earlier. Expense is one important consideration. Ignoring the possibility of deadlocks is cheaper than the other approaches. Since in many systems, deadlocks occur infrequently (say, once per month), the extra expense of the other methods may not seem worthwhile.
In addition, methods used to recover from other liveness conditions, such as livelock, may be used to recover from deadlock. In some circumstances, a system is suffering from a liveness failure but is not in a deadlocked state. We see this situation, for example, with a real-time thread running at the highest priority (or any thread running on a nonpreemptive scheduler) and never returning control to the operating system. The system must have manual recovery methods for such conditions and may simply use those techniques for deadlock recovery.
8.5 Deadlock Prevention
As we noted in Section 8.3.1, for a deadlock to occur, each of the four necessary conditions must hold. By ensuring that at least one of these conditions cannot hold, we can prevent the occurrence of a deadlock. We elaborate on this approach by examining each of the four necessary conditions separately.
8.5.1 Mutual Exclusion
The mutual-exclusion condition must hold. That is, at least one resource must be nonsharable. Sharable resources do not require mutually exclusive access and thus cannot be involved in a deadlock. Read-only files are a good example of a sharable resource. If several threads attempt to open a read-only file at the same time, they can be granted simultaneous access to the file. A thread never needs to wait for a sharable resource. In general, however, we cannot prevent deadlocks by denying the mutual-exclusion condition, because some resources are intrinsically nonsharable. For example, a mutex lock cannot be simultaneously shared by several threads.
8.5.2 Hold and Wait
To ensure that the hold-and-wait condition never occurs in the system, we must guarantee that, whenever a thread requests a resource, it does not hold any other resources. One protocol that we can use requires each thread to request and be allocated all its resources before it begins execution. This is, of course,impractical for most applications due to the dynamic nature of requesting resources.
An alternative protocol allows a thread to request resources only when it has none. A thread may request some resources and use them. Before it can request any additional resources, it must release all the resources that it is currently allocated.
Both these protocols have two main disadvantages. First, resource utilization may be low, since resources may be allocated but unused for a long period. For example, a thread may be allocated a mutex lock for its entire execution, yet only require it for a short duration. Second, starvation is possible. A thread that needs several popular resources may have to wait indefinitely, because at least one of the resources that it needs is always allocated to some other thread.
8.5.3 No Preemption
The third necessary condition for deadlocks is that there be no preemption of resources that have already been allocated. To ensure that this condition does not hold, we can use the following protocol. If a thread is holding some resources and requests another resource that cannot be immediately allocated to it (that is, the thread must wait), then all resources the thread is currently holding are preempted. In other words, these resources are implicitly released. The preempted resources are added to the list of resources for which the thread is waiting. The thread will be restarted only when it can regain its old resources, as well as the new ones that it is requesting.
Alternatively, if a thread requests some resources, we first check whether they are available. If they are, we allocate them. If they are not, we check whether they are allocated to some other thread that is waiting for additional resources. If so, we preempt the desired resources from the waiting thread and allocate them to the requesting thread. If the resources are neither available nor held by a waiting thread, the requesting thread must wait. While it is waiting, some of its resources may be preempted, but only if another thread requests them. A thread can be restarted only when it is allocated the new resources it is requesting and recovers any resources that were preempted while it was waiting.
This protocol is often applied to resources whose state can be easily saved and restored later, such as CPU registers and database transactions. It cannot generally be applied to such resources as mutex locks and semaphores, precisely the type of resources where deadlock occurs most commonly.
8.5.4 Circular Wait
The three options presented thus far for deadlock prevention are generally impractical in most situations. However, the fourth and final condition for deadlocks -- the circular-wait condition -- presents an opportunity for a practical solution by invalidating one of the necessary conditions. One way to ensure that this condition never holds is to impose a total ordering of all resource types and to require that each thread requests resources in an increasing order of enumeration.
To illustrate, we let = {, ,..., } be the set of resource types. We assign to each resource type a unique integer number, which allows us to
Deadlock Prevention
Compare two resources and to determine whether one precedes another in our ordering. Formally, we define a one-to-one function : , where is the set of natural numbers. We can accomplish this scheme in an application program by developing an ordering among all synchronization objects in the system. For example, the lock ordering in the Pthread program shown in Figure 8.1 could be
 We can now consider the following protocol to prevent deadlocks: Each thread can request resources only in an increasing order of enumeration. That is, a thread can initially request an instance of a resource--say, . After that, the thread can request an instance of resource if and only if . For example, using the function defined above, a thread that wants to use both first_mutex and second_mutex at the same time must first request first_mutex and then second_mutex. Alternatively, we can require that a thread requesting an instance of resource must have released any resources such that . Note also that if several instances of the same resource type are needed, a single request for all of them must be issued.
We can now consider the following protocol to prevent deadlocks: Each thread can request resources only in an increasing order of enumeration. That is, a thread can initially request an instance of a resource--say, . After that, the thread can request an instance of resource if and only if . For example, using the function defined above, a thread that wants to use both first_mutex and second_mutex at the same time must first request first_mutex and then second_mutex. Alternatively, we can require that a thread requesting an instance of resource must have released any resources such that . Note also that if several instances of the same resource type are needed, a single request for all of them must be issued.
If these two protocols are used, then the circular-wait condition cannot hold. We can demonstrate this fact by assuming that a circular wait exists (proof by contradiction). Let the set of threads involved in the circular wait be , ,..., , where is waiting for a resource , which is held by thread . (Modulo arithmetic is used on the indexes, so that is waiting for a resource held by .) Then, since thread is holding resource while requesting resource , we must have for all . But this condition means that . By transitivity, , which is impossible. Therefore, there can be no circular wait.
Keep in mind that developing an ordering, or hierarchy, does not in itself prevent deadlock. It is up to application developers to write programs that follow the ordering. However, establishing a lock ordering can be difficult, especially on a system with hundreds--or thousands--of locks. To address this challenge, many Java developers have adopted the strategy of using the method System.identityHashCode(Object) (which returns the default hash code value of the Object parameter it has been passed) as the function for ordering lock acquisition.
It is also important to note that imposing a lock ordering does not guarantee deadlock prevention if locks can be acquired dynamically. For example, assume we have a function that transfers funds between two accounts. To prevent a race condition, each account has an associated mutex lock that is obtained from a get_lock() function such as that shown in Figure 8.7. Deadlock is possible if two threads simultaneously invoke the transaction() function, transposing different accounts. That is, one thread might invoke
 and another might invoke
and another might invoke

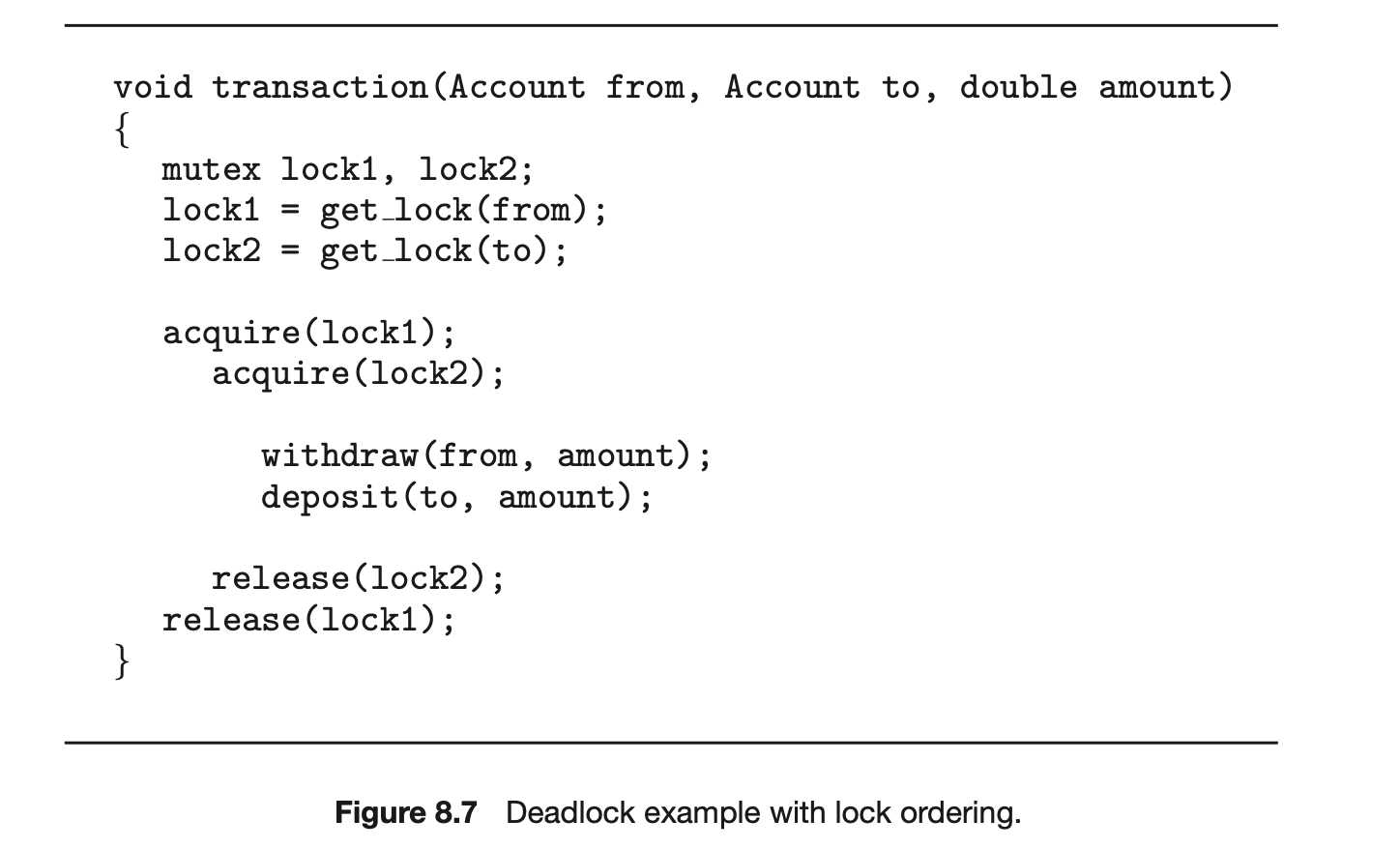
8.6 Deadlock Avoidance
Deadlock-prevention algorithms, as discussed in Section 8.5, prevent dead- locks by limiting how requests can be made. The limits ensure that at least one of the necessary conditions for deadlock cannot occur. Possible side effects of preventing deadlocks by this method, however, are low device utilization and reduced system throughput.
An alternative method for avoiding deadlocks is to require additional information about how resources are to be requested. For example, in a system with resources R1 and R2, the system might need to know that thread P will request first R1 and then R2 before releasing both resources, whereas thread Q will request R2 and then R1. With this knowledge of the complete sequence of requests and releases for each thread, the system can decide for each request whether or not the thread should wait in order to avoid a possible future deadlock. Each request requires that in making this decision the system consider the resources currently available, the resources currently allocated to each thread, and the future requests and releases of each thread.
The various algorithms that use this approach differ in the amount and type of information required. The simplest and most useful model requires that each thread declare the maximum number of resources of each type that it may need. Given this a priori information, it is possible to construct an algorithm that ensures that the system will never enter a deadlocked state. A deadlock- avoidance algorithm dynamically examines the resource-allocation state to ensure that a circular-wait condition can never exist. The resource-allocation state is defined by the number of available and allocated resources and the maximum demands of the threads. In the following sections, we explore two deadlock-avoidance algorithms.
LINUX LOCKDEP TOOL
Although ensuring that resources are acquired in the proper order is the responsibility of kernel and application developers, certain software can be used to verify that locks are acquired in the proper order. To detect possible deadlocks, Linux provides lockdep, a tool with rich functionality that can be used to verify locking order in the kernel. lockdep is designed to be enabled on a running kernel as it monitors usage patterns of lock acquisitions and releases against a set of rules for acquiring and releasing locks. Two examples follow, but note that lockdep provides significantly more functionality than what is described here:
Theorderinwhichlocksareacquiredisdynamicallymaintainedbythe system. If lockdep detects locks being acquired out of order, it reports a possible deadlock condition.
In Linux, spinlocks can be used in interrupt handlers. A possible source of deadlock occurs when the kernel acquires a spinlock that is also used in an interrupt handler. If the interrupt occurs while the lock is being held, the interrupt handler preempts the kernel code currently holding the lock and then spins while attempting to acquire the lock, resulting in deadlock. The general strategy for avoiding this situation is to disable interrupts on the current processor before acquiring a spinlock that is also used in an interrupt handler. If lockdep detects that interrupts are enabled while kernel code acquires a lock that is also used in an interrupt handler, it will report a possible deadlock scenario. lockdep was developed to be used as a tool in developing or modifying code in the kernel and not to be used on production systems, as it can significantly slow down a system. Its purpose is to test whether software such as a new device driver or kernel module provides a possible source of deadlock. The designers of lockdep have reported that within a few years of its development in 2006, the number of deadlocks from system reports had been reduced by an order of magnitude.⣞ Although lockdep was originally designed only for use in the kernel, recent revisions of this tool can now be used for detecting deadlocks in user applications using Pthreads mutex locks. Further details on the lockdep tool can be found at https://www.kernel.org/doc/Documentation/locking/lockdep-design.txt.
8.6.1 Safe State
A state is safe if the system can allocate resources to each thread (up to its maximum) in some order and still avoid a deadlock. More formally, a system is in a safe state only if there exists a safe sequence. A sequence of threads <, ,..., > is a safe sequence for the current allocation state if, for each , the resource requests that can still make can be satisfied by the currently available resources plus the resources held by all , with . In this situation, if the resources that needs are not immediately available, then can wait until all have finished. When they have finished, can obtain all of itsneeded resources, complete its designated task, return its allocated resources, and terminate. When terminates, can obtain its needed resources, and so on. If no such sequence exists, then the system state is said to be unsafe.
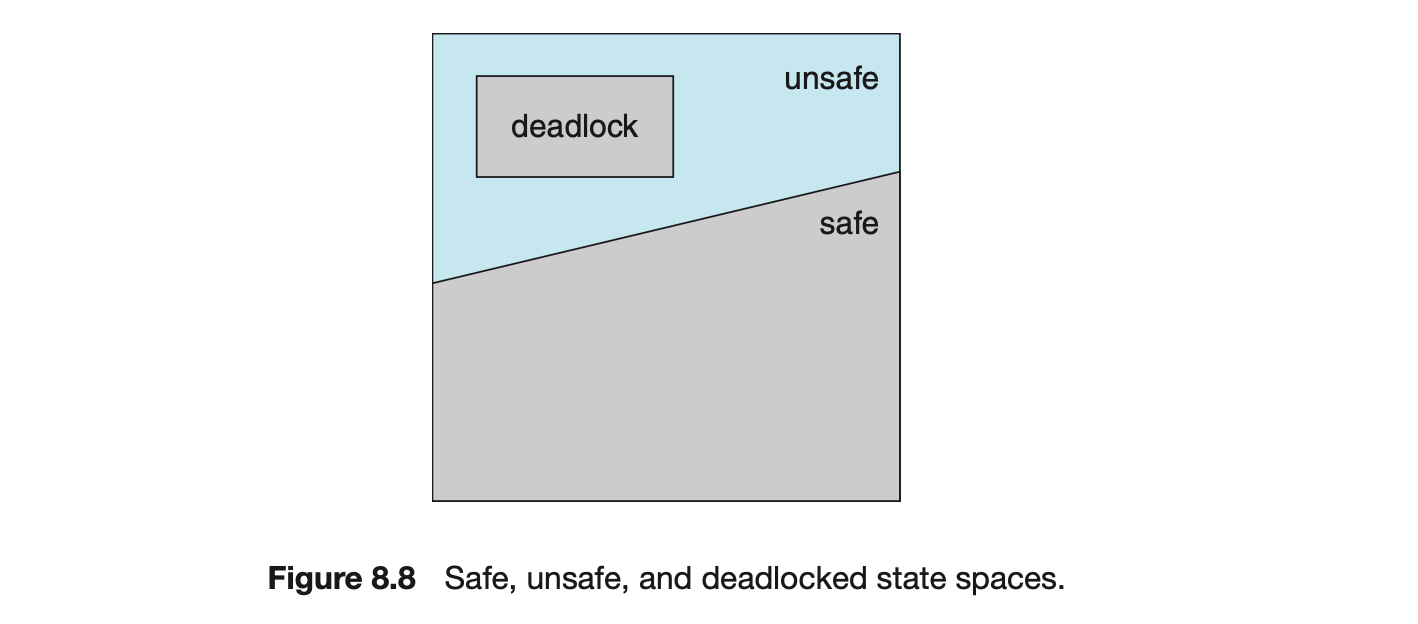
A safe state is not a deadlocked state. Conversely, a deadlocked state is an unsafe state. Not all unsafe states are deadlocks, however (Figure 8.8). An unsafe state may lead to a deadlock. As long as the state is safe, the operating system can avoid unsafe (and deadlocked) states. In an unsafe state, the operating system cannot prevent threads from requesting resources in such a way that a deadlock occurs. The behavior of the threads controls unsafe states.
To illustrate, consider a system with twelve resources and three threads: , , and . Thread requires ten resources, thread may need as many as four, and thread may need up to nine resources. Suppose that, at time , thread is holding five resources, thread is holding two resources, and thread is holding two resources. (Thus, there are three free resources.)

At time , the system is in a safe state. The sequence <, , > satisfies the safety condition. Thread can immediately be allocated all its resources and then return them (the system will then have five available resources); then thread can get all its resources and return them (the system will then have ten available resources); and finally thread can get all its resources and return them (the system will then have all twelve resources available).
A system can go from a safe state to an unsafe state. Suppose that, at time , thread requests and is allocated one more resource. The system is no longer in a safe state. At this point, only thread can be allocated all its resources. When it returns them, the system will have only four available resources. Since thread is allocated five resources but has a maximum of ten, it may request five more resources. If it does so, it will have to wait, because they are unavailable. Similarly, thread may request six additional resources and have to wait, resulting in a deadlock. Our mistake was in granting the request from thread for one more resource. If we had made wait until either of the other threads had finished and released its resources, then we could have avoided the deadlock.
Given the concept of a safe state, we can define avoidance algorithms that ensure that the system will never deadlock. The idea is simply to ensure that the system will always remain in a safe state. Initially, the system is in a safe state. Whenever a thread requests a resource that is currently available, the system must decide whether the resource can be allocated immediately or the thread must wait. The request is granted only if the allocation leaves the system in a safe state.
In this scheme, if a thread requests a resource that is currently available, it may still have to wait. Thus, resource utilization may be lower than it would otherwise be.
8.6.2 Resource-Allocation-Graph Algorithm
If we have a resource-allocation system with only one instance of each resource type, we can use a variant of the resource-allocation graph defined in Section 8.3.2 for deadlock avoidance. In addition to the request and assignment edges already described, we introduce a new type of edge, called a claim edge. A claim edge indicates that thread may request resource at some time in the future. This edge resembles a request edge in direction but is represented in the graph by a dashed line. When thread requests resource , the claim edge is converted to a request edge. Similarly, when a resource is released by , the assignment edge is reconverted to a claim edge .
Note that the resources must be claimed a priori in the system. That is, before thread starts executing, all its claim edges must already appear in the resource-allocation graph. We can relax this condition by allowing a claim edge to be added to the graph only if all the edges associated with thread are claim edges.
Now suppose that thread requests resource . The request can be granted only if converting the request edge to an assignment edge does not result in the formation of a cycle in the resource-allocation graph. We check for safety by using a cycle-detection algorithm. An algorithm for detecting a cycle in this graph requires an order of operations, where is the number of threads in the system.
If no cycle exists, then the allocation of the resource will leave the system in a safe state. If a cycle is found, then the allocation will put the system in an unsafe state. In that case, thread will have to wait for its requests to be satisfied.
To illustrate this algorithm, we consider the resource-allocation graph of Figure 8.9. Suppose that requests . Although is currently free, we cannot allocate it to , since this action will create a cycle in the graph (Figure 8.10). A cycle, as mentioned, indicates that the system is in an unsafe state. If requests , and requests , then a deadlock will occur.
8.6.3 Banker's Algorithm
The resource-allocation-graph algorithm is not applicable to a resource-allocation system with multiple instances of each resource type. The deadlock-avoidance algorithm that we describe next is applicable to such a system but is less efficient than the resource-allocation graph scheme. This algorithm is commonly known as the banker's algorithm. The name was chosen because the algorithm could be used in a banking system to ensure that the bank never allocated its available cash in such a way that it could no longer satisfy the needs of all its customers.
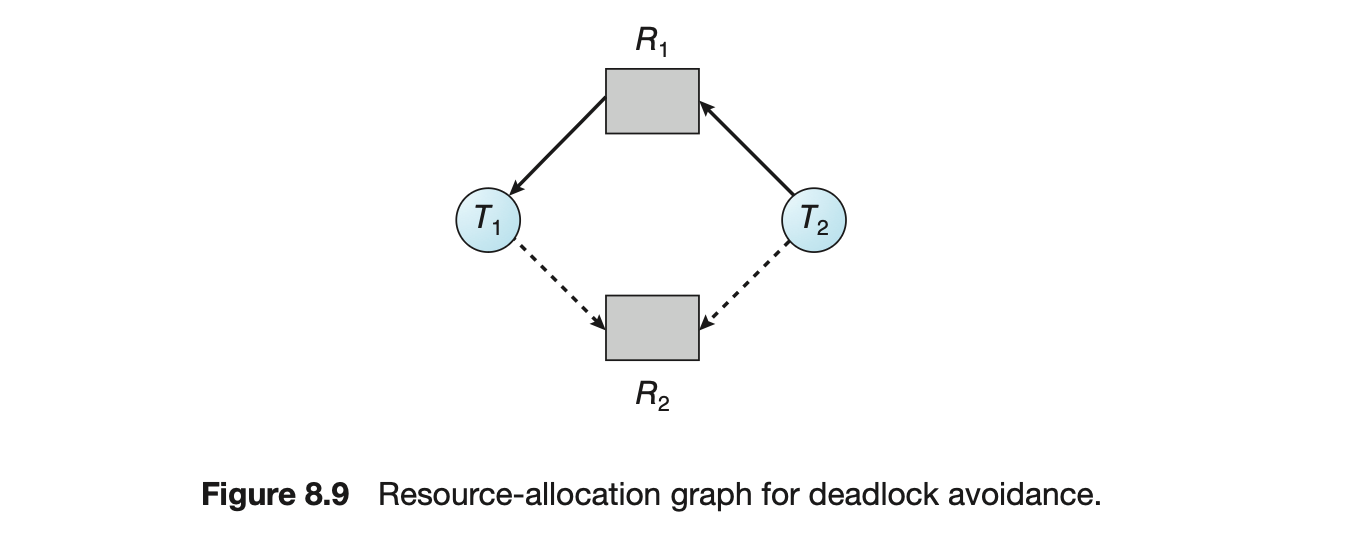 When a new thread enters the system, it must declare the maximum number of instances of each resource type that it may need. This number may not exceed the total number of resources in the system. When a user requests a set of resources, the system must determine whether the allocation of these resources will leave the system in a safe state. If it will, the resources are allocated; otherwise, the thread must wait until some other thread releases enough resources.
When a new thread enters the system, it must declare the maximum number of instances of each resource type that it may need. This number may not exceed the total number of resources in the system. When a user requests a set of resources, the system must determine whether the allocation of these resources will leave the system in a safe state. If it will, the resources are allocated; otherwise, the thread must wait until some other thread releases enough resources.
Several data structures must be maintained to implement the banker's algorithm. These data structures encode the state of the resource-allocation system. We need the following data structures, where is the number of threads in the system and is the number of resource types:
- Available. A vector of length indicates the number of available resources of each type. If equals , then instances of resource type are available.
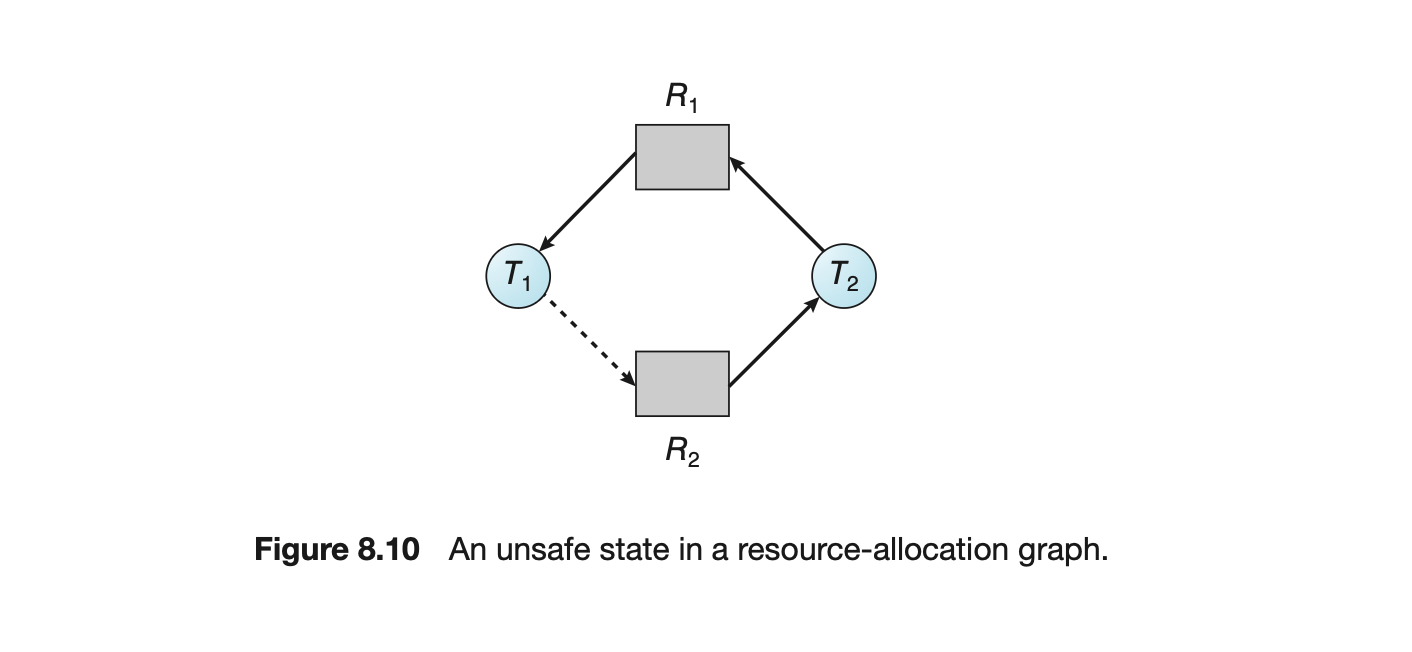
- Max. An matrix defines the maximum demand of each thread. If equals , then thread may request at most instances of resource type .
- Allocation. An matrix defines the number of resources of each type currently allocated to each thread. If equals , then thread is currently allocated instances of resource type .
- Need. An matrix indicates the remaining resource need of each thread. If equals , then thread may need more instances of resource type to complete its task. Note that equals .
These data structures vary over time in both size and value.
To simplify the presentation of the banker's algorithm, we next establish some notation. Let and be vectors of length . We say that if and only if for all . For example, if (1,7,3,2) and (0,3,2,1), then . In addition, if and .
We can treat each row in the matrices and as vectors and refer to them as and . The vector specifies the resources currently allocated to thread ; the vector specifies the additional resources that thread may still request to complete its task.
8.6.3.1 Safety Algorithm
We can now present the algorithm for finding out whether or not a system is in a safe state. This algorithm can be described as follows:
- Let and be vectors of length and , respectively. Initialize and for .
- Find an index such that both 1. 2. If no such exists, go to step 4.
- Go to step 2.
- If for all , then the system is in a safe state.
This algorithm may require an order of operations to determine whether a state is safe.
8.6.3.2 Resource-Request Algorithm
Next, we describe the algorithm for determining whether requests can be safely granted. Let be the request vector for thread . If , then thread wants instances of resource type . When a request for resources is made by thread , the following actions are taken:
- If , go to step 2. Otherwise, raise an error condition, since the thread has exceeded its maximum claim.
- If , go to step 3. Otherwise, must wait, since the resources are not available.
- Have the system pretend to have allocated the requested resources to thread by modifying the state as follows:
 If the resulting resource-allocation state is safe, the transaction is completed, and thread is allocated its resources. However, if the new state is unsafe, then must wait for , and the old resource-allocation state is restored.
If the resulting resource-allocation state is safe, the transaction is completed, and thread is allocated its resources. However, if the new state is unsafe, then must wait for , and the old resource-allocation state is restored.
8.6.3 An Illustrative Example
To illustrate the use of the banker's algorithm, consider a system with five threads through and three resource types , , and . Resource type has ten instances, resource type has five instances, and resource type has seven instances. Suppose that the following snapshot represents the current state of the system:
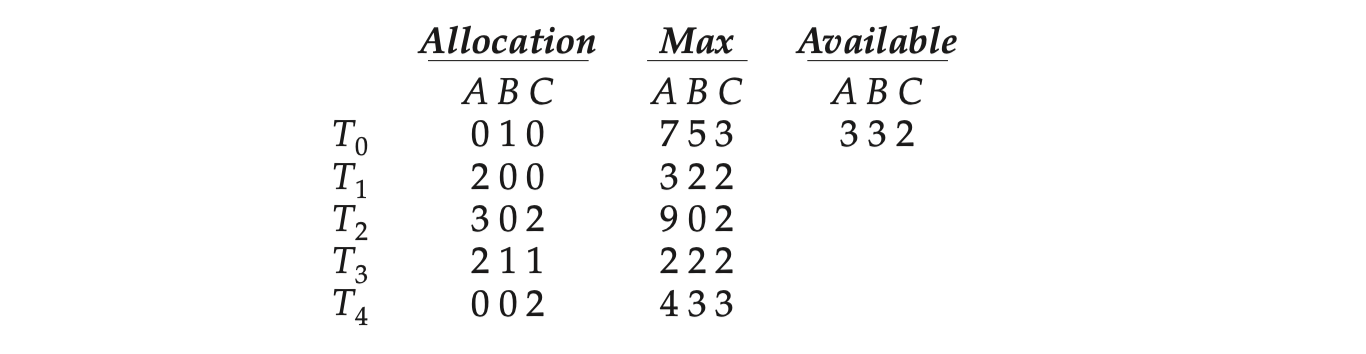 The content of the matrix is defined to be and is as follows:
The content of the matrix is defined to be and is as follows:
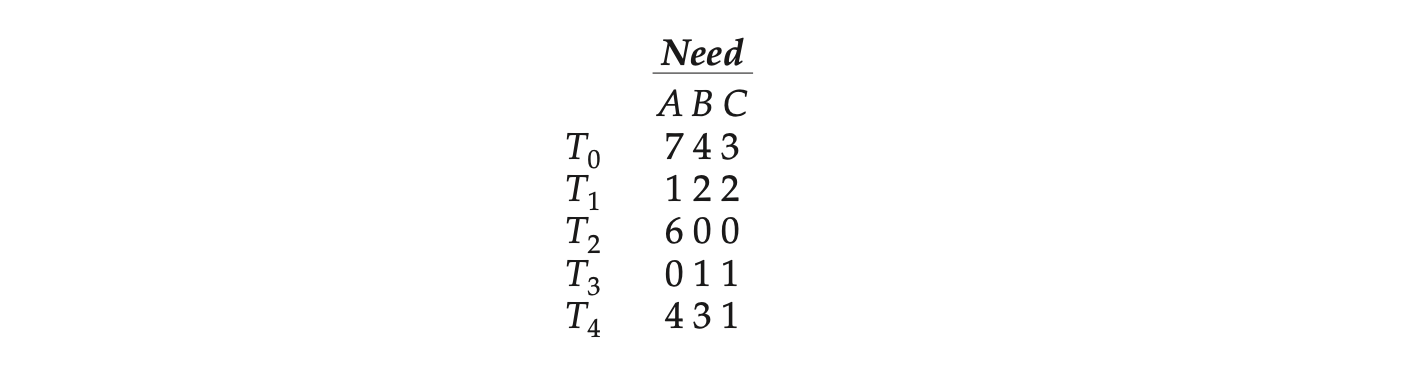 We claim that the system is currently in a safe state. Indeed, the sequence <, , , , > satisfies the safety criteria. Suppose now that thread requests one additional instance of resource type and two instances of resource type , so = (1,0,2). To decide whether this request can be immediately granted, we first check that --that is, that(1,0,2) (3,3,2), which is true. We then pretend that this request has been fulfilled, and we arrive at the following new state:
We claim that the system is currently in a safe state. Indeed, the sequence <, , , , > satisfies the safety criteria. Suppose now that thread requests one additional instance of resource type and two instances of resource type , so = (1,0,2). To decide whether this request can be immediately granted, we first check that --that is, that(1,0,2) (3,3,2), which is true. We then pretend that this request has been fulfilled, and we arrive at the following new state:
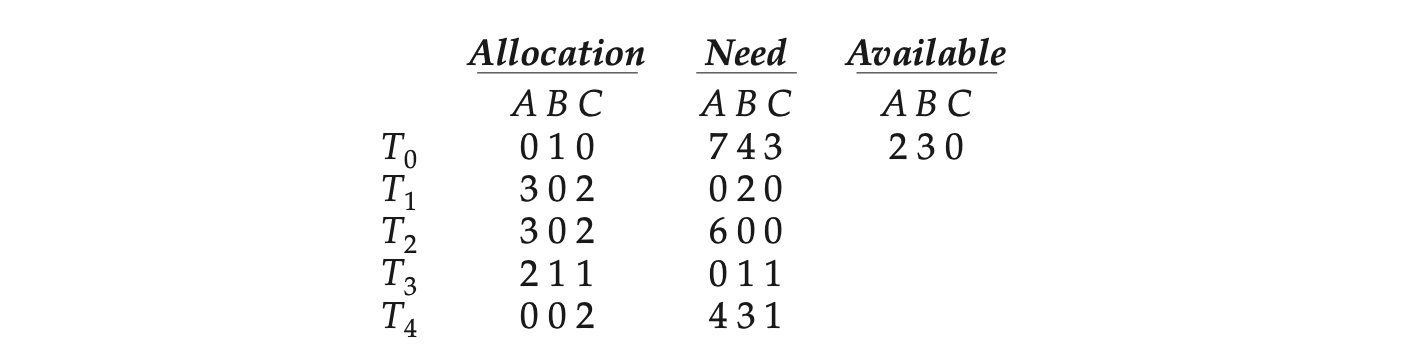
We must determine whether this new system state is safe. To do so, we execute our safety algorithm and find that the sequence <, , , , > satisfies the safety requirement. Hence, we can immediately grant the request of thread .
You should be able to see, however, that when the system is in this state, a request for (3,3,0) by cannot be granted, since the resources are not available. Furthermore, a request for (0,2,0) by cannot be granted, even though the resources are available, since the resulting state is unsafe.
We leave it as a programming exercise for students to implement the banker's algorithm.
8.7 Deadlock Detection
If a system does not employ either a deadlock-prevention or a deadlock-avoidance algorithm, then a deadlock situation may occur. In this environment, the system may provide:
- An algorithm that examines the state of the system to determine whether a deadlock has occurred
- An algorithm to recover from the deadlock
Next, we discuss these two requirements as they pertain to systems with only a single instance of each resource type, as well as to systems with several instances of each resource type. At this point, however, we note that a detection-and-recovery scheme requires overhead that includes not only the run-time costs of maintaining the necessary information and executing the detection algorithm but also the potential losses inherent in recovering from a deadlock.
8.7.1 Single Instance of Each Resource Type
If all resources have only a single instance, then we can define a deadlock-detection algorithm that uses a variant of the resource-allocation graph, called a wait-for graph. We obtain this graph from the resource-allocation graph by removing the resource nodes and collapsing the appropriate edges.
More precisely, an edge from to in a wait-for graph implies that thread is waiting for thread to release a resource that needs. An edge exists in a wait-for graph if and only if the corresponding resource-allocation graph contains two edges and for some resource . In Figure 8.11, we present a resource-allocation graph and the corresponding wait-for graph.
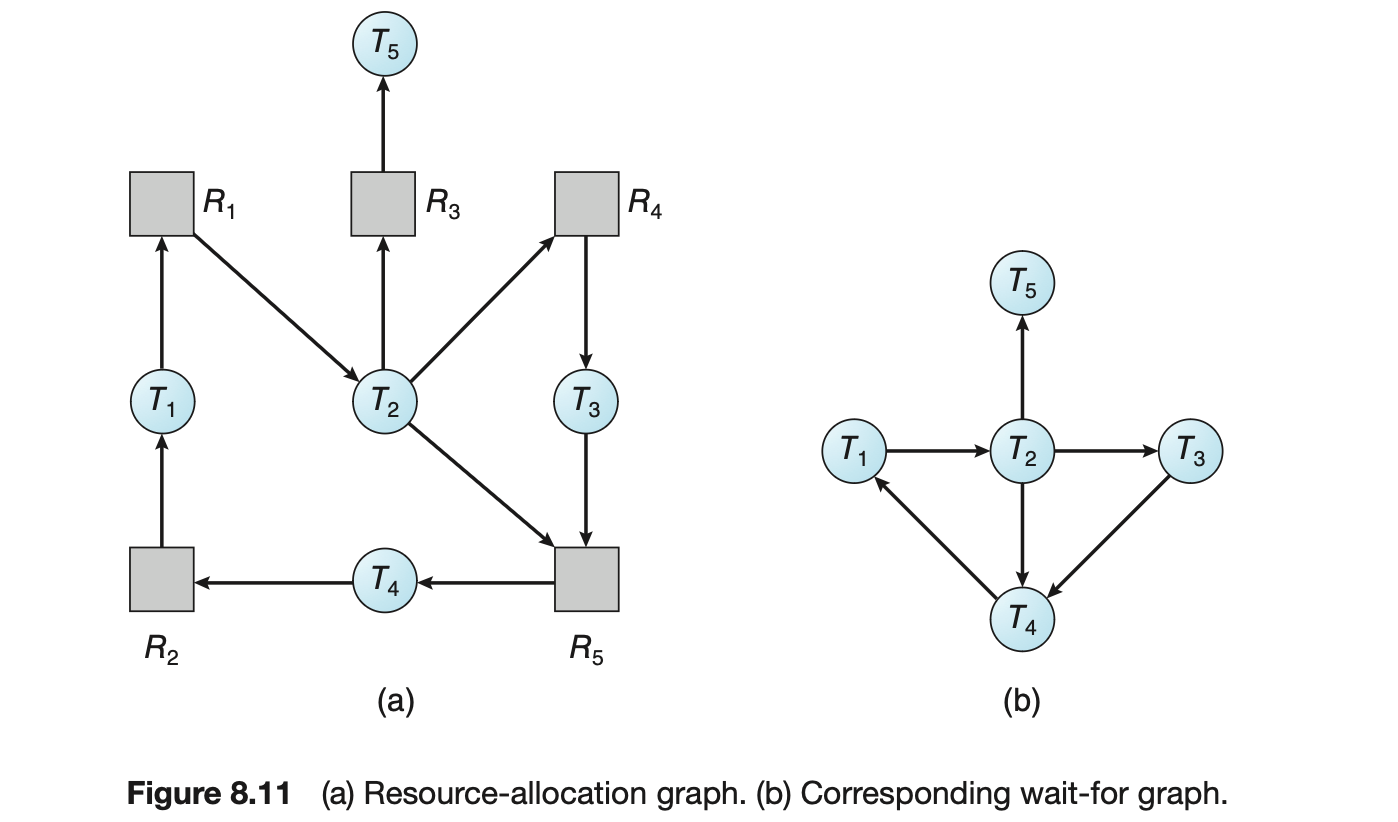
As before, a deadlock exists in the system if and only if the wait-for graph contains a cycle. To detect deadlocks, the system needs to maintain the wait-for graph and periodically inovoke an algorithm that searches for a cycle in the graph. An algorithm to detect a cycle in a graph requires operations, where is the number of vertices in the graph.
The BCC toolkit described in Section 2.10.4 provides a tool that can detect potential deadlocks with Pthreads mutex locks in a user process running on a Linux system. The BCC tool deadlock_detector operates by inserting probes which trace calls to the pthread_mutex_lock() and pthread_mutex_unlock() functions. When the specified process makes a call to either function, deadlock_detector constructs a wait-for graph of mutex locks in that process, and reports the possibility of deadlock if it detects a cycle in the graph.
8.7.2 Several Instances of a Resource Type
The wait-for graph scheme is not applicable to a resource-allocation system with multiple instances of each resource type. We turn now to a deadlock-detection algorithm that is applicable to such a system. The algorithm employs several time-varying data structures that are similar to those used in the banker's algorithm (Section 8.6.3):
- Available. A vector of length indicates the number of available resources of each type.
DEADLOCK DETECTION USING JAVA THREAD DUMPS
Although Java does not provide explicit support for deadlock detection, a thread dump can be used to analyze a running program to determine if there is a deadlock. A thread dump is a useful debugging tool that displays a snapshot of the states of all threads in a Java application. Java thread dumps also show locking information, including which locks a blocked thread is waiting to acquire. When a thread dump is generated, the JVM searches the wait-for graph to detect cycles, reporting any deadlocks it detects. To generate a thread dump of a running application, from the command line enter:
Ctrl-L (UNIX, Linux, or macOS)Ctrl-Break (Windows)In the source-code download for this text, we provide a Java example of the program shown in Figure 8.1 and describe how to generate a thread dump that reports the deadlocked Java threads.
- Allocation. An matrix defines the number of resources of each type currently allocated to each thread.
- Request. An matrix indicates the current request of each thread. If equals , then thread is requesting more instances of resource type .
The relation between two vectors is defined as in Section 8.6.3. To simplify notation, we again treat the rows in the matrices and as vectors; we refer to them as and . The detection algorithm described here simply investigates every possible allocation sequence for the threads that remain to be completed. Compare this algorithm with the banker's algorithm of Section 8.6.3.
- Let and be vectors of length and , respectively. Initialize . For , ,..., -, if , then . Otherwise, .
- Find an index such that both a. b. If no such exists, go to step 4.
- Go to step 2.
- If for some , , then the system is in a deadlocked state. Moreover, if , then thread is deadlocked.
This algorithm requires an order of operations to detect whether the system is in a deadlocked state.
You may wonder why we reclaim the resources of thread (in step 3) as soon as we determine that (in step 2b). We know that is currently not involved in a deadlock (since ). Thus, we take an optimistic attitude and assume that will require no more resources to complete its task; it will thus soon return all currently allocated resources to the system. If our assumption is incorrect, a deadlock may occur later. That deadlock will be detected the next time the deadlock-detection algorithm is invoked.
To illustrate this algorithm, we consider a system with five threads through and three resource types , , and . Resource type has seven instances, resource type has two instances, and resource type has six instances. The following snapshot represents the current state of the system:
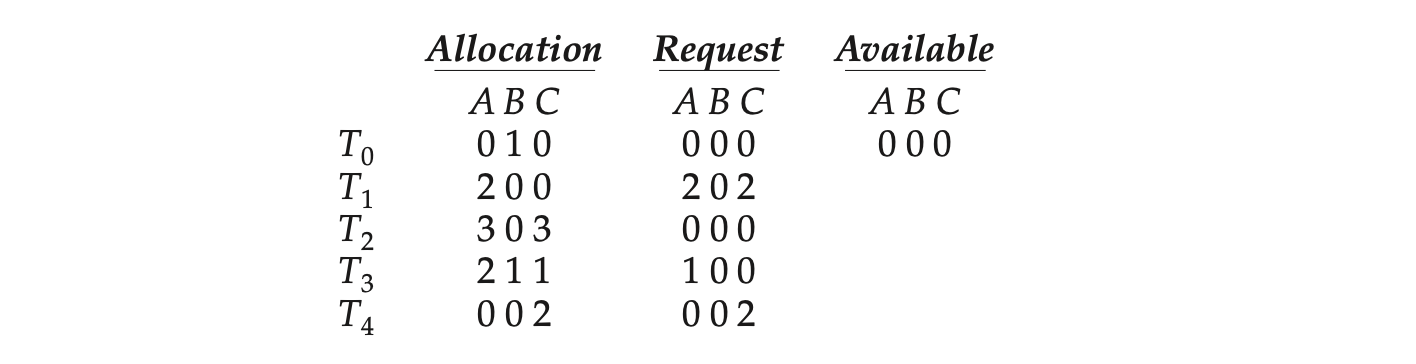 We claim that the system is not in a deadlocked state. Indeed, if we execute our algorithm, we will find that the sequence , , , , results in == true for all .
We claim that the system is not in a deadlocked state. Indeed, if we execute our algorithm, we will find that the sequence , , , , results in == true for all .
Suppose now that thread makes one additional request for an instance of type . The matrix is modified as follows:
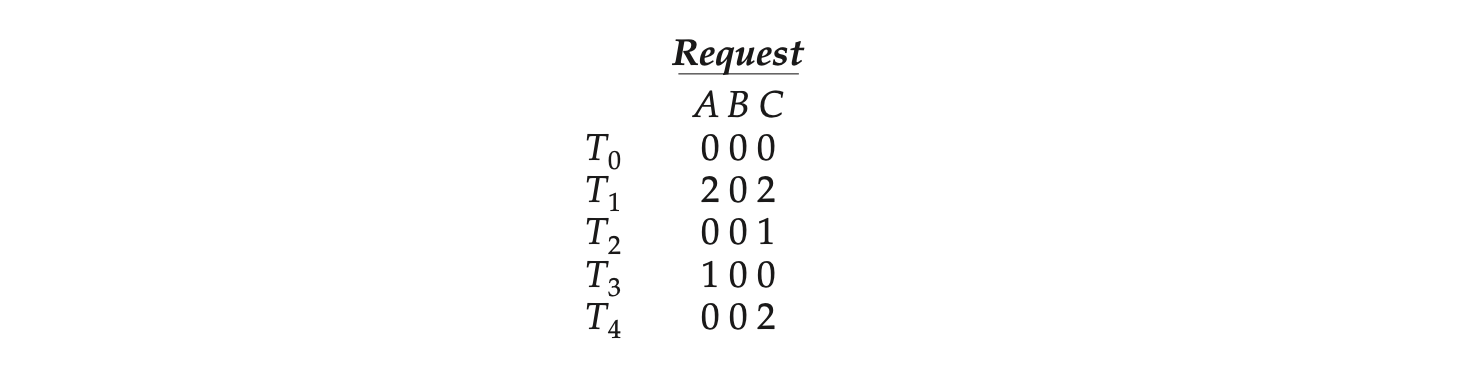 We claim that the system is now deadlocked. Although we can reclaim the resources held by thread , the number of available resources is not sufficient to fulfill the requests of the other threads. Thus, a deadlock exists, consisting of threads , , , and .
We claim that the system is now deadlocked. Although we can reclaim the resources held by thread , the number of available resources is not sufficient to fulfill the requests of the other threads. Thus, a deadlock exists, consisting of threads , , , and .
8.7.3 Detection-Algorithm Usage
When should we invoke the detection algorithm? The answer depends on two factors:
- How often is a deadlock likely to occur?
- How many threads will be affected by deadlock when it happens?
MANAGING DEADLOCK IN DATABASES
Database systems provide a useful illustration of how both open-source and commercial software manage deadlock. Updates to a database may be performed as transactions, and to ensure data integrity, locks are typically used. A transaction may involve several locks, so it comes as no surprise that deadlocks are possible in a database with multiple concurrent transac- tions. To manage deadlock, most transactional database systems include a deadlock detection and recovery mechanism. The database server will peri- odically search for cycles in the wait-for graph to detect deadlock among a set of transactions. When deadlock is detected, a victim is selected and the transaction is aborted and rolled back, releasing the locks held by the victim transaction and freeing the remaining transactions from deadlock. Once the remaining transactions have resumed, the aborted transaction is reissued. Choice of a victim transaction depends on the database system; for instance, MySQL attempts to select transactions that minimize the number of rows being inserted, updated, or deleted.
If deadlocks occur frequently, then the detection algorithm should be invoked frequently. Resources allocated to deadlocked threads will be idle until the deadlock can be broken. In addition, the number of threads involved in the deadlock cycle may grow.
Deadlocks occur only when some thread makes a request that cannot be granted immediately. This request may be the final request that completes a chain of waiting threads. In the extreme, then, we can invoke the deadlock- detection algorithm every time a request for allocation cannot be granted immediately. In this case, we can identify not only the deadlocked set of threads but also the specific thread that “caused” the deadlock. (In reality, each of the deadlocked threads is a link in the cycle in the resource graph, so all of them, jointly, caused the deadlock.) If there are many different resource types, one request may create many cycles in the resource graph, each cycle completed by the most recent request and “caused” by the one identifiable thread.
Of course, invoking the deadlock-detection algorithm for every resource request will incur considerable overhead in computation time. A less expen- sive alternative is simply to invoke the algorithm at defined intervals—for example, once per hour or whenever CPU utilization drops below 40 percent. (A deadlock eventually cripples system throughput and causes CPU utilization to drop.) If the detection algorithm is invoked at arbitrary points in time, the resource graph may contain many cycles. In this case, we generally cannot tell which of the many deadlocked threads “caused” the deadlock.
8.8 Recovery from Deadlock
When a detection algorithm determines that a deadlock exists, several alter- natives are available. One possibility is to inform the operator that a deadlock has occurred and to let the operator deal with the deadlock manually. Another possibility is to let the system recover from the deadlock automatically. There are two options for breaking a deadlock. One is simply to abort one or more threads to break the circular wait. The other is to preempt some resources from one or more of the deadlocked threads.
Data-drivenare two options for breaking a deadlock. One is simply to abort one or more threads to break the circular wait. The other is to preempt some resources from one or more of the deadlocked threads.
8.8.1 Process and Thread Termination
To eliminate deadlocks by aborting a process or thread, we use one of two methods. In both methods, the system reclaims all resources allocated to the terminated processes.
- Abort all deadlocked processes. This method clearly will break the deadlock cycle, but at great expense. The deadlocked processes may have computed for a long time, and the results of these partial computations must be discarded and probably will have to be recomputed later.
- Abort one process at a time until the deadlock cycle is eliminated. This method incurs considerable overhead, since after each process is aborted, a deadlock-detection algorithm must be invoked to determine whether any processes are still deadlocked.
Aborting a process may not be easy. If the process was in the midst of updating a file, terminating it may leave that file in an incorrect state. Similarly, if the process was in the midst of updating shared data while holding a mutex lock, the system must restore the status of the lock as being available, although no guarantees can be made regarding the integrity of the shared data.
If the partial termination method is used, then we must determine which deadlocked process (or processes) should be terminated. This determination is a policy decision, similar to CPU-scheduling decisions. The question is basically an economic one; we should abort those processes whose termination will incur the minimum cost. Unfortunately, the term minimum cost is not a precise one. Many factors may affect which process is chosen, including:
- What the priority of the process is
- How long the process has computed and how much longer the process will compute before completing its designated task
- How many and what types of resources the process has used (for example, whether the resources are simple to preempt)
- How many more resources the process needs in order to complete
- How many processes will need to be terminated
8.8.2 Resource Preemption
To eliminate deadlocks using resource preemption, we successively preempt some resources from processes and give these resources to other processes until the deadlock cycle is broken.
If preemption is required to deal with deadlocks, then three issues need to be addressed:
- Selecting a victim. Which resources and which processes are to be pre-empted? As in process termination, we must determine the order of preemption to minimize cost. Cost factors may include such parameters as the number of resources a deadlocked process is holding and the amount of time the process has thus far consumed.
- Rollback. If we preempt a resource from a process, what should be done with that process? Clearly, it cannot continue with its normal execution; it is missing some needed resource. We must roll back the process to some safe state and restart it from that state. Since, in general, it is difficult to determine what a safe state is, the simplest solution is a total rollback: abort the process and then restart it. Although it is more effective to roll back the process only as far as necessary to break the deadlock, this method requires the system to keep more information about the state of all running processes.
- Starvation. How do we ensure that starvation will not occur? That is, how can we guarantee that resources will not always be preempted from the same process? In a system where victim selection is based primarily on cost factors, it may happen that the same process is always picked as a victim. As a result, this process never completes its designated task, a starvation situation any practical system must address. Clearly, we must ensure that a process can be picked as a victim only a (small) finite number of times. The most common solution is to include the number of rollbacks in the cost factor.
8.9 Summary
- Deadlock occurs in a set of processes when every process in the set is waiting for an event that can only be caused by another process in the set.
- There are four necessary conditions for deadlock: (1) mutual exclusion, (2) hold and wait, (3) no preemption, and (4) circular wait. Deadlock is only possible when all four conditions are present.
- Deadlocks can be modeled with resource-allocation graphs, where a cycle indicates deadlock.
- Deadlocks can be prevented by ensuring that one of the four necessary conditions for deadlock cannot occur. Of the four necessary conditions, eliminating the circular wait is the only practical approach.
- Deadlock can be avoided by using the banker's algorithm, which does not grant resources if doing so would lead the system into an unsafe state where deadlock would be possible.
- A deadlock-detection algorithm can evaluate processes and resources on a running system to determine if a set of processes is in a deadlocked state.
- If deadlock does occur, a system can attempt to recover from the deadlock by either aborting one of the processes in the circular wait or preempting resources that have been assigned to a deadlocked process.
8.1 List three examples of deadlocks that are not related to a computer-system environment.
8.2 Suppose that a system is in an unsafe state. Show that it is possible for the threads to complete their execution without entering a deadlocked state.
8.3 Consider the following snapshot of a system:
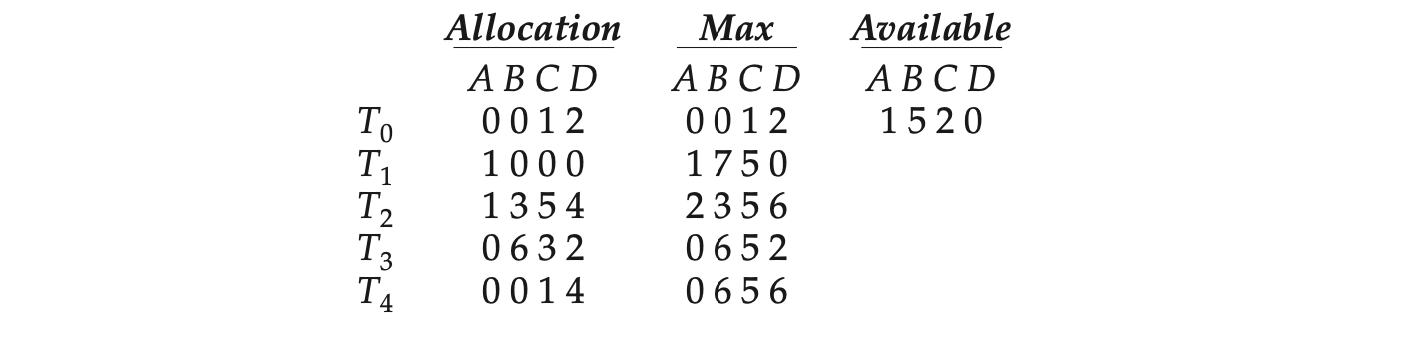
Answer the following questions using the banker's algorithm:
- What is the content of the matrix Need?
- Is the system in a safe state?
- If a request from thread arrives for (0,4,2,0), can the request be granted immediately?
8.4 A possible method for preventing deadlocks is to have a single, higher-order resource that must be requested before any other resource. For example, if multiple threads attempt to access the synchronization objects , deadlock is possible. (Such synchronization objects may include mutexes, semaphores, condition variables, and the like.) We can prevent deadlock by adding a sixth object . Whenever a thread wants to acquire the synchronization lock for any object , it must first acquire the lock for object . This solution is known as containment: the locks for objects are contained within the lock for object . Compare this scheme with the circular-wait scheme of Section 8.5.4.
8.5 Prove that the safety algorithm presented in Section 8.6.3 requires an order of operations.
8.6 Consider a computer system that runs 5,000 jobs per month and has no deadlock-prevention or deadlock-avoidance scheme. Deadlocks occur about twice per month, and the operator must terminate and rerun about ten jobs per deadlock. Each job is worth about two dollars (in CPU time), and the jobs terminated tend to be about half done when they are aborted.
A systems programmer has estimated that a deadlock-avoidance algorithm (like the banker's algorithm) could be installed in the system with an increase of about 10 percent in the average execution time perjob. Since the machine currently has 30 percent idle time, all 5,000 jobs per month could still be run, although turnaround time would increase by about 20 percent on average.
- What are the arguments for installing the deadlock-avoidance algorithm?
- What are the arguments against installing the deadlock-avoidance algorithm?
8.7 Can a system detect that some of its threads are starving? If you answer "yes," explain how it can. If you answer "no," explain how the system can deal with the starvation problem.
8.8 Consider the following resource-allocation policy. Requests for and releases of resources are allowed at any time. If a request for resources cannot be satisfied because the resources are not available, then we check any threads that are blocked waiting for resources. If a blocked thread has the desired resources, then these resources are taken away from it and are given to the requesting thread. The vector of resources for which the blocked thread is waiting is increased to include the resources that were taken away.
For example, a system has three resource types, and the vector is initialized to (4,2,2). If thread asks for (2,2,1), it gets them. If asks for (1,0,1), it gets them. Then, if asks for (0,0,1), it is blocked (resource not available). If now asks for (2,0,0), it gets the available one (1,0,0), as well as one that was allocated to (since is blocked). 's vector goes down to (1,2,1), and its vector goes up to (1,0,1).
- Can deadlock occur? If you answer "yes," give an example. If you answer "no," specify which necessary condition cannot occur.
- Can indefinite blocking occur? Explain your answer.
8.9 Consider the following snapshot of a system:
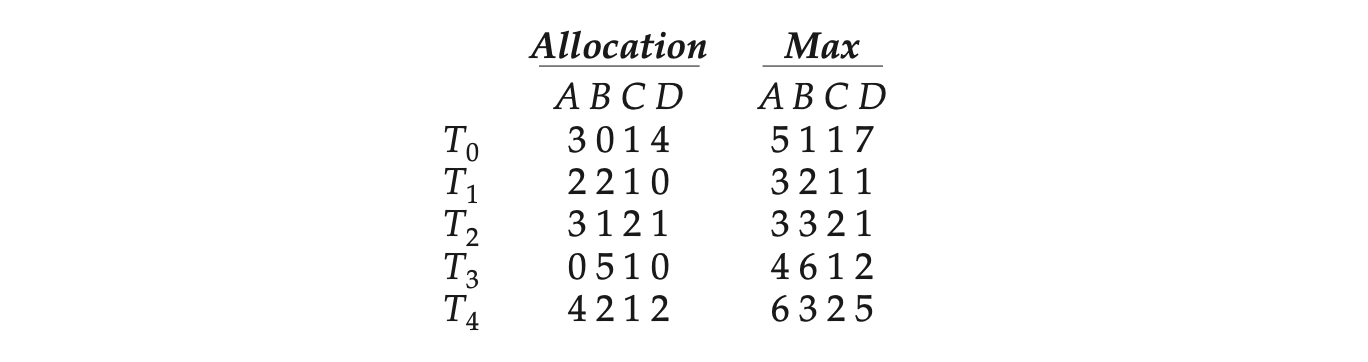 Using the banker's algorithm, determine whether or not each of the following states is unsafe. If the state is safe, illustrate the order in which the threads may complete. Otherwise, illustrate why the state is unsafe.
Using the banker's algorithm, determine whether or not each of the following states is unsafe. If the state is safe, illustrate the order in which the threads may complete. Otherwise, illustrate why the state is unsafe.
8.10 Suppose that you have coded the deadlock-avoidance safety algorithm that determines if a system is in a safe state or not, and now have been asked to implement the deadlock-detection algorithm. Can you do so by simply using the safety algorithm code and redefining + , where is a vector specifying the resources for which thread is waiting and is as defined in Section 8.6? Explain your answer.
8.11: Is it possible to have a deadlock involving only one single-threaded process? Explain your answer.
Further Reading
Most research involving deadlock was conducted many years ago. [Dijkstra(1965)] was one of the first and most influential contributors in the deadlock area.
Details of how the MySQL database manages deadlock can be found at http://dev.mysql.com/.
Details on the lockdep tool can be found at https://www.kernel.org/doc/Documentation/locking/lockdep-design.txt.
Bibliography
[11] [12] E. W. Dijkstra, "Cooperating Sequential Processes", Technical report, Technological University, Eindhoven, the Netherlands (1965).
Chapter 8 Exercises
- 8.12 Consider the traffic deadlock depicted in Figure 8.12.
- Show that the four necessary conditions for deadlock hold in this example.
- State a simple rule for avoiding deadlocks in this system.
- 8.13 Draw the resource-allocation graph that illustrates deadlock from the program example shown in Figure 8.1 in Section 8.2.
- 8.14 In Section 6.8.1, we described a potential deadlock scenario involving processes and and semaphores and . Draw the resource-allocation graph that illustrates deadlock under the scenario presented in that section.
- 8.15 Assume that a multithreaded application uses only readerwriter locks for synchronization. Applying the four necessary conditions for deadlock, is deadlock still possible if multiple readerwriter locks are used?
- 8.16 The program example shown in Figure 8.1 doesn't always lead to deadlock. Describe what role the CPU scheduler plays and how it can contribute to deadlock in this program.
- 8.17 In Section 8.5.4, we described a situation in which we prevent deadlock by ensuring that all locks are acquired in a certain order. However, we also point out that deadlock is possible in this situation if two threads simultaneously invoke the transaction() function. Fix the transaction() function to prevent deadlocks.
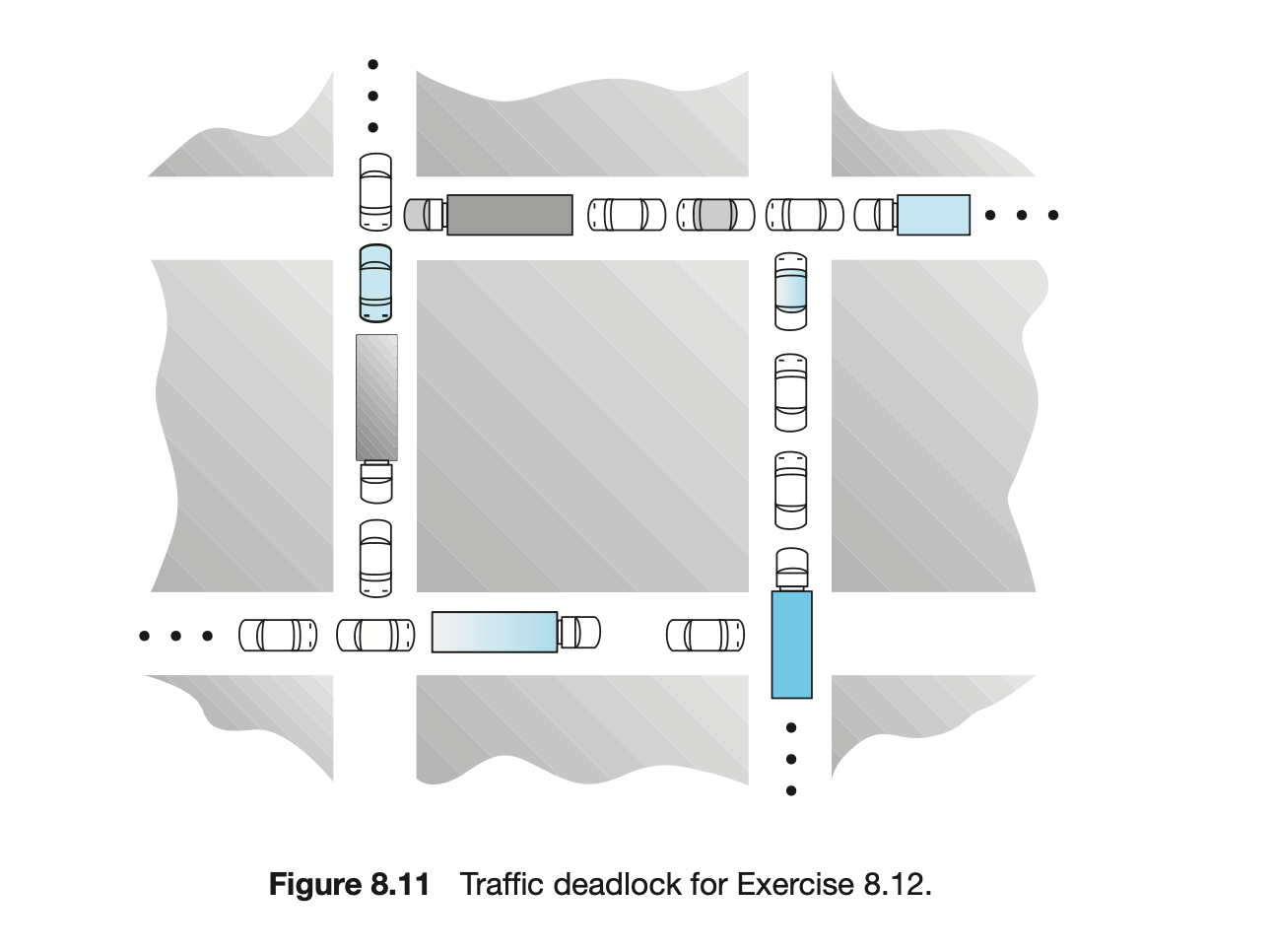
8.18 Which of the six resource-allocation graphs shown in Figure 8.12 illustrate deadlock? For those situations that are deadlocked, provide the cycle of threads and resources. Where there is not a deadlock situation, illustrate the order in which the threads may complete execution.
8.19 Compare the circular-wait scheme with the various deadlock-avoidance schemes (like the banker's algorithm) with respect to the following issues:
- Runtime overhead
- System throughput
- In a real computer system, neither the resources available nor the demands of threads for resources are consistent over long periods (months). Resources break or are replaced, new processes and threads come and go, and new resources are bought and added to the system. If deadlock is controlled by the banker's algorithm, which of the
*
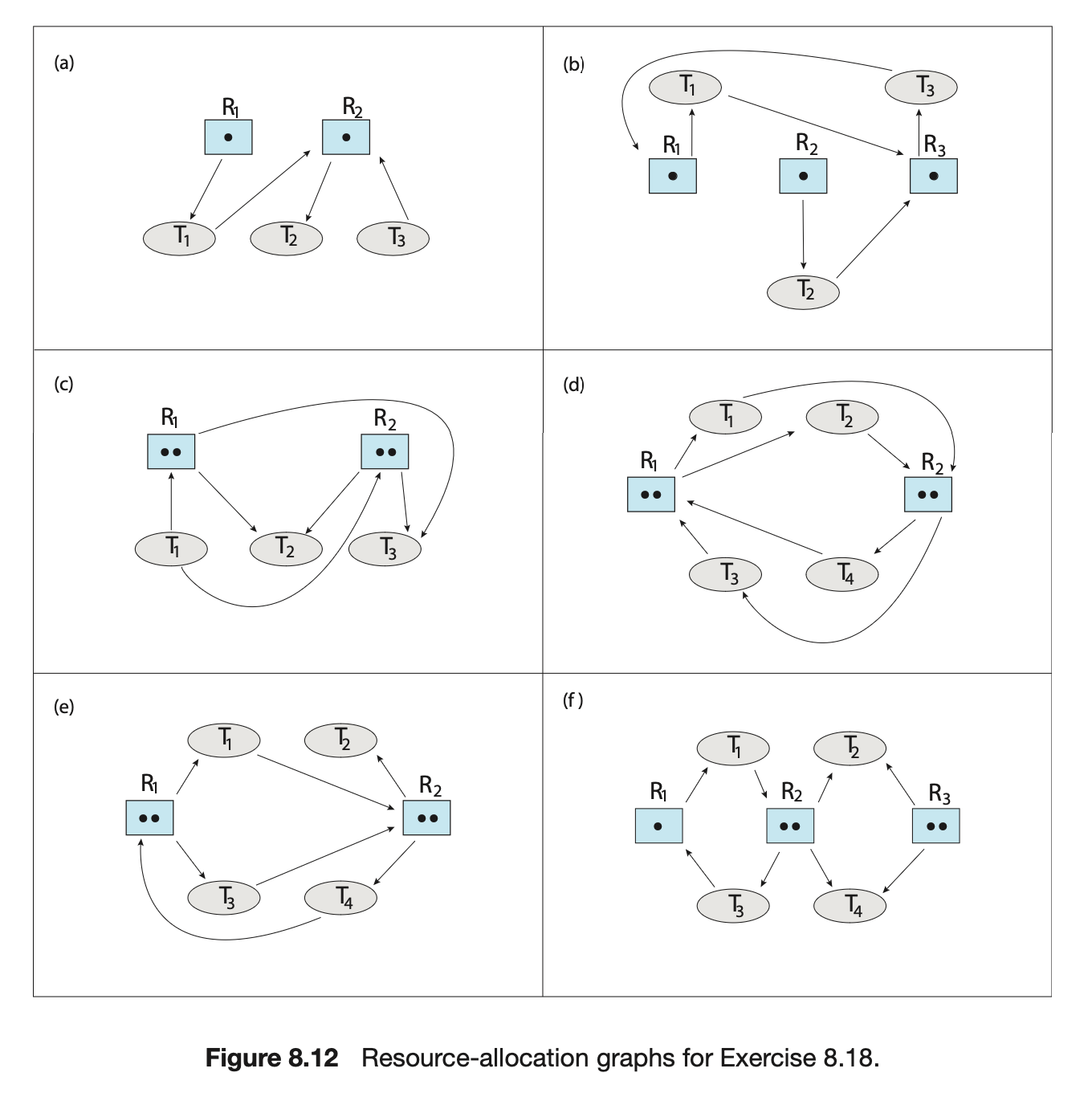
following changes can be made safely (without introducing the possibility of deadlock), and under what circumstances?
- Increase Available (new resources added).
- Decrease Available (resource permanently removed from system).
- Increase Max for one thread (the thread needs or wants more resources than allowed).
- Decrease Max for one thread (the thread decides it does not need that many resources).
- Increase the number of threads.
- Decrease the number of threads.
8.21 Consider the following snapshot of a system:
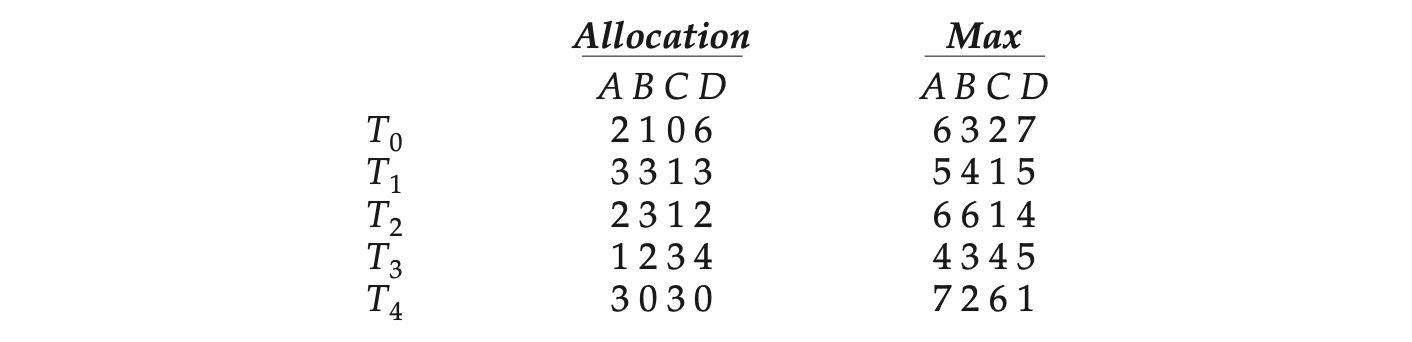
What are the contents of the Need matrix?
8.22 Consider a system consisting of four resources of the same type that are shared by three threads, each of which needs at most two resources. Show that the system is deadlock free.
8.23 Consider a system consisting of resources of the same type being shared by threads. A thread can request or release only one resource at a time. Show that the system is deadlock free if the following two conditions hold:
- The maximum need of each thread is between one resource and resources.
- The sum of all maximum needs is less than .
8.24 Consider the version of the dining-philosophers problem in which the chopsticks are placed at the center of the table and any two of them can be used by a philosopher. Assume that requests for chopsticks are made one at a time. Describe a simple rule for determining whether a particular request can be satisfied without causing deadlock given the current allocation of chopsticks to philosophers.
8.25 Consider again the setting in the preceding exercise. Assume now that each philosopher requires three chopsticks to eat. Resource requests are still issued one at a time. Describe some simple rules for determining whether a particular request can be satisfied without causing deadlock given the current allocation of chopsticks to philosophers.
8.26 We can obtain the banker's algorithm for a single resource type from the general banker's algorithm simply by reducing the dimensionality of the various arrays by 1. Show through an example that we cannot implement the multiple-resource-type banker's scheme by applying the single-resource-type scheme to each resource type individually.
8.27 Consider the following snapshot of a system:
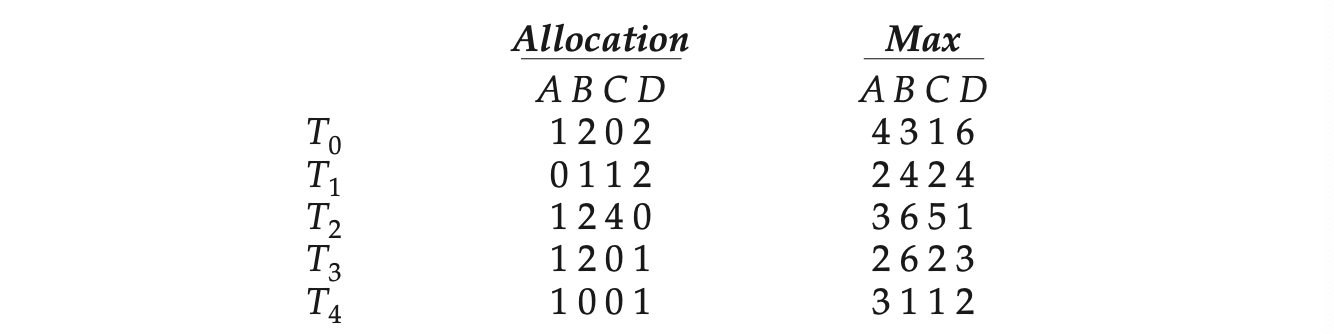
Using the banker’s algorithm, determine whether or not each of the following states is unsafe. If the state is safe, illustrate the order in which the threads may complete. Otherwise, illustrate why the state is unsafe.
 8.28 Consider the following snapshot of a system:
8.28 Consider the following snapshot of a system:
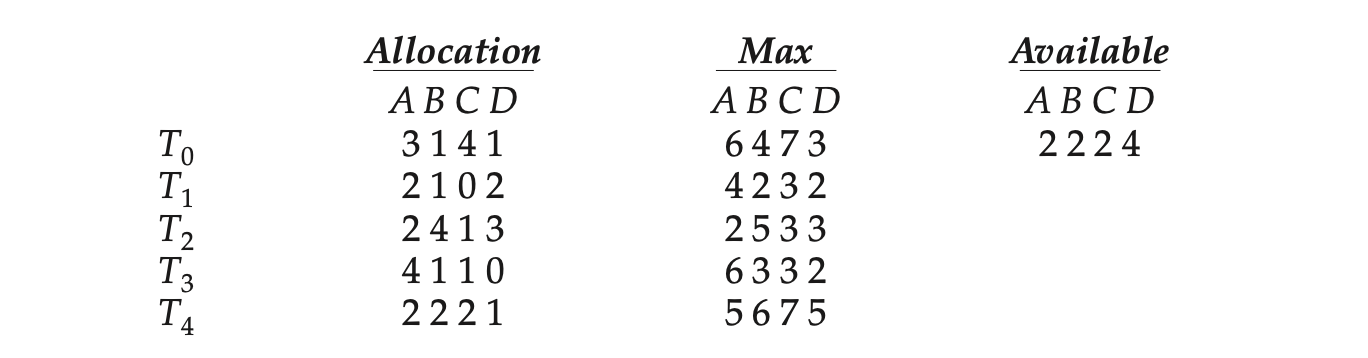 Answer the following questions using the banker’s algorithm:
a. Illustrate that the system is in a safe state by demonstrating an order in which the threads may complete.
b. If a request from thread arrives for (2, 2, 2, 4), can the request be granted immediately?
c. If a request from thread arrives for (0, 1, 1, 0), can the request be granted immediately?
d. If a request from thread arrives for (2, 2, 1, 2), can the request be granted immediately?
Answer the following questions using the banker’s algorithm:
a. Illustrate that the system is in a safe state by demonstrating an order in which the threads may complete.
b. If a request from thread arrives for (2, 2, 2, 4), can the request be granted immediately?
c. If a request from thread arrives for (0, 1, 1, 0), can the request be granted immediately?
d. If a request from thread arrives for (2, 2, 1, 2), can the request be granted immediately?
What is the optimistic assumption made in the deadlock-detection algorithm? How can this assumption be violated?
- A single-lane bridge connects the two Vermont villages of North Tunbridge and South Tunbridge. Farmers in the two villages use this bridge to deliver their produce to the neighboring town. The bridge can become deadlocked if a northbound and a southbound farmer get on the bridge at the same time. (Vermont farmers are stubborn and are unable to back up.) Using semaphores and/or mutex locks, design an algorithm in pseudocode that prevents deadlock. Initially, do not be concerned about starvation (the situation in which northbound farmers prevent southbound farmers from using the bridge, or vice versa).
- Modify your solution to Exercise 8.30 so that it is starvation-free.
8.29 What is the optimistic assumption made in the deadlock-detection algorithm? How can this assumption be violated?
8.30 A single-lane bridge connects the two Vermont villages of North Tun- bridge and South Tunbridge. Farmers in the two villages use this bridge to deliver their produce to the neighboring town. The bridge can become deadlocked if a northbound and a southbound farmer get on the bridge at the same time. (Vermont farmers are stubborn and are unable to back up.) Using semaphores and/or mutex locks, design an algorithm in pseudocode that prevents deadlock. Initially, do not be concerned about starvation (the situation in which northbound farmers prevent southbound farmers from using the bridge, or vice versa).
8.31 Modify your solution to Exercise 8.30 so that it is starvation-free.
8.32 Implement your solution to Exercise 8.30 using POSIX synchronization. In particular, represent northbound and southbound farmers as separate threads. Once a farmer is on the bridge, the associated thread will sleep for a random period of time, representing traveling across the bridge. Design your program so that you can create several threads representing the northbound and southbound farmers.
8.33 In Figure 8.7, we illustrate a transaction() function that dynamically acquires locks. In the text, we describe how this function presents difficulties for acquiring locks in a way that avoids deadlock. Using the Java implementation of transaction() that is provided in the source-code download for this text, modify it using the Sys-tem.identityHashCode() method so that the locks are acquired in order.
Programming Projects
Banker’s Algorithm
For this project, you will write a program that implements the banker’s algo- rithm discussed in Section 8.6.3. Customers request and release resources from the bank. The banker will grant a request only if it leaves the system in a safe state. A request that leaves the system in an unsafe state will be denied. Although the code examples that describe this project are illustrated in C, you may also develop a solution using Java.
The Banker
The banker will consider requests from n customers for m resources types, as outlined in Section 8.6.3. The banker will keep track of the resources using the following data structures:
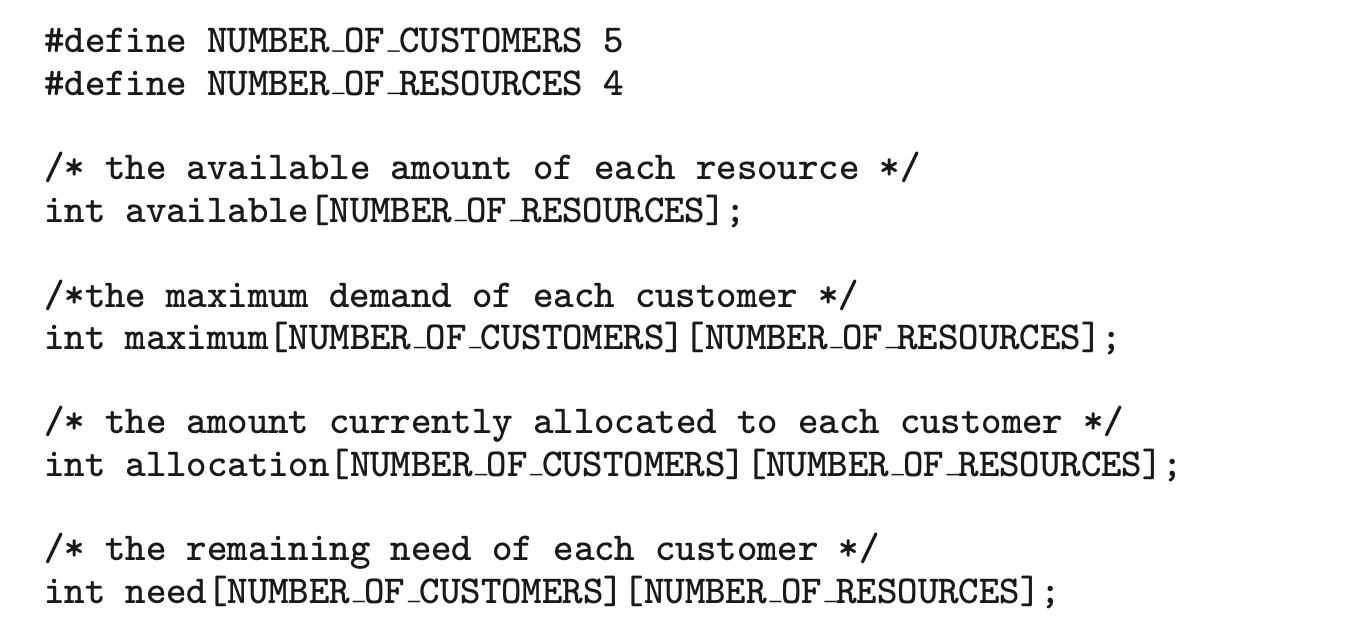 The banker will grant a request if it satisfies the safety algorithm outlined in Section 8.6.3.1. If a request does not leave the system in a safe state, the banker will deny it. Function prototypes for requesting and releasing resources are as follows:
The banker will grant a request if it satisfies the safety algorithm outlined in Section 8.6.3.1. If a request does not leave the system in a safe state, the banker will deny it. Function prototypes for requesting and releasing resources are as follows:
 The request resources() function should return 0 if successful and –1 if unsuccessful.
The request resources() function should return 0 if successful and –1 if unsuccessful.
Testing Your Implementation
Design a program that allows the user to interactively enter a request for resources, to release resources, or to output the values of the different data structures (available, maximum, allocation, and need) used with the banker's algorithm.
You should invoke your program by passing the number of resources of each type on the command line. For example, if there were four resource types, with ten instances of the first type, five of the second type, seven of the third type, and eight of the fourth type, you would invoke your program as follows:
 The available array would be initialized to these values.
The available array would be initialized to these values.
Your program will initially read in a file containing the maximum number of requests for each customer. For example, if there are five customers and four resources, the input file would appear as follows:
 where each line in the input file represents the maximum request of each resource type for each customer. Your program will initialize the maximum array to these values.
where each line in the input file represents the maximum request of each resource type for each customer. Your program will initialize the maximum array to these values.
Your program will then have the user enter commands responding to a request of resources, a release of resources, or the current values of the different data structures. Use the command 'RQ' for requesting resources, 'RL' for releasing resources, and '*' to output the values of the different data structures. For example, if customer 0 were to request the resources , the following command would be entered:
 Your program would then output whether the request would be satisfied or denied using the safety algorithm outlined in Section 8.6.3.1.
Your program would then output whether the request would be satisfied or denied using the safety algorithm outlined in Section 8.6.3.1.
Similarly, if customer 4 were to release the resources , the user would enter the following command:
 Finally, if the command '' is entered, your program would output the values of the available, maximum, allocation, and need arrays.
Finally, if the command '' is entered, your program would output the values of the available, maximum, allocation, and need arrays.